1.本公开总体上涉及滑板,更具体地涉及多轮滑板底架(multi-wheel skateboard truck)。
2.相关申请数据
3.本技术要求2020年6月29日提交的美国专利申请第63/045,582号和2021年4月30日提交的美国专利申请第63/201,491号的权益,这两个美国专利申请的内容通过引用完全并入本文。
4.背景
5.个人乘用和使用滑板作为一种方便和有娱乐性的交通方式。一般来说,滑板(或其电动版本)比其他自行式交通替代方案具有许多有利的优点,如滑板可以容易地储存、拾取和携带。然而,通常,当使用者在包括(但不是详尽的列表)裂缝、横缝(contraction joints)、膨胀缝(expansion joints)、控制缝(control joints)和隆起的不连续或不平坦的表面上乘用滑板时,轮和不连续表面之间的撞击向滑板施加不希望的力。这种撞击力导致不利的影响,包括噪声、对乘用者的冲击、速度损失和对滑板失去控制,包括翻转和碰撞。本领域需要一种移动轮平台,该移动轮平台最小化轮与不连续和不平坦表面的相互作用,以增强个人的乘用体验和满意度。
6.附图简述
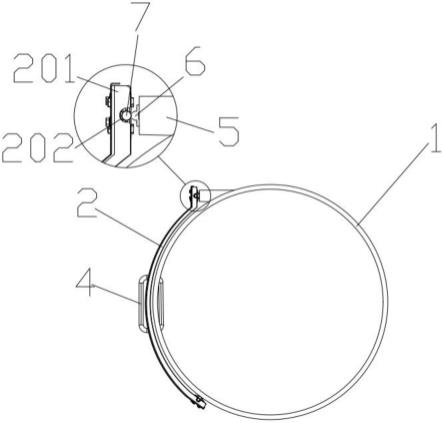
7.图1示出了根据一个实施例的多轮滑板底架的透视图。
8.图2示出了图1的底架的分解图。
9.图3示出了图1的底架的轮组的分解图。
10.图4示出了根据本发明的形成攻角(attack angle)的图1的底架的俯视图。
11.图5从俯视图示出了图3中所示轮组的尺寸和间距。
12.图6从侧视图示出了图3中所示轮组的尺寸和间距。
13.图7示出了根据一个实施例的多轮底架的俯视图,该多轮底架包括以特定接近角接近障碍物的攻角。
14.图8示出了以另一个接近角接近障碍物的图7的多轮底架的俯视图。
15.图9示出了根据图1的实施例的水平臂和相对应的弹簧垫片(spring insert)的分解图。
16.图10示出了图1底架的水平臂、弹簧垫片和悬轴(hanger)的分解图。
17.图11示出了根据多轮底架的一个实施例的弹簧垫片。
18.图12示出了根据多轮底架的替代实施例的弹簧垫片。
19.图13示出了根据多轮底架的另一替代实施例的弹簧垫片。
20.图14示出了根据图1的实施例的底架的悬轴的俯视图。
21.图15示出了图14的悬轴的透视图。
22.图16示出了根据图1的实施例的底架的基板的透视图。
23.图17示出了图1的底架的悬轴和基板组件的分解图。
24.图18示出了根据替代实施例的多轮底架的水平臂的透视图。
25.详细描述
26.i.本发明的核心:
27.本文描述了一种多轮滑板底架,该多轮滑板底架被构造成以各种速度并在宽范围的方向上平稳地穿越各种形状和尺寸的不连续表面。下面给出的是具有底架的多轮滑板实施例,底架提供独特的悬架机构以及辅助轮和中心轮的独特布置,以在不连续表面上提供独特的攻角。独特的悬架系统和底架轮的攻角相结合,以最大限度地减少了轮与障碍物或不连续表面之间相互作用带来的冲击。悬架系统包括多个轮组,其中每个轮组包括中心轮、多个辅助轮和连接轮的可旋转水平臂。辅助轮固定在可旋转水平臂的前部和后部区域116上,并且被构造成随着水平臂响应于障碍物旋转而上下移动。在许多实施例中,悬架系统还包括弹簧机构130,弹簧机构130被构造成约束水平臂的旋转。底架的攻角由每个轮组中的轮的构造形成。具体地,攻角取决于辅助轮相对于中心轮的空间布置。轮空间布置和攻角允许底架在从各个方向接近障碍物时平稳地穿越该障碍物。
28.除了滑板之外,多轮底架还可以用于各种应用。例如,在一些实施例中,底架可以用于独轮手推车(wheelbarrows)、工业手推车(industrial carts)、工业推车(industrial dollies)、商业手推车(commercial carts)、商业推车(commercial dollies)、手推运货车(hand trucks)、堆高车(stack trucks)、滑板底架、长板底架、电动滑板底架、车厢、儿童推车(strollers)和/或行李箱。可替换地,本文描述的装置、方法和制品可应用于需要底架或滑行通过、清扫(hoovers)、和/或移动经过(maneuvers)障碍物或异物(即,岩石、鹅卵石、裂缝、和/或人行道收缩缝)的其他移动轮平台的其他类型的应用。
29.本文使用的术语或短语“连接(connect)”、“连接(connected)”、“连接(connects)”、“连接(connecting)”可被定义为机械地或以其他方式将两个或更多个元件连结在一起。连接(无论是机械的连接还是其它方式的连接)可以持续任何时间长度,例如永久的或半永久的或者只是瞬间的。
30.本文使用的术语或短语“链接(link)”、“链接(linked)”、“链接(links)”、“链接(linking)”可以被定义为两个或更多个元件之间的其中至少一个元件影响另一个元件的关系。链接(无论是机械的链接还是其它方式的链接)可以持续任何时间长度,例如永久的或半永久的或者只是瞬间的。
31.本文使用的术语或短语“固定(secure)”、“固定(secured)”、“固定(secures)”、“固定(securing)”可以定义为牢固地固定或紧固(一个或更多个元件),使得其不能移动或变松。固定(无论是机械的固定还是其它方式的固定)可以持续任何时间长度,例如永久的或半永久的或者只是瞬间的。
32.本文使用的术语或短语“联接(couple)”、“联接(coupled)”、“联接(couples)”、和“联接(coupling)”可以被定义为机械地或以其他方式连接两个或更多个元件。联接(无论是机械的联接还是其它方式的联接)可以持续任何时间长度,例如永久的或半永久的或者只是瞬间的。机械联接等应该被广泛理解,并且包括所有类型的机械联接。在“联接(coupled)”等词语附近没有“可移除地”、“可移除的”等词语并不意味着所讨论的联接是或不是可移除的。
33.本文使用的术语或短语“滑板”可以被定义为可乘用的装置。滑板可以由四个不同
的部分来定义。滑板的顶部部分被定义为板面的用户站在上面的部分。滑板的底部部分被定义为与顶部部分相对的部分。按惯例,右脚使用者的姿势被定义为左脚在右脚的前面。滑板的前部部分被定义为靠近使用者的左脚。滑板的后部部分被定义为靠近使用者的右脚。向前方向被定义为当右脚在地面上向后推动以使滑板向相反方向移动时的滑板的行进方向。类似地,当本发明的多轮底架附接到所述滑板的板面上时,多轮底架的前部部分可以被定义为底架的设置成最靠近滑板的前部部分的部分,并且底架的后部部分可以被定义为底架的设置成最靠近滑板的后部部分的部分。
34.本文使用的术语或短语“地面”或“滚动表面”可以被定义为滑板的轮通常在其上滚动的表面。在滑板的典型操作过程中,地面或滚动表面被认为是大致光滑的表面。然而,在某些位置,地面或滚动表面可能包括使地面或滚动表面的一部分不光滑的不连续或障碍物,例如裂缝、隆起、伸缩缝、或异物。
35.在说明书和权利要求书中的术语“第一”、“第二”、“第三”、“第四”及类似术语(如果有的话)用于在类似的元件之间进行区分,而不一定用于描述特定的顺序的或时间的次序。应理解,这样使用的术语在适当的情况下是可互换的,使得本文中所描述的实施例例如能够以除了本文中所图示或以其他方式描述的那些顺序以外的顺序来操作。此外,术语“包括”和“具有”及其任何变型旨在涵盖非排他性的包含,使得包括元件列表的过程、方法、系统、物品、设备、或装置不必然限于那些元件,而是可以包括没有明确列出的或者这样的过程、方法、系统、物品、设备、或装置固有的其它元件。
36.在说明书中和在权利要求中的术语“左”、“右”、“前”、“后”、“顶”、“底”、“在......上方”、“在......下方”及类似术语(如果有的话)用于描述的目的且不一定用于描述永久的相对位置。应理解,这样使用的术语在适当的情况下是可互换的,使得本文中所描述的设备、方法和/或制造物品的实施例例如能够在除了在本文中所图示或以其他方式描述的那些定向以外的其他定向上操作。
