1.本发明属于钢琴调音技术领域,涉及一种调音机器人。
背景技术:
2.随着物质生活富足、科技不断进步,人们日益对高品质的生活方式有着更高的要求。尤其是对音乐的追求,人们对于音乐的需求更高,诸如钢琴、吉他等乐器的购买需求提高,尤其是钢琴的使用诉求,除了购买的需求增加,还有其他附加成本支出,其中钢琴调音的成本更为突出。为了减少钢琴调音成本,本发明涉及一种钢琴调音机器人,能够实现无人调音工作、保证调音准确度的同时,又能降低人工调音的成本。
3.以专利号97123257为例,目前使用的检测装置为激光识别琴弦振动频率,通过反射激光射线,刻录在标识区,记录振动数据,通过与存储单元预存的琴弦振动标准频率值对比,由中央处理单元分析琴音差值,再由普通操作人员完成琴弦的琴音调整。
技术实现要素:
4.本发明解决的技术问题是:一种调音机器人,包括装置固定限位模块、智能音准分析模块、机械调音模块,降低现有人工调整钢琴琴音复杂度,突破现有发明中智能识音系统结合机械手臂调整琴音技术,实现检测音准与调音全自动化。
5.本发明的技术解决方案是:一种调音机器人,包括机械调音模块、智能音准分析模块、装置固定限位模块,基于装置固定限位模块固定整体装置位于一种固定状态,通过智能音准分析模块采集琴键声音,分析琴音转换为模拟信号传入分析模组中,与预存在分析模组中的声音进行对比,通过数模转换器将音差转换成数字信号,传入机械调音模块,使用两组机械臂进行压弦和调整引脚工作。
6.所述的装置固定限位模块通过一组限位板顶胶将限位板固定钢琴底部,再将调音机器人底部滚轮顶定在限位板,再通过机器人底部滚轮内的伸缩杆伸出一定长度,达到固定机器人的目的。
7.所述的智能音准分析模块通过一组机械按键手臂上的敲击橡胶击打琴键,通过采音器采集琴音,将其传入分析模组,与预存再模组内的音色进行对比,将音域差距通过数模转换器输出至前端机械手臂进行调音。
8.所述的机械调音模块由两组机械调音手臂组成,调音手臂通过视觉相机识别探头检测机械手臂所处位置,通过所述的智能音准分析模块输出的信号两组机械手臂进行配合作业,左侧机械臂通过旋转夹紧伺服电机转动调弦夹件对引脚调整,右侧机械臂根据琴键类型进行按弦操作。
附图说明
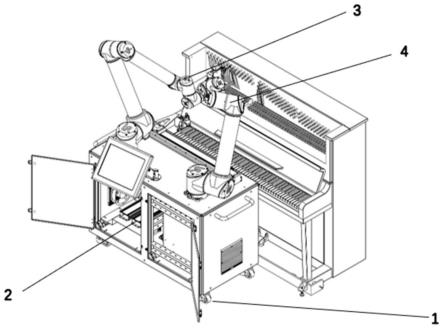
9.图1调弦机器人总装图
10.图2装置固定限位模块底部细节局部图
11.图3顶部机器人敲击组件细节局部图
12.图4调音机器人声音分析模组图
13.图5左侧机械手臂前端细节图
14.图6右侧机械手臂前端细节图
具体实施方式
15.本发明解决了现有钢琴人工调音的成本,通过智能识音系统结合机械手臂调整琴音技术,降低现有人工调整钢琴琴音复杂度,提高调音效率,实现检测音准与调音全自动化。
16.本发明的功能是对钢琴进行智能调音,因此设备的配件根据钢琴设计规范进行调整。本发明主要原理如图1所示,包括装置固定限位模块(1)、智能音准分析模块(2)、机械调音模块。所述的装置固定限位模块(1)工作原理如图2所示,将限位板顶胶(1-1)固定在钢琴左右两侧底部,再将限位板(1-2)固定在整个钢琴上,之后将智能调音机器人的顶轮(1-3)与限位板(1-2)相切,使得智能调音机器人可以通过脚轮(1-4)进行平行移动,当移动到固定位置时,调音机器人通过脚轮(1-4)里面的圆柱形伸缩杆(1-5)进行固定,通过将伸缩杆(1-5)伸出一定的距离,将调音机器人顶高,达到固定的目的。起初将调音机器人固定初始位置后,此处为低音区,将进行智能音准分析模块的工作,如图3所示,在装置固定限位模块(1)在初始位置固定后,本发明的敲击橡胶(2-2)刚好落在钢第一个琴键键位,该模块通过敲击伸缩杆(2-1)带动敲击橡胶(2-2),此时直线模组滑块(2-3)位于直线模组轨道(2-4)最左侧,敲击装置前通过敲击装置固定板(2-5)连接,敲击装置固定板(2-5)连接在直线模组滑块(2-3)上,装个敲击装置在直线模组滑块(2-3)向左移动的过程中带动敲击橡胶(2-2)移动,每次移动的距离为每个琴键之间的距离,保证敲击橡胶(2-2)对每个琴键都能准确敲击琴键,然后通过采音器(2-6)采集琴音,通过采音器(2-6)将声音转成模电信号传入分析模组(2-7)中,将其与预存在分析模组(2-7)中的琴音进行比对音域差值,将差值转成数字信号传入机械调音模块,进行调音操作。如图5所示,在进行机械手臂调音之前,先进行机械手臂定位操作,通过前端视觉相机(3-1)识别引脚(3-3)位于琴板平面位置,通过激光测距仪(3-5)识别机械臂前端与引脚(3-3)之间的距离,获得定位数据后,将调弦夹件(3-2)调节到琴板上夹住引脚(3-3)进行调音操作,考虑到琴键连接的弦与引脚的在低音区配对为一对一,本发明设置对应的琴弦调音时,此时调音机器人右臂(4)不对琴键的弦做任何操作,左侧机械臂前端通过旋转夹紧伺服电机(3-4)旋转一定角度,通过视觉相机(3-1)识别引脚位置,将调弦夹件(3-2)到达引脚位置,然后前伸夹住引脚(3-3)进行调音。