1.本发明涉及数字化加工设备相关技术领域,具体一种涉及双机器人镜像钻铆系统。
背景技术:
2.现代飞机制造对于飞机的整体寿命要求越来越高,而影响飞机使用寿命的主要因素则来自于机体的疲劳失效问题,而疲劳失效问题80%来自于结构连接部位,因此连接质量极大的影响着飞机的安全和寿命。
3.目前飞机装配过程中的连接方式主要以人工铆接方式为主,手工钻铆过程通常为两人配合,两人分别位于蒙皮侧与长桁侧,分别负责制孔与顶铆,其优势在于灵活性高,但制孔铆接质量、一致性和效率存在一定限制,而且在制孔铆接过程中的制孔废屑、粉尘,铆接噪音,均会对人体健康带来伤害。
技术实现要素:
4.本发明的目的在于克服上述不足问题,提供一种双机器人镜像钻铆系统。
5.本发明为实现上述目的所采用的技术方案是:双机器人镜像钻铆系统,包括长桁侧机器人、蒙皮侧机器人,所述长桁侧机器人、蒙皮侧机器人分别对应设置在零件固定工装的两侧,所述长桁侧机器人连接有长桁侧控制器,所述蒙皮侧机器人连接有蒙皮侧控制器,所述长桁侧机器人上安装有顶铆末端执行器,所述蒙皮侧机器人上安装有钻铆末端执行器。
6.所述长桁侧控制器、蒙皮侧控制器均与电气集成操作台电路连接。
7.所述蒙皮侧机器人行程范围内设置有自动换刀刀库、钉箱,所述自动换刀刀库与电气集成操作台电路连接。
8.所述蒙皮侧机器人连接有制孔主轴水冷机,所述制孔主轴水冷机与电气集成操作台电路连接。
9.本发明的特点是:将工业机器人与高精度数字化钻铆末端执行器进行融合,通过长桁侧机器人、蒙皮侧机器人,双机协同镜像动作,实现与人工制孔相同的制孔顶铆动作,替代了人工制孔铆接工作,提升了飞机零件装配连接质量,降低人员工作强度,及患职业病风险。
附图说明
10.图1是本发明的结构示意图一。
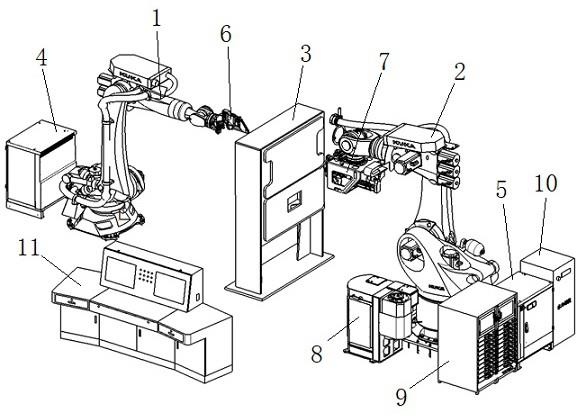
11.图2是本发明的结构示意图二。
12.其中:1、长桁侧机器人
ꢀꢀ
2、蒙皮侧机器人
ꢀꢀ
3、零件固定工作
ꢀꢀ
4、长桁侧控制器
ꢀꢀ
5、蒙皮侧控制器
ꢀꢀ
6、顶铆末端执行器
ꢀꢀ
7、钻铆末端执行器
ꢀꢀ
8、自动换刀刀库
ꢀꢀ
9、钉箱
ꢀꢀ
10、制孔主轴水冷机
ꢀꢀ
11、电气集成操作台。
具体实施方式
13.如图1、2所示,本发明为一种双机器人镜像钻铆系统,主要完成制孔和铆接工作,包括长桁侧机器人1、蒙皮侧机器人2,所述长桁侧机器人1、蒙皮侧机器人2分别对应设置在零件固定工装3的两侧,所述长桁侧机器人1连接有长桁侧控制器4,所述蒙皮侧机器人2连接有蒙皮侧控制器5,所述长桁侧机器人1上安装有顶铆末端执行器6,所述蒙皮侧机器人2上安装有钻铆末端执行器7,所述蒙皮侧机器人2行程范围内设置有自动换刀刀库8、钉箱9,所述蒙皮侧机器人2连接有制孔主轴水冷机10,所述长桁侧控制器4、蒙皮侧控制器5、自动换刀刀库8、制孔主轴水冷机10均与电气集成操作台11电路连接,所述长桁侧机器人1、蒙皮侧机器人2完成移动精确定位任务,所述顶铆末端执行器6、钻铆末端执行器7完成制孔加工铆接任务,整套系统以双机器人协同的方式实现双侧压紧的精密制孔与双侧铆接,亦可通过单机器人独立完成单侧压紧的自动制孔加工,在协同状态中,双机器人步调一致,具有高精度定位同步功能。