[0037]“一(a)”、“一(an)”、“该(the)”、“至少一个”、和“一个或更多个”可互换地使用,以指示所述项目中的至少一个存在;除非上下文清楚地另外指示,否则可以存在多个这样的项目。本说明书(包括所附权利要求书)中参数(例如,量或条件)的所有数值应理解为在所有情况下以术语“大约”修饰,而无论“大约”是否实际上出现在数值之前。“大约”表示所述数值允许一些轻微的不精确(在数值上某种程度接近精确;大约或合理地接近数值;几乎)。如果以“大约”提供的不精确性在本领域中不能以这种普通的含义理解,那么本文使用的“大约”至少表示可能由测量和使用这种参数的普通方法引起的变化。此外,公开范围包括公开所有值以及在整个范围内进一步划分的范围。在此,在范围内的每个值和范围的端值都被公开为单独的实施例。术语“包括(comprises)”、“包括(comprising)”、“包含(including)”、和“具有(having)”是包容性的,且因此指定了所述项目的存在,但不排除其他项目的存在。如本文所使用的,术语“或”包括所列的项中的一个或更多个项的任意组合和所有组合。当术语第一、第二、第三等被用来在各个不同的项目间进行彼此区分时,这些指定仅仅是为了方便,并不将项目限制在特定的顺序或次序。
[0038]
在本文使用的许多示例中,当将一个或更多个值、值的范围、关系(例如,位置、取向等)或参数(例如,速度、加速度、质量、温度、旋转速率、旋转方向等)与一个或更多个其他值、值的范围或参数时,和/或当描述条件(例如,关于时间)时,例如,关于时间保持恒定的
条件时,可以使用术语“大约”)。在这些示例中,使用单词“大约”可以意味着值、值的范围、关系、参数或条件在相关值、值的范围、关系、参数或条件的
±
0.5%、
±
1.0%、
±
2.0%、
±
3.0%、
±
5.0%、和/或
±
10.0%内(如适用)。
[0039]
在本公开的任何实施例被详细说明之前,要理解的是,本公开在其应用方面不限于在下面的描述中阐述或在附图中所图示的结构的细节和部件的布置。本公开能够有其他实施例并且能够以各种方式被实践或被执行。
[0040]
下面描述的是多轮底架的实施例。图1-图2示出了底架100的实施例,其包括独特的悬架系统和攻角α,以允许底架100平稳地通过不连续的表面。通常,底架100包括多个轮组,轮组包括旋转水平臂110和多个轮。底架100还包括用于连接多个轮组的悬轴102。底架100还包括基板170,基板170被构造成接收悬轴102并将底架100连接到滑板板面(未示出)的下侧。下面将较详细地描述悬轴102和基板170的布置。
[0041]
ii.悬架系统
[0042]
多个轮组形成悬架系统,该悬架系统在与障碍物撞击时吸收不希望的冲击,并提供越过这种障碍物的平稳乘用。图3示出了根据本发明底架100的轮组。在许多实施例中,每个轮组包括联接到中心轴108的可旋转水平臂110、可旋转联接到中心轴108的至少一个中心轮120、以及通过多个辅助轴联接到水平臂110的多个辅助轮。在许多实施例中,每个轮组包括一个中心轮120和两个辅助轮,两个辅助轮包括前轮122和后轮124。在许多实施例中,底架100包括一对轮组,一对轮组位于底架100的两侧并固定到悬轴102的相对的端部。在许多实施例中,一对轮组中的每一个轮组固定到悬轴102的任一端并且沿着从悬轴102的第一端104延伸到悬轴102的第二端106的纵向轴线1000放置。
[0043]
中心轴108可以联接到悬轴102的一端,并被构造成将中心轮120和可旋转的水平臂110两者固定到其上。中心轴108可以被形成在悬轴102的端部内的空隙156接收,并固定地联接在空隙156中。在许多实施例中,中心轮120形成孔。该孔被设定尺寸成允许中心轮120联接到中心轴108并围绕中心轴108自由旋转。这允许滑板在使用期间沿着中心轮120平稳且安全地滚动。
[0044]
水平臂110也可旋转地联接到中心轴108。水平臂110包括设置在底架100的前部附近的前部区域112(即底架100最靠近滑板前部的部分)、以中心轴108为中心的中间区域114、以及与前部区域112相对并靠近底架100后部设置的后部区域116。中间区域114包括中间孔115,中间孔115基本上位于水平臂110的中心并且被构造成同心地链接、附接、和/或联接中心轴108。中间孔115允许水平臂110联接到中心轴108并围绕中心轴108旋转。在所示实施例中,辅助轮通过多个辅助轴126、128附接在水平臂110的任一端。如图3所示,前部区域112被构造成接收前轮122。前部区域112包括前孔113,前孔113被构造成同心地链接、附接、和/或联接前辅助轴126(以下称为“前轴”)。前轴126固定地联接在前孔113内,使得前轴126被限制相对于水平臂110旋转。前轮122被构造成固定到前轴126上并允许在所述前轴126上自由旋转。如图3所示,后部区域116构造成接收后轮124。后部区域116包括后孔117,后孔117被构造成同心地链接、附接、和/或联接后辅助轴128(以下称为“后轴”)。后轴128固定地联接在后孔117内,使得后轴128被限制相对于水平臂110旋转。后轮124构造成固定到后轴128上并允许在所述后轴128上自由旋转。通过多个辅助轴126、128附接到水平臂110的任一端的前轮122和后轮124的构造允许前轮122和后轮124在滑板的使用期间沿着地面自由滚
动。当水平臂110围绕中心轴108旋转时,附接前轮122和后轮124的辅助轴126、128的位置允许前轮122和后轮124向上或向下移动。
[0045]
悬架系统产生“提升作用”,该“提升作用”提供底架100在滚动表面中的障碍物或不连续上的平稳通过。当底架100沿着地面滚动时,水平臂110可以响应于表面中的不连续而旋转。水平臂110的旋转允许水平臂110的任一端上的辅助轮根据滚动表面的地形升高或降低。辅助轮响应障碍物升高或降低的自由度用于吸收通常与轮和这种障碍物之间的撞击相关联的冲击。
[0046]
提升作用还用于在使用过程中在中心轮和辅助轮之间动态分配载荷,以提供更平稳的乘用。在滑板沿着光滑表面滚动的正常使用期间,中心轮120可以支撑乘用者的大部分重量。然而,当中心轮120遇到诸如裂缝之类的障碍物时,前轮122和/或后轮124可以承受乘用者的大部分重量以保持底架100稳定。例如,在与滚动表面中的裂缝撞击时,前轮122首先遇到裂缝。当前轮122处于裂缝中时,水平臂110可以旋转以将前轮122降低到裂缝中。同时,滑板的大部分载荷由中心轮120支撑,中心轮120继续沿着主滚动表面滚动。当前轮122离开裂缝时,中心轮120可以进入裂缝。水平臂110可以旋转以升高前轮122并允许其继续沿着主滚动表面滚动。中心轮120可以通过水平臂110悬架在裂缝上方,而不是落入裂缝中并导致板减速或对乘用者造成冲击。因为水平臂由在光滑滚动表面上滚动的前轮122和后轮124支撑在任一端,所以滑板的基本上全部载荷被支撑在辅助轮之间,并且很少或没有载荷被中心轮120承载。当中心轮120离开裂缝时,后轮124可以进入裂缝。当后轮124处于裂缝中时,水平臂110可以旋转以将后轮降低到裂缝中。同时,板的大部分载荷由中心轮120支撑,中心轮120再次沿着主滚动表面滚动。因为至少有一个轮沿着主滚动表面滚动并在任何给定时间支撑乘用者的大部分重量,所以悬架系统通过允许轮组充当沿着光滑表面连续滚动的单个轮来为底架100提供稳定性。
[0047]
iii.攻角
[0048]
底架100还包括多个轮之间的空间布置,多个轮与悬架系统一起工作以提供对障碍物和不连续表面的平滑穿越。轮的空间布置使得无论滑板以何种角度遇到障碍物,悬架系统的提升作用都能够发生。在许多实施例中,中心轮和辅助轮都横向地(即相对于沿着纵向轴线1000延伸的方向)和沿前后方向间隔开。轮的这种空间布置为底架100提供了宽底座,并防止每个给定轮组内的轮同时撞击障碍物。因此,在任何给定时间,每个给定轮组中总是有至少一个轮在主滚动面上支撑乘用者的重量。给定轮组内的轮之间的空间关系可以用攻角α来表征,这在下面将详细描述。
