1.本实用新型涉及一种采用磁编码尺的行车定位系统,属于无线定位技术领域。
背景技术:
2.随着工业自动化的高速发展,实现设备的自动化、无人化控制已逐渐成为趋势,特别是在一些环境恶劣的场合,一些大型设备需要运行轨迹的精准定位。目前,常用的定位系统是用测距电缆定位。然而,电缆的应用也带来诸多不便之处:(1)测距电缆整段编制,整条使用,使用过程中任意位置编线断开,整条电缆都不能使用,只能进行整条更换;(2)一些应用场合,需要定位距离较远,电缆十分笨重,现场实施人员安装较难;(3)目前,电缆的编线大部分都是人工编制,效率低,并且定位测量精度与编线精度息息相关。
3.目前,市面上的磁栅尺由于非接触间隙的关系,并不适合应用于行车定位行业。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺陷,提供一种使用磁编码尺进行精准定位的行车定位系统。
5.为了达到上述目的,本实用新型采用的技术方案如下:
6.一种采用磁编码尺的行车定位系统,包括:
7.测距磁编码尺,其上设有两组磁钢,一组磁钢按照m序列码的编码方式排列,另一组磁钢由n极和s极磁钢等间距排列;
8.智能磁读码器,其上设有若干磁敏霍尔、信号处理装置、显示装置;当智能磁读码器沿测距磁编码尺水平方向来回移动时,磁敏霍尔感应生成的霍尔电势经信号处理装置转换成位置信息发送至显示装置。
9.本实用新型采用由强磁性材料制成的磁钢组成的无源磁编码尺组。磁编码尺可以适用于连续定位或者某位置精准定位的应用场合。当在长距离定位场合时,其中某段磁编码尺损坏或者采集异常,并不影响整段磁编码尺的应用,只需对磁编码尺的异常段进行更换即可。当仅需要某位置精准定位时,只需要在此位置放置一小段磁编码尺,就能实现定位目的。本方案使用磁敏霍尔元件作为信号采集,当磁敏霍尔在磁编码尺水平方向上移动时,产生正弦信号。采集到的正弦信号经转换处理为位置信号后,由显示装置进行显示。此方案实际位置由绝对编码地址和精确地址两部分组成,分别使用磁编码尺上两组以m序列排布的磁钢及以n、s极等间距排列的磁钢。绝对编码地址使用的是m序列编码方式。精确地址通过两个线性霍尔传感器的比值查表,通过比例计算的方案,消除非接触间隙改变带来的误差,适用于对非接触间隙范围要求较宽的定位场合。
10.进一步的,测距磁编码尺包括磁栅源、磁敏霍尔,智能读码器包括放大电路、通道切换、cpu电路、数码管、按键电路和通讯电路,其中磁栅源由不导磁的金属做尺基,由强磁性材料的磁钢组成,并且磁钢分为两组,分别对应绝对编码地址和精准地址对应的排列方式。其中绝对编码地址所对应的磁钢排列方式是由m序列码的排序所决定的。而精确地址是
由n极和s极磁钢等间距排列。磁敏霍尔作为系统的信号采集,其沿着测距磁编码尺方向上移动时,感应生成霍尔电势。此系统使用n个磁敏霍尔,其中n-2组信号作为绝对编码地址的计算,另外2组作为精确地址的计算。
11.进一步的,测距编码尺包含多段标准尺寸长度的磁编码尺,根据实际所需定位长度确定所需段数,各段磁编码尺使用磁编码尺固定件进行多段拼接。
12.进一步地,所述磁敏霍尔感应生成的信号连接至放大电路。放大电路采用仪表放大器,能够对采集到的信号进行放大,便于后续处理器对信号的处理。进一步地,所述放大后的信号进入通道切换电路,依次对n组信号进行切换,切换后的信号直接进入cpu电路中处理器的3个独立adc通道。
13.进一步地,cpu电路处理器中的三个adc接收通道切换后的信号,对通道切换来的信号进行数据的处理,处理器将模拟信号划分为n极、s极和不确定3个区间,通过对信号幅值的判断,将不确定区的信号给排除,消除n极和s极之间边界变化时带来的误差。
14.进一步地,所述数码管和按键电路与cpu电路连接,数码管可以对运动位置进行实时显示,并且通过按键电路可以对进入cpu电路的信号状态、强度以及相位进行查看,通过数码管进行显示。
15.进一步地,cpu电路处理完信号,通过rs485通讯电路与上位机进行通讯,将位置信息以及信号的信息传给上位机,实现位置的连续采集。
16.进一步地,所述cpu电路采用cpu为st32f407系列处理器。
17.进一步地,所述磁敏霍尔数量需根据需求定位距离来选择,磁敏霍尔传感器数量n与定位距离l关系:
18.l=(2n*0.1)m
19.进一步地,实际位置由绝对编码地址和精确地址两部分组合而成。