14.工作时,长桁侧机器人1带动顶铆末端执行器6,运动至零件固定工装3处长桁制孔位置,同时蒙皮侧机器人2带动钻铆末端执行器7运动至零件固定工装3处蒙皮侧制孔位置,钻铆末端执行器7进行制孔法线寻找,并将法线数据传输给长桁侧机器人1,使顶铆末端执行器6,同时对准钻铆末端执行器7制孔法线,两侧分别施加压紧力,开始制孔,制孔结束后自动更换为铆接功能模块进行自动上钉铆接,完成后移动至下一孔位。
15.本发明将工业机器人与高精度数字化钻铆末端执行器进行融合,通过长桁侧机器人、蒙皮侧机器人,双机协同镜像动作,实现与人工制孔相同的制孔顶铆动作,替代了人工制孔铆接工作,提升了飞机零件装配连接质量,降低人员工作强度,及患职业病风险。
16.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
技术特征:
1.双机器人镜像钻铆系统,其特征在于:包括长桁侧机器人、蒙皮侧机器人,所述长桁侧机器人、蒙皮侧机器人分别对应设置在零件固定工装的两侧,所述长桁侧机器人连接有长桁侧控制器,所述蒙皮侧机器人连接有蒙皮侧控制器,所述长桁侧机器人上安装有顶铆末端执行器,所述蒙皮侧机器人上安装有钻铆末端执行器。2.如权利要求1所述的双机器人镜像钻铆系统,其特征在于:所述长桁侧控制器、蒙皮侧控制器均与电气集成操作台电路连接。3.如权利要求2所述的双机器人镜像钻铆系统,其特征在于:所述蒙皮侧机器人行程范围内设置有自动换刀刀库、钉箱,所述自动换刀刀库与电气集成操作台电路连接。4.如权利要求2所述的双机器人镜像钻铆系统,其特征在于:所述蒙皮侧机器人连接有制孔主轴水冷机,所述制孔主轴水冷机与电气集成操作台电路连接。
技术总结
本发明公开了一种双机器人镜像钻铆系统,包括长桁侧机器人、蒙皮侧机器人,所述长桁侧机器人、蒙皮侧机器人分别对应设置在零件固定工装的两侧,所述长桁侧机器人连接有长桁侧控制器,所述蒙皮侧机器人连接有蒙皮侧控制器,所述长桁侧机器人上安装有顶铆末端执行器,所述蒙皮侧机器人上安装有钻铆末端执行器。本发明的特点是:将工业机器人与高精度数字化钻铆末端执行器进行融合,通过长桁侧机器人、蒙皮侧机器人,双机协同镜像动作,实现与人工制孔相同的制孔顶铆动作,替代了人工制孔铆接工作,提升了飞机零件装配连接质量,降低人员工作强度,及患职业病风险。及患职业病风险。及患职业病风险。
技术研发人员:李东栓 武飞 王作东 张丽梅 徐冬 李潇霖
受保护的技术使用者:大连四达高技术发展有限公司
技术研发日:2022.12.07
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。