[0049]
攻角α是底架100的中心轮和辅助轮之间的空间关系的表征。如图4所示,攻角α可定义为连接特定轮组的中心轮120和前轮122的第一参考线a与平行于纵向轴线1000延伸的第二参考线b之间的锐角。第一参考线a可以连接位于前轮122上的第一参考点r1和位于中心轮120上的第二参考点r2。第一参考点r1是前轮122的最前面且最外面(即相对于悬轴102相距最远)的参考点。类似地,第二参考点r2是中心轮120的最前面且最外面的点。前轮和中心轮120的不同构造可以改变第一参考点r1和第二参考点r2之间的关系,从而改变第一参考线a的方向性。
[0050]
因为攻角α与第一参考点r1和第二参考点r2的位置相关,所以攻角α取决于中心轮120和前轮122的尺寸和位置。具体地,中心轮120和前轮122在以下方面的不同特定构造产
生不同的攻角α:中心轮120和前轮122之间的横向间距、中心轮120和前轮122之间的前后间距、中心轮120和前轮122的宽度以及中心轮120和前轮122的直径。以这种方式,可以通过改变前轮和中心轮120之间的空间关系和/或通过改变前轮122和中心轮120的直径和/或宽度来操纵攻角α。例如,在前轮122和中心轮120之间提供较大的横向距离产生较平缓(shallower)的攻角α,而在前轮122和中心轮120之间提供较小的横向距离产生较陡的攻角α。类似地,改变轮组内的一个或更多个轮的直径和/或宽度改变第一参考点r1和/或第二参考点r2的位置,这又会改变第一参考线a的取向。多个轮的直径和宽度将在下面进一步详述。
[0051]
在许多实施例中,中心轮120与多个辅助轮横向间隔开以产生攻角α。通常,多个辅助轮包括“直列式(inline)”构造,其中前轮122和后轮124从底架100的前部到后部定位在一条直线上。中心轮120相对于辅助轮不排成一直线,而是与辅助轮横向间隔开。在许多实施例中,如图5所示,中心轮120比辅助轮更横向远离悬轴102,使得辅助轮位于中心轮120和悬轴102之间。在替代实施例(未示出)中,中心轮120可以比辅助轮更横向靠近悬轴102,使得中心轮120位于辅助轮和悬轴102之间。辅助轮(特别是前轮122)和中心轮120之间相对于彼此的横向间距可以由一对平面之间的距离来表征。前轮122和中心轮120可以各自位于在纵向方向上分开特定距离的相应平面上。图5示出了沿前后方向延伸穿过中心轮120的中心的第一平面2000。类似地,示出了第二平面3000,其中第二平面3000沿前后方向(因此平行于第一平面2000)延伸穿过前轮122的中心。在许多实施例中,第一平面2000和第二平面3000之间的距离p1约为2.0英寸。在一些实施例中,第一平面2000和第二平面3000之间的距离p1可以在大约0.5英寸和3.0英寸之间的范围内。在一些实施例中,第一平面2000和第二平面3000之间的距离p1的范围在大约0.5英寸和1.0英寸之间、在大约1.0英寸和1.5英寸之间、在大约1.5英寸和2.0英寸之间、在大约2.0英寸和2.5英寸之间、或者在大约2.5英寸和3.0英寸之间。平面2000和平面3000之间的距离形成其中中心轮120与辅助轮横向间隔开的一个轮组。这种构造为轮组产生了所需的攻角α和宽底座。
[0052]
攻角α还由相邻轮之间的前后距离决定。图6示出了在前轮122和中心轮120之间限定的前后距离192,其中距离192被测量为每个轮附接其上的轴(即前轴126和中心轴108的轴)之间的垂直距离。类似地,中心轮120和后轮124之间的前后距离194可以被测量为每个相应的轮附接在其上的中心轴108和后轴128之间的垂直距离。在许多实施例中,当前轮122和后轮124固定在水平臂110的任一端附近时,相邻轮之间的前后距离192、194取决于水平臂110的前后长度。
[0053]
在许多实施例中,任何相邻的一对轮之间的前后距离可以是大约1.5英寸。在一些实施例中,任何相邻的一对轮之间的前后距离可以在大约0.5和2.5英寸之间。在一些实施例中,相邻的轮之间的前后距离可以在0.5和1.0英寸之间、在1.0和1.5英寸之间、在1.5和2.0英寸之间、或在2.0和2.5英寸之间。在一些实施例中,相邻的轮之间的前后距离可以在0.5和0.75英寸之间、在0.75和1.0英寸之间、在1.0和1.25英寸之间、在1.25和1.5英寸之间、在1.5和1.75英寸之间、在1.75和2.0英寸之间、在2.0和2.25英寸之间、或在2.25和2.5英寸之间。在许多实施例中,前轮122和中心轮120之间的前后距离192可以基本上类似于中心轮120和后轮124之间的前后距离194。在其他实施例中,前轮122和中心轮120之间的前后距离192可以基本上不同于中心轮120和后轮124之间的前后距离194。相邻的轮之间的前后
距离部分地确定第一参考点r1和第二参考点r2的位置,且因此影响攻角α。
[0054]
中心轮120和前轮122在间距和每个轮的尺寸方面的构造限定了底架100的攻角α。在许多实施例中,30度和60度之间的攻角α是期望的,以允许底架100能够以最宽的角度范围平稳地穿越障碍物。在许多实施例中,本发明的底架100的攻角α约为45度。在一些实施例中,攻角α在大约30度和60度之间。在一些实施例中,攻角α在大约30度和35度之间、在大约35度和40度之间、在大约40度和45度之间、在大约45度和50度之间、在大约50度和55度之间、或者在大约55度和60度之间。在其它实施例中,攻角α在大约30度和32度之间,在大约32度至34度之间、在大约34度至36度之间、在大约36度至38度之间、在大约38度至40度之间、在大约40度至42度之间、在大约42度至44度之间、在大约44度至46度之间、在大约46度至48度之间、在大约48度至50度之间、在大约50度至52度之间、在大约52度至54度之间、在大约54度至56度之间、在大约56度至58度之间、或在大约58度至60度之间。
[0055]
优化的攻角α增强了底架100在以宽角度范围接近不同大小的障碍物的同时平稳地穿越这些障碍物的能力。如图7和图8所示,当滑板接近障碍物190时,可以在底架100和障碍物190之间限定接近角β。接近角β可以定义为障碍物190和滑板行进方向之间的锐角。更具体地,接近角β由参考线c和第二参考线d形成,参考线c对应于底架100撞击障碍物190时的行进方向,第二参考线d在撞击点处与障碍物190相切。例如,滑板接近长形障碍物190的“正对(straight on)”将限定近似90度的接近角β,而滑板从除直行以外的任何方向接近障碍物190将限定基本上小于90度的接近角β。
[0056]
底架100的攻角α允许底架100相比于常规的滑板以更宽范围的接近角β平稳地穿越障碍物和不连续表面。因为中心轮120和前轮122横向间隔开以形成攻角α,所以底架100基本上包括比具有直列轮构造的类似板或不形成攻角的常规滑板更宽的底座。攻角降低了组中多个轮同时撞击障碍物的可能性。这通过允许每个轮组中的至少一个轮在任何给定时间接触规则滚动表面来提供在具有各种尺寸和取向的障碍物上的平衡和稳定性。换言之,攻角α允许在宽范围的接近角β下产生提升作用。
[0057]
当本发明的底架100在任何接近角β下遇到障碍物时,由乘用者的重量产生的负荷可以在前后方向以及横向方向上在中心轮和辅助轮之间转移。这种构造为本发明的底架100提供了比常规滑板底架多两级的稳定性,常规滑板底架仅包括在底架100的任一侧上的单个轮。当常规底架遇到障碍物时,由乘用者的重量产生的载荷不能从轮转移,且因此轮承受与障碍物的全部冲击力。相反,在中心轮120和辅助轮之间转移载荷的能力允许本发明的底架100吸收与障碍物的冲击力。由于底架100的攻角α而在多个方向上转移载荷的能力提供在较宽范围的接近角β内对该力的更大的吸收。
[0058]