当敲击橡胶(2-2)到达中音区之后的琴键区,此时一个琴键对应两根或三根琴弦,此时,需要调音机器人右臂前端视觉相机(4-1)识别和激光测距仪(4-5)定位引脚与琴弦的位置,然后通过按弦组件(4-2)前端的橡胶凹槽(4-3)按住其中一根或两根琴弦,通过敲击橡胶(2-2)敲击琴键,通过智能音准分析模块(2)将信号传输至机械臂左端,左端机械臂通过视觉相机(3-1)和激光测距仪(3-5)到达指定引脚位置,通过旋转夹紧伺服电机(3-4)带动调弦夹件(3-2),使其夹紧引脚(3-3),通过转动调弦夹件(3-2)调整琴音。本发明所述的按弦组件(4-2)为两组,两组之间最大距离满足两根琴弦之间距离,可以同时按住一根或者两根琴弦,进行调音。
17.本发明的直线模组轨道(2-4)为直线模组滑块(2-3)移动轨道,考虑到调音机器人
携带方便等问题,设计时不易过大,因此直线模组滑块(2-3)的有效移动距离为半组琴键,当直线模组滑块(2-3)移动至最右侧时,调音机器人完成半组琴键调音,之后直接回到直线模组轨道(2-4)最左侧,调音机器人底部脚轮(1-4)内的圆柱形伸缩杆(1-5)收回,调音机器人向右移动,使敲击橡胶(2-2)落于上一轮最后琴键上,重新执行上述步骤,直线模组滑块(2-3)再次从左侧滑动至右侧,完成整架钢琴的调音工作。
18.本发明说明书中未作详细描写的内容属于本领域技术人员的公知技术。
技术特征:
1.一种钢琴调音机器人,其特征在于包括:装置固定限位模块(1)、智能音准分析模块(2)、机械调音模块,其中智能音准分析模块(2)与机械调音模块基于装置固定限位模块(1)进行操作,当装置固定限位模块(1)固定后,智能音准分析模块(2)通过采集器(2-6)采集琴音,通过分析模组(2-7)将琴音差转成数字信号传输至机械调音模块,通过机械臂前端的调弦夹件(3-2)和按弦组件(4-2)调整琴音。2.根据权利要求1所述的一种钢琴调音机器人,其特征在于:所述的装置固定限位模块(1)通过限位板顶角(1-1)固定限位板(1-2),将调音机器人前部顶轮(1-3)与限位板(1-2)相切;所述的装置固定限位模块(1)通过底部脚轮(1-4)移动,通过内部圆柱形伸缩杆(1-5)顶出将调音机器人抬高方式,固定调音机器人位置。3.根据权利要求1所述的一种钢琴调音机器人,其特征在于:所述的智能音准分析模块(2)由前端敲击橡胶(2-2)与敲击伸缩杆(2-1)敲击琴键,侧端连接采音器(2-6)采集琴音,后部由敲击装置固定板(2-5)固定,位于直线模组滑块(2-3)上,在直线模组长板(2-4)上整体移动,进行琴键敲击和声音采集工作。4.根据权利要求1所述的一种钢琴调音机器人,其特征在于:所述的智能音准分析模块(2)由后端分析模组(2-7)分析前端采音器(2-6)传入的琴音,将音色差距转成数字信号传至机械调音模块。5.根据权利要求1所述的一种钢琴调音机器人,其特征在于:所述的机械调音模块由左侧和右侧机械臂组成,左侧机械臂(3)前端连接一组旋转夹紧伺服电机(3-4),再连接调弦夹件(3-2),通过其左侧的视觉相机(3-1)和激光测距仪(3-5)定位引脚与弦位置,固定琴弦,夹紧引脚,进行调整;右侧机械臂(4)前端连接一组旋转夹紧伺服电机(4-4),通过敲击橡胶(2-2)敲击所处位置琴键以及视觉相机(4-1)、激光测距仪(4-5),带动按弦组件(4-2)前端的橡胶凹槽(4-3)到达指定琴弦位置,对钢琴的琴弦实行按压操作;配合调弦夹件(3-2)调整琴音;按弦组件(3-4)前端的橡胶凹槽(3-5)按住其中一根或两根琴弦,通过敲击橡胶(2-2)敲击琴键,通过智能音准分析模块(2)将信号传输至机械臂左端,左端机械臂通过视觉相机(3-1)和激光测距仪(3-7)到达指定引脚位置,通过旋转夹紧伺服电机(3-6)带动调弦夹件(3-2),使其夹紧引脚,通过转动调弦夹件(3-2)调整琴音。
技术总结
一种钢琴调音机器人,包括装置固定限位模块(1)、智能音准分析模块(2)、机械调音模块。本发明通过装置固定限位模块(1)调节定位调音机器人行走位置,通过敲击琴键,采集识别音域,通过智能音准分析模块(2)分析琴音准确性,通过机械调音模块按压琴弦,机械调音模块调节引脚校准琴音,有效地提高了琴音调整的准确性,本发明降低调整琴音门槛,既保证音准的同时,又能降低调音的成本,提高调音速度。提高调音速度。提高调音速度。
技术研发人员:左国玉 李镇圻 兰笑语 梁雅婷
受保护的技术使用者:北京工业大学
技术研发日:2022.11.18
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。