20.本实用新型具有如下有益效果:
21.1)本实用新型磁编码尺,采用标准长度的码尺放置在整个定位区间,单根码尺的损坏不会影响整个系统的运行,且维修方便,维修人员只需对问题码尺进行更换即可。
22.2)本实用新型采用磁敏霍尔,处理器直接对模拟信号进行计算,将模拟量信号划分为n极、s极、不确定3个区间情况,消除由于采用的无权码引起的误码问题。
23.3)本实用新型精确地址由两个磁敏霍尔信号比值查表确定,通过比例计算的方案,消除非接触间隙改变带来的误差,适用于对非接触间隙范围要求较宽的定位场合。
附图说明
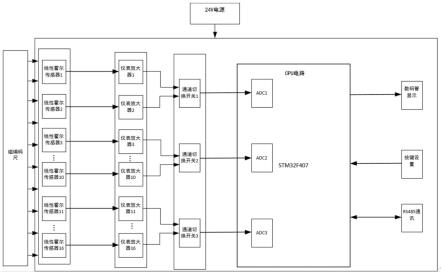
24.图1为本实用新型系统结构示意图;
25.图2为本实用新型采用的测距磁编码尺示意图;
26.图3为本实用新型编码方式示意图;
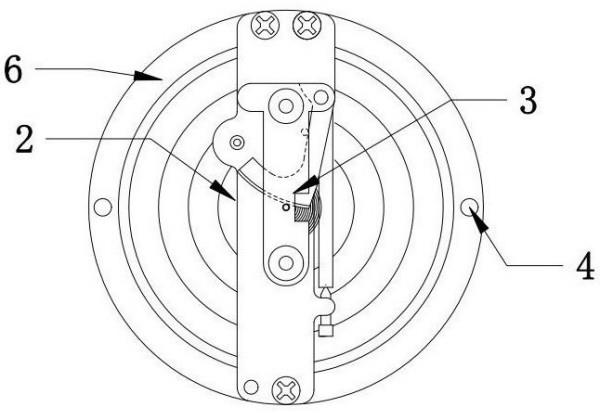
27.图4为本实用新型产品结构示意图。
28.图中,1-智能磁读码器,2-磁编码尺,21-尺基,22-磁钢。
具体实施方式
29.下面结合附图对本实用新型作进一步的说明。
30.如图4所示,本实用新型提供了一种采用磁编码尺的行车定位系统,包括测距磁编码尺2和智能磁读码器1。结合图1,整个系统由外部24v电源供电。智能磁读码器1由磁敏霍尔(即图1所示线性霍尔传感器)、仪表放大器、通道切换开关、cpu电路、数码管、按键设置和rs485通讯电路集成。结合图2,磁编码尺2由不导磁的金属作为尺基21,由强磁材料的磁钢22在空间内产生磁场,当磁敏霍尔沿着磁编码尺2水平方向来回移动时,感应生成霍尔电势。磁敏霍尔产生的霍尔电势信号传送给仪表放大器,仪表放大器将信号进行放大到合适的区间范围,再将信号传送给通道切换开关,通道切换开关将信号依次传输给cpu电路,cpu电路对信号进行处理计算后,通过数码管显示出位置信息。同时,可以通过按键设置(按键电路)查看信号状态和强度信息,并通过数码管显示。最后,通过rs485电路实现与上位机的通讯,将实时位置上传给上位机。
31.通道切换开关传输给cpu电路的信号分为三个部分,分别进入cpu电路的adc1通道、adc2通道和adc3通道。其中adc1通道采集精确地址线性霍尔传感器1和线性霍尔传感器2的比值,进行查表得出精确地址。adc2和adc3通道采集的是除去线性霍尔传感器1和线性霍尔传感器2的其它磁敏霍尔的信号,进行绝对编码地址的计算。
32.如图2所示,本实用新型中的磁编码尺是由不导磁的金属作为尺基21,由强磁材料的磁钢22拼接产生磁场。其中磁钢22为两组,一组磁钢n极和s极的排列方式由m序列码排列方式决定,另一组磁钢n极和s极等间距排列。
33.结合图3,本实用新型中的磁编码分为绝对编码地址和精确地址。其中,绝对编码地址磁钢n极和s极的排列方式由m序列码排列方式决定,比如s极对应“0”,n极对应“1”,图3中,绝对编码地址当前位置的编码即为“0111010111011101”。精确地址是由n极、s极磁钢等间距排列,磁敏霍尔采集到的霍尔电势为正弦波形,如图3中所示,线性霍尔1和线性霍尔2的输出信号,精确地址采用的是线性霍尔1和线性霍尔2两者的比值查表获得。最终,获得的实际位置s即为绝对编码地址s’和精确地址s”组成,即
34.s=s' s"
35.如图4所示,智能磁读码器沿磁编码尺方向移动,且与磁编码尺非接触。在移动的过程中,线性霍尔传感器感应生成霍尔电势,对于生成的霍尔电势直接进入cpu电路处理器进行计算。cpu电路处理器识别霍尔电势判断高低电平,若高电平对应“n极”,则低电平对应“s极”,因此在“n极”移动至“s极”的过程,由于磁场信号强度变弱,会导致在高低电平之间有一段不确定区,在这个区间内,绝对编码地址保持上一次的值,即s’不变,此时通过精确地址s”,实现连续定位,即确定s的值。如图3所示,精确地址使用的是两个霍尔传感器,两者之间距离一定。当线性霍尔传感器1对应“n极”,线性霍尔传感器2对应“s极”,两者的霍尔电势比值为当线性霍尔传感器1对应“s极”,线性霍尔传感器2对应“n极”,两者霍尔电势比值为将两者区间划分为100等分,每一等分对应一个小距离。因此,通过绝对编码地址和精确地址之和即可确定当前行车位置。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。