由于前轮122和后轮124在水平臂110上围绕中心轴108旋转时的提升,提升作用允许底架100平稳地穿越障碍物。然而,在一些情况下,例如当滑板被携带而不是被乘用时,可能希望选择性地限制水平臂110的旋转。这样做可以在滑板被携带时防止水平臂110自由地前后摆动,前后摆动会导致轮猛烈撞击滑板的下侧。现在参考图9-图10,水平臂110可包括弹簧机构130,该弹簧机构130提供一定量的机械干涉以控制水平臂110围绕轴的旋转。在许多实施例中,弹簧机构130可以包括形成在水平臂110内并被构造成接收弹簧垫片140的垫片凹槽132。弹簧垫片140可以被构造成与底架100的一个或更多个部件接合并协同工作,以产生“弹簧效应”,该“弹簧效应”在特定载荷下提供对水平臂110旋转的阻力。垫片凹槽132
可以形成在水平臂110的中间区域114内,并且可以围绕水平臂110的中间孔115居中。以这种方式,中间孔115可以延伸穿过垫片凹槽132的一部分,并且中心轴108可以延伸穿过整个垫片凹槽132。优选地,垫片凹槽132从水平臂110的面向内的表面(即当水平臂110固定到中心轴108时水平臂110面向悬轴102的一侧)向内形成。弹簧垫片140的位置和取向被提供成朝向悬轴102的端部暴露相对应的弹簧垫片140,弹簧垫片140将接合悬轴102的端部的几何结构以产生期望的弹簧效应。
[0059]
垫片凹槽132可以接收弹簧垫片140,弹簧垫片140被构造成产生约束水平臂110围绕轴的旋转的弹簧效应。弹簧垫片140可以通过使用诸如螺钉或卡扣配合机构的机械紧固件、通过使用粘合剂、或通过它们的组合而固定在凹槽内。弹簧垫片140被设计成在滑板被携带时提供对抗水平臂110的旋转的一定量的阻力以保持水平臂110的定位。当滑板在空中被携带时,保持水平臂110的定位保护了滑板,这是通过防止辅助轮猛烈撞击滑板板面实现的。弹簧垫片140可以被构造成限制水平臂110在相对较轻的载荷下旋转,同时允许水平臂110在相对较重的载荷下旋转。例如,弹簧垫片140可以在通常与用户携带滑板相关联而不与用户乘用滑板相关联的轻载荷下限制水平臂110的旋转。弹簧垫片140还可以允许水平臂110在滑板在障碍物上被乘用时所承受的重载荷下旋转。
[0060]
在许多实施例中,如图9和图10所示,弹簧垫片140是单个的、基本平坦的件,并且被构造成对应于垫片凹槽132的形状,使得弹簧垫片140齐平地位于垫片凹槽132内。弹簧垫片140可以由诸如注塑塑料的大致柔性的材料形成。弹簧垫片140可由以下任何一种或组合构成:尼龙、聚丙烯、聚乙烯、热塑性树脂、热塑性聚氨酯、热固性树脂、芳族二异氰酸酯、甲苯二异氰酸酯(tdi)、亚甲基二苯基二异氰酸酯(mdi)、丙烯腈丁二烯苯乙烯(abs)、乙缩醛、钢、钢合金、或任何适于提供具有所需几何结构和性能的弹簧垫片140的材料。弹簧垫片140最好由具有高伸长率的材料形成。高伸长率允许弹簧垫片140容易地挠曲和“反弹”。高伸长率材料允许弹簧垫片140响应于与底架100的使用相关联的力而挠曲和弯曲。
[0061]
在许多实施例中,弹簧垫片140被构造成接合悬轴102的一部分。如图10所示,悬轴102包括在第一端和第二端中的每一个上的肩部(shoulder)150,中心轴108附接在该肩部150处。弹簧垫片140被设置在水平臂110内使得弹簧垫片140被安装在悬轴102的肩部150上。肩部150和弹簧垫片140可以包括互补的几何结构,当力被施加到水平臂110时,肩部150和弹簧垫片140一起产生期望的弹簧效应。弹簧垫片140包括被构造成接合肩部150并用作弹簧的内部几何结构。内部几何结构可以包括多个孔、延伸部、挠曲部、狭槽、沟槽、槽口和/或任何其他特征,这些特征被构造成以产生期望的弹簧效应的方式接合中心轴108和/或悬轴102。在许多实施例中,内部几何结构可以采取贯穿弹簧垫片140的整个厚度的切口的形式,并且从而形成一个或更多个孔。在许多实施例中,肩部150通常可以是大致圆柱形的。在一些实施例中,肩部150包括一个或更多个槽口,该一个或更多个槽口被构造成在弹簧插入件几何结构的一个或更多个特征之间相互作用并提供阻力。
[0062]
在一个实施例中,参照图11,弹簧垫片140包括周边141、多个突起144和多个缓冲部分146,在周边141中形成有中心孔142。突起144可以从弹簧垫片140的周边141向内朝向中心孔142延伸。在许多实施例中,突起144被构造成配合在形成在悬轴102的肩部150中的相对应的槽口152内。例如,在所示的实施例中,弹簧垫片140的突起144在形状上是大致三角形的,并且被构造成与形成在肩部150中的大致三角形形状的槽口152配合(如图10所
示)。在底架100的使用(乘用滑板或携带滑板)期间,水平臂110上的载荷导致突起144压靠肩部150的表面并提供对抗旋转的阻力。然而,由于弹簧垫片材料的柔性,突起144在足够的载荷下将挠曲以允许臂旋转。在许多实施例中,弹簧垫片140包括与突起144相对地形成的槽口148。弹簧垫片140的槽口148可以在弹簧垫片140的周边141和垫片凹槽132之间提供小空间,使得垫片在槽口148的特定位置处在凹槽内不齐平。由槽口148产生的空间为突起144在与肩部150接合时提供了较大的挠曲能力。
[0063]
弹簧垫片140还包括多个缓冲部分146,缓冲部分146用作引导件,以在底架100的使用期间保持弹簧垫片140围绕悬轴102的肩部150居中,从而提供水平臂110的稳定旋转。在许多实施例中,虽然缓冲部分146邻接肩部150的一部分,但是肩部150和缓冲部分146之间的接触面积可以是最小的,以便在滑板的常规使用期间不抑制水平臂110的旋转。相反,突起144提供了弹簧垫片140和肩部150之间的主要接触区域。在足够的载荷下,突起144挠曲以允许水平臂110旋转,并且缓冲部分146用于保持弹簧垫片140居中。
[0064]
弹簧垫片140还可以包括位于周边141附近的一对附接孔149。附接孔149可以被构造成接收机械紧固件(例如螺钉)。附接孔149为弹簧垫片140提供了通过这种机械紧固件固定在水平臂110内的位置。
[0065]
图12示出了根据本发明的弹簧垫片240的替代实施例。弹簧垫片240类似于弹簧垫片140,并且包括基本相同的几何结构。弹簧垫片240还执行与弹簧垫片140相同的功能,其中,在与悬轴102的肩部150接合时,弹簧垫片的几何结构的一些部分被构造成提供抵抗旋转的阻力,但在足够的载荷下挠曲并允许旋转。弹簧垫片240不是朝向孔242向内延伸的突起,而是包括横向延伸跨越垫片的一对长形挠曲部分244。与垫片的其他部分相比,挠曲部分244可以是基本上薄的,从而允许挠曲部分244在与悬轴102的肩部150接合时挠曲。类似于弹簧垫片140的槽口148,弹簧垫片240的挠曲部分244可以在弹簧垫片240的周边241和垫片凹槽132之间形成空间。当肩部150压靠在挠曲部分244上时,该空间允许挠曲部分244向外挠曲。在足够的载荷下,挠曲部分244挠曲到足以允许水平臂110旋转。在许多实施例中,弹簧垫片240还包括与弹簧垫片140的缓冲部分和附接孔相似的多个缓冲部分246和附接孔249。
[0066]
图13示出了根据本发明的弹簧垫片340的另一替代实施例。弹簧垫片340类似于弹簧垫片140和240,并且包括基本相似的特征。弹簧垫片340还执行与弹簧垫片140和240相同的功能,其中在与悬轴102的肩部150接合时,弹簧垫片的几何结构的一些部分被构造成提供抗旋转的阻力,但在足够的载荷下挠曲并允许旋转。弹簧垫片340包括多个长形突起344,这些突起远离周边341延伸并被构造成接合肩部150的一部分。弹簧垫片340还包括将长形突起344与周边341分开的狭槽345。当肩部150压靠在长形突起344上时,狭槽345允许长形突起344朝向周边341向外弯曲。在足够的载荷下,长形突起344挠曲到足以允许水平臂110旋转。弹簧垫片340还包括类似于弹簧垫片140的缓冲部分146的缓冲部分346。然而,代替在缓冲器部分346和肩部150之间产生小接触面积的缓冲器部分146,弹簧垫片340的缓冲器部分346可以包括与肩部150的形状相对应的弧形表面,并且在缓冲器部分346和肩部150之间提供更大的接触面积。这种构造在使弹簧垫片340相对于中心轴108和悬轴102居中时提供了额外的稳定性,同时仍然允许水平臂110旋转。在一些实施例中,弹簧垫片340还包括形成在每个缓冲部分346和长形突起344之间的多个间隙347。多个间隙347可以将缓冲器部分
