1.本发明涉及一种微机械设备、尤其是微镜设备,以及一种用于制造微机械设备的方法。
背景技术:
2.由文件us 2018/0307038 a1已知一种作为微机械设备的微镜设备,其中,镜板和弹簧元件布置在不同的、彼此平行的平面中并且通过在中间平面中的另外的元件相互连接。由此应减少镜元件的动态变形。
3.在此出现的问题是,在从镜板到连接元件的直角过渡部上,在偏移镜子的情况下局部地出现应力峰值,该应力峰值可以导致该构件在该棱边中的断裂。
4.基于该现有技术,本发明的任务在于开发一种在动态负载方面更稳定的微机械设备。
技术实现要素:
5.为了解决该任务,提出一种根据权利要求1所述的微机械设备以及一种根据权利要求15所述的用于制造微机械设备的方法。
6.微机械设备尤其代表微镜设备。替代地,微机械设备尤其构造为微机械压力传感器或者微机械惯性传感器或者微机械泵。微机械设备具有至少第一微机械部件和第二微机械部件。第一部件和第二部件直接地或者间接地相互连接。优选地,所述第一和/或第二微机械部件由半导体材料、尤其是硅构成。第一微机械部件具有第一子主体和至少一个第二子主体。在此,第一微机械部件尤其一体地构造。第一子主体在第一平面中伸展,第二子主体在第二平面中伸展,该第二平面与第一平面不同。第一平面和第二平面彼此平行地伸展,其中,第一平面在第二平面上方伸展。尤其是,第一平面和第二平面是水平伸展的平面。尤其是,第一子主体和第二子主体沿着分离平面、尤其是水平的分离平面彼此分开。第二子主体布置在到第二微机械部件的过渡区域中。在此,过渡区域尤其代表第一微机械部件到第二微机械部件的间接的或者直接的连接区域。在此,第二子主体在纵向方向上的、尤其是在第二平面中的第二延展尺度大于第一子主体在纵向方向上的、尤其是在第一平面中的第一延展尺度。在此,在相应的子主体的纵向方向上的延展尺度尤其指的是在水平方向上从第一和第二子主体的外边缘到外边缘的间距。优选地,第一子区域和第二子区域至少部分地重叠,并且第一子主体与第二子主体之间的由此产生的、朝向外部突出的梯级导致出现的动态负载划分到两个棱边上。因此,微机械设备承受住更高的动态负载。优选地,第一子主体置中地布置在第二子主体上方。
7.优选地,第二微机械部件布置在微机械设备的第三平面中,该第三平面与第一平面和第二平面不同。在此,第三平面与第一平面和第二平面平行地伸展。因此,第二微机械部件具有用于第一微机械部件的载体功能。
8.优选地,第一微机械部件和第二微机械部件一件式地由硅、尤其是晶体硅构成。在
这种情况下,第一微机械部件的第二子主体至少部分地直接与第二微机械部件邻接。在第一微机械部件与第二微机械部件之间的过渡区域中,相应地,两个微机械部件在材料方面不彼此分开。这样的微机械设备具有如下在生产技术方面的优点:为了进行生产,只需要唯一的、尤其是板形的硅衬底。
9.替代地,第一微机械部件和第二微机械部件优选由硅构成。微机械设备在此附加地具有至少一个二氧化硅层。第一微机械部件和第二微机械部件借助二氧化硅层尤其材料锁合地连接。优选地,第一微机械部件的第二子主体至少部分地直接与二氧化硅层邻接。在第一微机械部件与第二微机械部件之间的过渡区域中,相应地,两个微机械部件在材料方面彼此分开。
10.优选地,微机械设备构造为微镜设备。在这种情况下,第一微机械部件构造为微镜,第二微机械部件构造为尤其弹性的弹簧元件。在设计微镜时的挑战在于,实现大的偏移角度。偏移角度越大,弹簧中的应力负载(stressbelastung)就越大。然而,这样的应力负载可以导致弹簧元件与微镜之间的过渡棱边中的断裂。通过第一子主体与第二子主体之间的附加的梯级,出现的动态负载现在划分到两个棱边上。结果是,微镜设备可以以更高的偏移角度来运行。