346和长形突起344彼此分开,并允许在弹簧垫片340的内部几何结构内有更大的整体挠曲。
[0067]
弹簧垫片140约束水平臂110的旋转。当底架100在地面上时,水平臂110可以被认为处于“静止”位置。当静止时,水平臂110可以大致平行于滑板的板面,并且轮可以近似均匀地远离板面的下侧间隔开。当滑板被携带时(即,当轮不接触地面时),轮的重量向水平臂110施加力,导致水平臂110想要旋转离开静止位置。弹簧垫片140的几何结构可以与肩部150的几何结构接合,并限制水平臂110旋转,并且水平臂110将通常保持在静止位置。通过将水平臂110保持在静止位置并限制其旋转,弹簧机构130防止轮撞到板面的下侧,如果在携带板时水平臂110能够自由旋转,就会出现轮撞到板面的下侧的情况。
[0068]
然而,在滑板的使用期间,希望水平臂110旋转并产生提升作用,以便允许多轮底架100平稳地穿过不连续和不平坦的表面。弹簧机构130可以允许水平臂110在滑板的使用期间旋转。如果在使用期间向水平臂110施加足够的力矩,如在穿越裂缝或不平坦表面时的情况,肩部150压靠柔性弹簧垫片140的力导致弹簧部分挠曲,允许水平臂110旋转并产生期望的提升作用。
[0069]
在许多实施例中,弹簧机构130可以包括旋转阈值。旋转阈值可以定义为施加到水平臂110的最小力,其中弹簧机构130允许水平臂110旋转。例如,如果施加到水平臂110的力小于旋转阈值,则弹簧机构130限制水平臂110的旋转并将水平臂110保持在静止位置。相反,如果施加到调平臂110的力大于旋转阈值,则弹簧机构130允许调平臂110旋转。旋转阈值可以取决于弹簧垫片140的设计,特别是内部几何结构和所使用的材料。优选地,弹簧垫片140被设计成使得与携带滑板相关联的较小力低于旋转阈值,而与乘用滑板越过障碍物和不连续表面相关联的较大力优选地高于旋转阈值。在一些实施例中,旋转阈值在大约0.1英尺磅和1.5英尺磅之间。在一些实施例中,旋转阈值可以在大约0.1英尺磅和0.25英尺磅之间、在大约0.25英尺磅和0.5英尺磅之间、在大约0.5英尺磅和0.75英尺磅之间、在大约0.75英尺磅和1.0英尺磅之间、或者在大约1.0英尺磅和1.5英尺磅之间。在一些实施例中,旋转阈值可以在大约0.1英尺磅和0.4英尺磅之间、在大约0.4英尺磅和0.7英尺磅之间、在大约0.7英尺磅和1.1英尺磅之间、或者在大约1.1英尺磅和1.5英尺磅之间。旋转阈值允许弹簧机构130在足够小的载荷下限制水平臂110的旋转,但又允许水平臂110在足够大的载荷下旋转。
[0070]
在许多实施例中,弹簧机构130包括位于水平臂110中形成的垫片凹槽132内的弹簧垫片140。然而,在替代实施例中,弹簧机构130可以整体地形成在水平臂110内,而不是在水平臂110内包括单独的弹簧垫片140。换句话说,水平臂110可以形成有以中间孔115为中心的整体弹簧几何结构,其提供与上述实施例的弹簧垫片相同的弹簧效应。在许多这样的实施例中,包括整体弹簧几何结构的水平臂110可以由非金属材料形成,例如注塑塑料材料或复合材料。下面将进一步详细讨论具有整体弹簧机构的提升臂的实施例。
[0071]
iv.其他特征
[0072]
如上所述,多轮底架100包括悬轴102和基板170,悬轴102和基板170用于联接多个轮组,并将底架100构造成可附接到滑板板面的下侧。如图2所示,悬轴102被构造成将轮组联接至底架100,并且基板170被构造成接收悬轴102并将底架100附接到滑板板面的下侧。
[0073]
图14和图15示出了多轮底架100的悬轴102的实施例。悬轴102包括第一端104和与第一端104相对的第二端106。悬轴102限定在第一端104和第二端106之间延伸的纵向轴线
1000,其中第一端和第二端各自位于纵向轴线1000附近。悬轴102还限定垂直于纵向轴线1000延伸的横向轴线1100。因此,横向轴线1100相对于滑板的前部和后部对应于悬轴102的前后方向。在许多实施例中,第一端和第二端位于悬轴102的前部附近,而悬轴102的其他部件,例如枢轴尖端(pivot tip)162或枢轴鞍座(pivot saddle)172,可以位于第一端和第二端的后方。在许多实施例中,悬轴102的最大宽度位于第一端和第二端之间,使得悬轴102的前部包括悬轴的最宽部分。第一端和第二端通常形成悬轴102的最宽部分,使得附接到第一端和第二端的轮组与悬轴102的其余部分间隔开,并且自由旋转而不受悬轴102的干扰。
[0074]
第一端104和第二端106中的每一个可以包括空隙156,空隙156被构造成将轮组联接到悬轴102。空隙156被构造成接收轮组的中心轴108并将中心轴108固定地附接到悬轴102。在许多实施例中,空隙156带有螺纹以接收中心轴108的相应螺纹部分。在一些实施例中,空隙156可以包括适合于将中心轴108的一部分固定在其中的任何形式的附接机构,例如卡扣配合、粘合剂、环氧树脂、磁体、互锁附接机构、或它们的一些组合。
[0075]
如上面简要讨论的,悬轴102还包括多个肩部150,肩部150被构造成在水平臂110旋转时接合水平臂110的弹簧垫片140。如图14和图15所示,悬轴102包括位于第一端和第二端106中的每一个处的肩部150。在许多实施例中,肩部150从悬轴102的端部突出,使得肩部150可以被接收在弹簧垫片140的内部几何结构内。肩部150包括被构造成对应于弹簧垫片140的内部几何结构的几何结构,使得肩部150能够在水平臂110旋转时接合弹簧垫片140并产生上述弹簧效应。如图14和图15的实施例所示,几何结构包括大致圆柱形的形状,但在其周边有多个槽口152。每个槽口152可以被构造成接收弹簧垫片140的突起144,例如弹簧垫片140的突起144。当水平臂110围绕中心轴108旋转时,槽口152的表面可压靠弹簧垫片140的突起144并将水平臂110的旋转限制为至多一定量的力。
[0076]
在许多实施例中,悬轴102可以被构造成围绕基板170的一部分向左或向右枢转,以在使用期间控制滑板的方向。当乘用者将他或她的重量移向滑板的右侧或左侧时,悬轴102可围绕基板170枢转,使滑板向左或向右转向。悬轴102包括枢轴主体160,枢轴主体160被构造成接合基板170的枢轴支环164并允许悬轴102枢转。枢轴主体160可以位于悬轴102的前部的后方,并且可以包括基本上小于悬轴102的最大宽度的宽度。在许多实施例中,枢轴主体160是大致三角形形状的,具有圆形边缘,该圆形边缘允许悬轴102围绕枢轴支环164的表面枢转。
[0077]
悬轴102还包括枢轴尖端162,枢轴尖端162被构造成使悬轴102围绕基板170居中。在许多实施例中,枢轴尖端162从悬轴102的最后部分突出。枢轴尖端162可以被基板170的一部分(例如枢轴支环164)接收,这将在下面进一步详细描述。在许多实施例中,枢轴尖端162是大致圆柱形的,但有盖或有尖端的端部,以用于允许悬轴102在枢轴支环164内平滑地旋转和/或枢转。枢轴尖端162可以与悬轴102一体形成,从而形成连续的悬轴结构。
[0078]
如图14所示,悬轴102包括销钉孔178,销钉孔178接收销钉175或其他附接机构,以允许悬轴102联接到底架100的一个或更多个其他部件,例如基板170。销钉孔178可以是延伸穿过吊架主体的一部分的通孔。在许多实施例中,销钉孔178基本上位于悬轴102的中心,靠近枢轴主体160。在许多实施例中,销钉孔178位于枢轴主体160和悬轴102的前部之间。悬轴102和基板170之间经由销钉孔178的连接将在下面进一步详述。
[0079]
悬轴102可以由用于构造常规滑板底架的任何材料构造。悬轴102可由以下任何一
种或组合构成:8620合金钢、s25c钢、碳钢、马氏体时效钢、17-4不锈钢、1380不锈钢、303不锈钢、不锈钢合金、拉丝钢、钨、镁、镁合金、钛、钛合金、ti-6-4、铝、铝合金、铝2024、铝3003、铝5052、铝6061、铝7075、adc-12、铝a356、镁az61a、镁az80a、镁az31b、碳纤维增强塑料复合材料、玻璃填充塑料复合材料、尼龙、聚醚醚酮、聚醚酰亚胺、聚苯硫醚、或任何适于制造悬轴或滑板底架的材料。在许多实施例中,悬轴102可以由铝6061、铝a356、或镁az61a构造。悬轴102的材料可以基于悬轴102的预期用途和/或期望重量而变化。
[0080]
在一些实施例中,悬轴102可以包括一个或更多个重量减轻特征158。重量减轻特征158可以以槽口、凹口、间隙、空隙、或孔等的形式提供。重量减轻特征158是悬轴102的没有材料的区域或部分。重量减轻特征158可以设置在悬轴102的任何部分内,例如在以下中:第一端104、第二端106、枢轴主体160、枢轴尖端162,基本上靠近悬轴102的前部,或者基本上靠近悬轴102的后部。在许多实施例中,重量减轻特征158设置在枢轴主体160内,因为枢轴主体160通常是悬轴质量的最实质性部分。
[0081]
重量减轻特征158可占据悬轴102体积的约1%至约20%之间。在许多实施例中,重量减轻特征158可以占据悬轴102的体积的大约1%到大约5%之间、大约5%到大约10%之间、大约10%到大约15%之间、或者大约15%到大约20%之间。在替代实施例中,重量减轻特征158可占据悬轴体积的大约1%、大约2%、大约3%、大约4%、大约5%、大约6%、大约7%、大约8%、大约9%、大约10%、大约11%、大约12%、大约13%、大约14%、大约15%、大约16%、大约17%、大约18%、大约19%、或大约20%之间。一个或更多个重量减轻特征158在保持结构完整性的同时允许悬轴102的质量保持在最小。
[0082]
底架100还包括基板170,基板170被构造成接收悬轴102并将底架100联接到滑板板面的下侧。基板170可以通过任何紧固装置,例如螺钉、螺栓、粘合剂、卡扣配合、或其一些组合,机械地附接到滑板板面的下侧。在许多实施例中,如图16所示,基板170包括多个孔174,这些孔延伸穿过基板170的主体,并被构造成接收诸如螺栓或螺钉的机械紧固件。在许多实施例中,多个孔174中的每一个都靠近基板170的外周或外周边缘。此外,在一些实施例中,孔174可以是有螺纹的,以接收相对应的螺纹紧固件。在一些实施例中,基板170可以具有两个孔、三个孔、四个孔、五个孔、六个孔、或七个孔。在许多实施例中,基板可以包括至少四个孔174,以提供足够的结构刚性来将基板170固定到滑板的板面。
[0083]
基板170可以由用于构造常规滑板底架的任何材料构造。基板170可由以下任何一种或组合构成:8620合金钢、s25c钢、碳钢、马氏体时效钢、17-4不锈钢、1380不锈钢、303不锈钢、不锈钢合金、拉丝钢、钨、镁、镁合金、钛、钛合金、ti-6-4、铝、铝合金、铝2024、铝3003、铝5052、铝6061、铝7075、adc-12、铝a356、镁az61a、镁az80a、镁az31b、碳纤维增强塑料复合材料、玻璃填充塑料复合材料、尼龙、聚醚醚酮、聚醚酰亚胺、聚苯硫醚、或任何适于制造基板或滑板底架的材料。在许多实施例中,基板170可以由铝6061、铝a356、或镁az61a构造。基板170的材料可以基于基板170的预期用途和/或期望重量而变化。
[0084]
基板170还包括鞍座172和在与滑板板面相反的方向上延伸的枢轴支环164。鞍座172形成用于悬轴102的枢轴主体160的基座,以安置在其上以及在其上进行枢转。在许多实施例中,鞍座172的表面基本上是平的。这允许悬轴102的圆形表面和/或圆形边缘能够围绕鞍座172的表面枢转。鞍座172可以位于基板170的前部附近,并且可以使悬轴102成当完全被组装时悬轴102的前部靠近基板170的前部。在许多实施例中,鞍座172以一定角度远离滑
板板面延伸,使得悬轴102相对于滑板板面以一定角度定向。通过以这种方式使悬轴102成角度,悬轴102在鞍座172上的枢转动作导致轮向左或向右转向。这样,乘用者可以在使用过程中通过向左或向右转移他或她的重量来控制滑板的方向。
[0085]
鞍座172还包括销钉接收端口176。销钉接收端口176可以采取延伸穿过鞍座172的孔的形式。销钉接收端口176被构造成接收将基板170联接到悬轴102的销钉175。在许多实施例中,销钉接收端口176可以是有螺纹的,也可以是没有螺纹的。销钉接收端口176的几何特征(即螺纹类型、螺纹数、螺距等)可以基于销钉175的类型和几何结构而变化。
[0086]
枢轴支环164形成在鞍座172的后方,并被构造成接收悬轴102的枢轴尖端162。枢轴支环164形成杯状结构,包括形成空腔的一个或更多个内壁。枢轴支环164成形为接收枢轴尖端162并将枢轴尖端162容纳在空腔内。当被组装时,枢轴支环164通过将枢轴尖端162保持在枢轴支环164内来帮助将悬轴102在基板170上居中。在许多实施例中,枢轴支环164的内壁可以形成与枢轴尖端162的大致圆柱形的形状相对应的大致圆柱形的形状。以这种方式,枢轴尖端162可以保持在枢轴支环164内,同时当悬轴102枢转时,仍然允许枢轴尖端162在枢轴支环164内旋转。
[0087]
图17示出了其中悬轴102和基板170联接的构造。悬轴102安置于基板170上,并通过销钉175联接到基板170上。悬轴102安置于成角度的鞍座172上,使悬轴102相对于滑板板面成一定角度定向。悬轴102的枢轴主体160以允许悬轴102围绕鞍座172枢转的方式搁置在鞍座172的表面上。此外,悬轴102的枢轴尖端162插入基板170的枢轴支环164中,以使悬轴102相对于基板170居中。
[0088]
鞍座172的销钉接收端口176与悬轴102的销钉孔178对齐,并且每个都被构造成接收销钉175。在许多实施例中,销钉175是有螺纹的长形螺钉。销钉175延伸穿过销钉接收端口176和销钉孔178中的每一个,以联接悬轴102和基板。在许多实施例中,螺纹螺栓180可以附接到销钉175的螺纹端,以将销钉175锁定到位并固定在基板170和悬轴102之间的连接。
[0089]
如上所述,多轮底架100包括一个或更多个水平臂110,水平臂110用于连接轮组中的多个轮以及旋转以提供越过障碍物和不连续表面的提升作用。在许多实施例中,一个或更多个水平臂110由金属材料、非金属材料、或它们的某种组合构造。在许多实施例中,一个或更多个水平臂110可以由下列任一项或组合:8620合金钢、s25c钢、碳钢、马氏体时效钢、17-4不锈钢、1380不锈钢、303不锈钢、不锈钢合金、拉丝钢、钨、镁、镁合金、钛、钛合金、ti-6-4、铝、铝合金、铝2024、铝3003、铝5052、铝6061、铝7075、adc-12、铝a356、镁az61a、镁az80a、镁az31b、碳纤维增强塑料复合材料、玻璃填充塑料复合材料、尼龙、聚醚醚酮(peek)、聚醚酰亚胺、聚苯硫醚、或任何适于制造滑板底架的部件的材料。在许多实施例中,一个或更多个水平臂110可以由铝6061、铝a356、或镁az61a构造。在其他实施例中,一个或更多个水平臂110可以由尼龙或碳纤维增强尼龙构造。在一些实施例中,一个或更多个水平臂110可以包括组合由碳纤维增强塑料形成的一部分和没有碳纤维增强的塑料的多部分结构。
[0090]
如图18的替代实施例所示,一个或更多个水平臂210可包括多部件结构,该多部件结构包括骨架部分218和壳体部分219。骨架部分218可以是水平臂210的内部部分,并且可以包括水平臂的主要结构元件,包括形成水平臂210的前孔、中间孔、和后孔。以这种方式,骨架部分218是水平臂的唯一直接接收和接触轮组的多个轴的部分。骨架部分218可以由高
强度材料形成,以向水平臂210提供支撑和耐久性。在许多实施例中,骨架部分218可以由硬塑料构造,例如由碳纤维增强塑料复合材料或玻璃填充塑料复合材料、金属材料、或具有足够强度以向水平臂210提供支撑和耐久性的任何其他材料构造。
[0091]
壳体部分219包围并包封骨架部分218的至少一部分。在许多实施例中,壳体部分219由“更软的材料”构造,该“更软的材料”包括比骨架部分218更高的伸长率。在许多实施例中,壳体部分219由注塑塑料、未填充塑料(即不含碳纤维或玻璃增强材料的塑料)、尼龙、聚丙烯、聚乙烯、或具有所需伸长率的任何其他塑料或其他材料构造。壳体部分219可以提供防止水平臂210失效的保护。例如,如果由于其高强度而刚性的骨架部分218被损坏并破裂或完全失效,壳体部分219的高弹性将允许周围的壳体部分219伸长而不是断裂。这种构造防止水平臂210的灾难性故障。
[0092]
壳体部分219还可以被构造成包括一体地形成在其中的弹簧机构230。由于注射模制壳体部分219的能力,壳体部分219可以被设计成包括基本上类似于弹簧垫片140、240、和340的几何结构的弹簧几何结构。在水平臂210内包括整体地形成的弹簧机构230本身消除了对单独形成的弹簧垫片的需要。
[0093]
如上所述,多轮底架100包括多个轮,包括至少一个中心轮120和一个或更多个辅助轮。每个轮可以由直径(轮直径)、宽度(轮宽度)、硬度(轮硬度)、和材料(轮材料)来表征。在许多实施例中,中心轮120的特性(直径、宽度、硬度、和/或材料)可以不同于一个或更多个辅助轮的特性。在其他实施例中,中心轮120的特性可以基本上类似于一个或更多个辅助轮的特性。
[0094]
在许多实施例中,如图6所示,一个或更多个轮的直径范围大约在1.5英寸和4.0英寸之间。在一些实施例中,一个或更多个轮的直径的范围可以在1.5英寸和2.0英寸之间、在2.0英寸和2.5英寸之间、在2.5英寸和3.0英寸之间、在3.0英寸和3.5英寸之间、或在3.5英寸和4.0英寸之间。在一些实施例中,一个或更多个轮的直径的范围可以在1.5英寸和1.75英寸之间、在1.75英寸和2.0英寸之间、在2.0英寸和2.25英寸之间、在2.25英寸和2.5英寸之间、在2.5英寸和2.75英寸之间、在2.75英寸和3.0英寸之间、在3.0英寸和3.25英寸之间、在3.25英寸和3.5英寸之间、在3.5英寸和3.75英寸之间、或在4.0英寸之间。
[0095]
一个或更多个轮可以具有相对于另一个轮、两个或更多个轮、三个或更多个轮、四个或更多个轮、或五个或更多个轮基本相似的直径。在许多实施例中,至少一个中心轮120可以具有相对于一个或更多个辅助轮基本相似的直径d1。在一些实施例中,一个或更多个辅助轮可以具有相对于一个或更多个其他辅助轮基本相似的直径d2。例如,特定轮组的前轮122可以包括与相同轮组的后轮124基本相似的直径。在其他实施例中,一个或更多个辅助轮可以具有相对于一个或更多个其他辅助轮基本不同的直径d2。例如,特定轮组的前轮122可以包括比相同轮组的后轮124大得多或小得多的直径。
[0096]
在替代实施例中,一个或更多个轮可以具有相对于另一个轮、两个或更多个轮、三个或更多个轮、四个或更多个轮、或五个或更多个轮基本不同的直径。在许多实施例中,至少一个中心轮120可以具有相对于一个或更多个辅助轮基本不同的直径。在一些实施例中,至少一个中心轮120的直径d1可以小于至少一个辅助轮的直径d2。在一些实施例中,至少一个中心轮120的直径d1可以大于至少一个辅助轮的直径d2。在一些实施例中,一个或更多个辅助轮可以具有相对于一个或更多个其他辅助轮基本不同的直径。例如,特定轮组的前轮
122可以包括比相同轮组的后轮124大得多或小得多的直径。
[0097]
一个或更多个轮的直径对于允许底架100平稳地穿越障碍物和不连续的表面是重要的。轮被设定尺寸成具有足够大的直径,使得当给定的轮遇到障碍物时,沿着轮接触障碍物的点在轮上出现得足够低,以减小轮和障碍物之间的冲击力。如上所述,一个或更多个轮的直径也影响攻角α。减小或增大前轮和/或中心轮120的直径改变参考点r1和/或参考点r2相对于彼此的定位。改变参考点的位置可以改变参考线a的取向,以及影响在参考线a和参考线b之间形成的攻角α。
[0098]
例如,在一些实施例中,每个轮可设置有基本小的直径以提供基本陡峭的攻角α(即基本大于45度的攻角)。在其它实施例中,每个轮可设置有相当大的直径,以提供基本较平缓的攻角α(即基本大于45度的攻角)。在一些实施例中,每个轮可以设置有不同的直径,以便优化攻角α。在一些实施例中,前轮122可以包括最大直径,中心轮120可以包括小于前轮122直径的直径d1,并且后轮124可以包括小于前轮122和中心轮120两者的直径。具有大的前轮122直径的这种实施例可以在穿越障碍物时提供额外的优点。前轮122通常是遇到这种障碍物的第一个轮,并且提供大的前轮122直径使在障碍物和前轮122之间的撞击最小化。如上所述,每个相应轮的直径可以与每个轮的宽度和间距相平衡,以优化攻角α。
[0099]
在许多实施例中,一个或更多个轮的轮宽度的范围可以在大约0.1英寸和2.5英寸之间。在一些实施例中,一个或更多个轮的宽度可以在大约0.1至0.5英寸之间、在0.5至1.0英寸之间、在1.0至1.5英寸之间、在1.5至2.0英寸之间、或在2.0至2.5英寸之间。在一些实施例中,用于一个或更多个轮的轮可以在大约0.1英寸和0.25英寸之间、在0.25英寸和0.5英寸之间在0.5和0.75英寸之间、在0.75和1.0英寸之间、在大约1.0和1.25英寸之间、在1.25和1.5英寸之间、在1.5和1.75英寸之间、在1.75和2.0英寸之间、在2.0和2.25英寸之间、或在2.25和2.5英寸之间。
[0100]
在许多实施例中,每个辅助轮的宽度w2基本上与其他辅助轮的宽度相同。例如,给定轮组中的后轮124和前轮122通常包括相同的宽度w2。在许多实施例中,辅助轮的宽度w2约为0.5英寸。在许多实施例中,一个或更多个辅助轮的宽度w2的范围可以在大约0.1英寸和1.5英寸之间。在一些实施例中,一个或更多个辅助轮的宽度w2的范围可以在大约0.1英寸和0.3英寸之间、在0.3英寸和0.5英寸之间、在0.5英寸和0.7英寸之间、在0.7英寸和0.9英寸之间、在0.9英寸和1.1英寸之间、在1.1英寸和1.3英寸之间、以及在1.3英寸和1.5英寸之间。
[0101]
在许多实施例中,中心轮120的宽度w1大于辅助轮的宽度w2。在许多实施例中,中心轮120的宽度w1约为1.7英寸。在许多实施例中,中心轮120的宽度w1的范围可以在大约1.0和2.5英寸之间。在一些实施例中,中心轮120的宽度w1可以在1.0和1.25英寸之间、在1.25和1.5英寸之间、在1.5和1.75英寸之间、在1.75和2.0英寸之间、在2.0和2.25英寸之间、或在2.25和2.5英寸之间。当滑板沿着光滑的滚动表面滚动时,总体上承担大部分载荷的中心轮120设置有更大的宽度w1,以增加底架100的稳定性以及增加中心轮120的耐用性。
[0102]
轮的相应宽度,特别是中心轮和前轮122的宽度,影响攻角α。减小或增大前轮和/或中心轮120的宽度改变参考点r1和/或参考点r2相对于彼此的位置。改变参考点的位置可以改变参考线a的取向,并影响在参考线a和参考线b之间形成的攻角α。
[0103]
在许多实施例中,每个轮的轮硬度可以由轮的预期用途和与地面的期望抓地能力
来确定。例如,如果用户需要提供足够抓地力以在不平坦或连续的表面、人行道收缩缝、裂缝、鹅卵石、岩石等上操纵的轮,那么在肖氏a硬度计刻度上测量的一个或更多个轮的硬度的范围可以在大约78a-98a之间。在其他实施例中,一个或更多个轮的硬度可以在大约78a-80a、80a-82a、82a-84a、84a-86a、86a-88a、88a-90a、90a-92a、92a-94a、94a-96a、或96a-98a之间。在一些实施例中,轮硬度值可以是78a、79a、80a、81a、82a、83a、84a、85a、86a、87a、88a、89a、90a、91a、92a、93a、94a、95a、96a、97a、或98a。为了获得期望的轮硬度,多个轮可以由不同硬度值的各种塑料或塑料聚氨酯材料组成。
[0104]
在许多实施例中,一个或更多个轮可由选自以下组的材料构成:热塑性树脂、热塑性聚氨酯、热固性树脂、芳香二异氰酸酯、甲苯二异氰酸酯(tdi)、亚甲基二苯基二异氰酸酯(mdi)、尼龙、聚丙烯、聚乙烯、或任何适于制造滑板轮的材料。在一些实施例中,中心轮120的材料与多个辅助轮122、124的材料相同。在其他实施例中,中心轮120可以由选自上述组的第一材料构造,而多个辅助轮122、124由选自上述组的第二材料构造。在许多实施例中,中心轮120由诸如mdi的热固性塑料构造,并且多个辅助轮122、124由tpu构造。
[0105]
v.电动滑板实施例
[0106]
在一些实施例中(未示出),本文描述的多轮底架100可以被构造成应用于电动滑板。在许多实施例中,多轮底架100可以被构造成接收连接到电动马达的一条或更多条传送带。在这样的实施例中,传送带可以将电动马达连接到中心轴108,其中马达被构造成经由一条或更多条传送带驱动中心轴108。电动马达可以通过驱动传送带,传送带又使轴旋转,来向轴传递动力。在这样的实施例中,每个轮组的中心轮120可以固定地附接到中心轴108上,而不是可旋转地附接到中心轴108上。这样,中心轮120可以在由电动马达提供动力时旋转并向前推动滑板。
[0107]
在其他实施例中(未示出),多轮底架100可以包括被构造成接收轮毂马达的一个或更多个轮。每个轮毂马达可以被限制在每个中心轮120内,并且可以联接到中心轴108。在这样的实施例中,轮毂马达可以围绕中心轴108旋转,向中心轮120提供动力并导致中心轮120旋转。由轮毂马达引起的中心轮120的旋转推动滑板前进。
[0108]
在一些实施例中,多轮底架100可以被构造成在一个轮、一个或更多个轴、悬轴102、或枢轴鞍座172中接收一个或更多个传感器。传感器可以与马达通信,并在用户踏上板或转移重量时传输控制马达的速度的信号。这样,用户可以通过在滑板的板面上向前或向后倾斜来控制滑板的速度。
[0109]
vi.示例
[0110]
1.示例1
[0111]
根据本发明的示例性滑板底架100包括产生43.72度的攻角α的轮组构造。示例性底架100包括在前轮122和中心轮120之间1.62英寸的前后距离142。示例性底架100包括在中心轮120所位于的第一平面2000和前轮122所位于的第二平面3000之间1.97英寸的横向距离p1。前轮122包括0.55英寸的宽度w2和2.75英寸的直径d2。中心轮120包括1.68英寸的宽度w1和2.76英寸的直径d1。示例性底架100的前轮122和中心轮120的相应尺寸和位置使第一参考点r1和第二参考点r2定位成使得连接第一参考点r1和第二参考点r2的线a相对于平行于纵向轴线延伸的参考线b形成43.72度的攻角α。
[0112]
2.示例2
[0113]
将根据本发明的包括多轮底架(每个底架总共6个轮)的示例1的示例性滑板与包括没有任何水平臂的常规底架(每个底架总共2个轮)的对照滑板在1.5英寸隆起上的减速度进行了比较,多轮底架具有含有弹簧机构130的水平臂和43.72度的攻角。在每次试验中,由加速度计测量滑板在与隆起撞击过程中经历的减速度。下表1显示了比较结果。较高的幅度对应于较大的减速度和较大的速度损失。
[0114]
表1
[0115][0116]
平均而言,示例性滑板的减速度比所述对照滑板小2.28g。示例性滑板上减速度的这种降低转化为在隆起上的速度损失比对照滑板少58%。
[0117]
将根据本发明的包括多轮底架(每个底架总共6个轮)的示例1的示例性滑板与包括没有任何水平臂的常规底架(每个底架总共2个轮)的对照滑板在3英寸伸缩缝(或裂缝)上的减速度进行了比较,该多轮底架具有含有弹簧机构130的水平臂和43.72度的攻角。在每次试验中,通过加速度计测量滑板在与伸缩缝撞击期间经历的减速度。下表2显示了比较结果。较高的幅度对应于较大的减速度和较大的速度损失。
[0118]
表2
[0119][0120]
平均而言,示例性滑板经历了比对照滑板小2.12g的减速度。示例性滑板的这种降低的减速度转化为在裂缝上的速度损失比对照滑板少66%。
[0121]
当与具有常规底架的滑板相比时,如上所示的示例性滑板在隆起和伸缩缝上所经历的速度保持为多轮底架滑板的使用者提供了明显更平稳的乘用。此外,与常规滑板相比,在障碍物上的速度保持允许用户施加更少的能量来行进相同的距离。
[0122]
3.示例3
[0123]
将根据本发明的示例1的包括多轮底架(每个底架总共6个轮)的示例性滑板与包括没有任何水平臂的常规底架(每个底架总共2个轮)的对照滑板在1英寸隆起上在多个不同接近角下的减速度进行了比较,该多轮底架具有含有弹簧机构130的水平臂110和43.72度的攻角。在每次试验中,乘用滑板的用户以每小时5.5英里的速度接近1英寸的隆起。在每次试验中,通过安装在滑板上的加速度计测量与隆起的撞击过程中经历的减速度。下表3显示了比较结果。
[0124]
表3
[0125][0126]
对于以90度(基本垂直)的接近角发生的撞击,示例性滑板平均经历了比对照滑板小1.40g的减速度。示例性滑板上的这种降低的减速度转化为在隆起上的速度损失比对照滑板少42%。对于以75度(与垂直方向成15度)的接近角发生的撞击,示例性滑板平均经历了比对照滑板小0.69g的减速度。示例性滑板上减速度的这种降低转化为在隆起上的动量的损失比对照滑板少17%。对于以60度(与垂直方向成30度)的接近角发生的撞击,示例性滑板平均经历了比对照滑板小0.58g的减速度。示例性滑板上减速度的这种降低转化为在隆起上的动量的损失比对照滑板少14%。对于以45度(与垂直方向成45度)的接近角发生的撞击,示例性滑板平均经历了比对照滑板小0.27g的减速度。示例性滑板上减速度的这种降低转化为在隆起上的动量的损失比对照滑板少8%。
[0127]
当与对照滑板相比时,示例性滑板的最显著的速度保持效果发生在最接近于垂直接近角的撞击上。这是由于悬架系统在隆起上直接提供提升作用。示例性滑板在笔直向前接近隆起时经历了最小量的减速度,而对照滑板在笔直向前接近隆起时经历了显著量的减速度。示例性滑板的使用者可以笔直向前面对障碍物并成功地穿越它们,而不会显著损失速度。这使得示例性滑板的使用者能够在滑板的正常使用期间采取更直接的行进路线,从而减少行进的时间和距离。
[0128]
示例性滑板还表现出对于非垂直角度的降低的减速度。即使在接近角平缓至45度的情况(这在滑板的使用过程中是不典型的)下,与对照滑板相比,示例性滑板表现出显著的速度保持。可以看出,示例性滑板的攻角α提供了稳定性,并允许即使在极端角度下也能产生提升作用。
[0129]
替换一个或更多个所要求保护的元件构成了重建而不是修复。另外,关于具体实施例已经描述了益处、其他优点和问题的解决方案。然而,可能导致任何益处、优点或解决方案发生或变得更加明显的益处、优点、问题的解决方案以及任何一个或更多个要素不应被解释为任何权利要求或所有权利要求的关键的、必需的或必要的特征或要素。
[0130]
此外,在以下情况下,本文公开的实施例和限制并不根据奉献原则奉献给公众:(1)如果在权利要求中没有要求保护;以及(2)如果实施例和/或限制在等同原则下是或可能是权利要求中明示要素及/或限制的等同物。
[0131]
本公开的不同特征和优点在所附权利要求中阐述。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。