11.优选地,第二子主体在纵向方向上的形状和/或第二延展尺度和/或第二子主体的高度根据微机械设备的预确定的机械应力分布来选择。优选地,第二子主体的高度相对于第一子主体这样选择,使得该应力均匀地分布和/或在二氧化硅层的情况下从二氧化硅层移走尽可能多的应力。优选地,对此,第二子主体的高度明显小于第一子主体的高度。优选地,第二子主体的高度与第一子主体的高度的比例至少为1:10。优选地,第一子主体与第二子主体之间的朝向外部突出的梯级的长度、尤其是第二子主体的第二子面的纵向延展尺度大于第二子主体的高度。换句话说,所产生的梯级的长度优选大于高度。优选地,第二子主体具有至少10μm并且最大20μm的高度。优选地,第一子主体与第二子主体之间的朝向外部突出的梯级、尤其是第二子主体的第二子面的纵向延展尺度具有至少30μm并且最大50μm的长度。
12.优选地,第一微机械部件的第一子主体和第二子主体具有矩形横截面。因此,第一子主体与第二子主体之间的梯级也具有棱边、尤其是90
°
的棱边,并且第二子主体的外侧在第六平面中伸展,该第六平面基本上垂直于第一平面和/或第二平面伸展。替代于此地,第一微机械设备的第二子主体具有第一子面,该第一子面至少部分地在第四平面中伸展。该第四平面倾斜于第一平面和/或第二平面和/或第三平面伸展。因此,第一子主体与第二子主体之间的梯级可以具有倾斜伸展的、尤其是凹状地或者凸状地或者以均匀的坡度伸展的外侧。
13.优选地,第一微机械设备的第二子主体具有第二子面,该第二子面在第五平面中、尤其是在第一子主体与第二子主体的分离平面中伸展,其中,该第五平面与第一平面和/或第二平面和/或第三平面平行地伸展。因此,第一子主体与第二子主体之间的梯级具有平坦的子面。
14.本发明的另外的主题是一种用于制造先前描述的微机械设备、尤其是微镜设备的方法。
附图说明
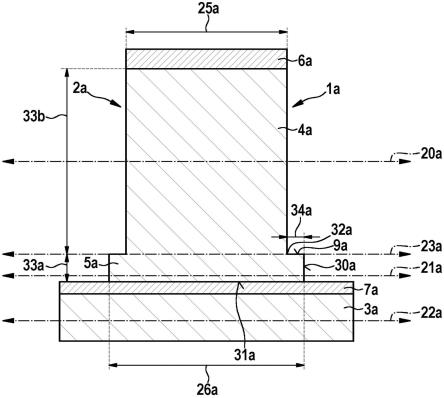
15.图1a示出微机械设备的第一实施方式。
16.图1b示出用于制造微机械设备的第一实施方式的方法。
17.图2a示出微机械设备的第二实施方式。
18.图2b示出用于制造微机械设备的第二实施方式的方法。
19.图3a示出微机械设备的第三实施方式。
20.图3b示出用于制造微机械设备的第三实施方式的方法。
具体实施方式
21.图1a示意性示出微机械设备1a的第一实施方式。在此,微机械设备1a构造为微镜设备。微机械设备1a具有第一微机械部件2a和第二微机械部件3a。在此,第一部件2a和第二部件3a间接地经由二氧化硅层7a相互连接。第一微机械部件2a具有第一子主体4a和至少一个第二子主体5a。第一子主体4a在第一平面20a中伸展,第二子主体5a在第二平面21a中伸展,该第二平面与第一平面20a不同。第一平面20a和第二平面相21a彼此平行地伸展,其中,第一平面20a在第二平面21a上方伸展。第二子主体5a布置在到第二微机械部件3a的过渡区域中。在该第一实施例中,第一微机械部件1a的第二子主体5a以其下侧31a在过渡区域中直接与二氧化硅层7a邻接。在此,第二子主体5a在纵向方向上的、尤其是在第二平面21a中的第二延展尺度26a大于第一子主体4a在纵向方向上的、尤其是在第一平面20a中的第一延展尺度25a。因此,在第一子主体4a与第二子主体5a之间产生梯级,该梯级在该第一实施方式中具有第二子主体5a的第二子面9a,该第二子面在第五平面23a中伸展。第五平面23a在此构造为第一子主体4a与第二子主体5a的分离平面,并且与第一平面20a和/或第二平面21a平行地伸展。在此,第二子主体5a的第二子面9a的纵向延展尺度34a大于第二子主体5a的高度33a。换句话说,所产生的梯级的长度优选大于高度。
22.第二微机械部件3a布置在微机械设备1a的第三平面22a中,该第三平面与第一平面20a和第二平面21a不同。第三平面22a与第一平面20a和第二平面21a平行地伸展。
23.示出的作为微机械设备1a的微镜设备具有微镜作为第一微机械部件2a和尤其弹性的弹簧元件作为第二微机械部件3a。
24.在该第一实施方式中,第一微机械部件1a的第一子主体4a和第二子主体5a具有矩形横截面,使得第一子主体4a与第二子主体5a之间的梯级具有尤其是90
°
的棱边32a,并且使得第二子主体5a的外侧30a在第六平面中伸展,该第六平面在此未示出,该第六平面基本上垂直于第一平面20a和/或第二平面21a伸展。
25.在此,第二子主体33b的高度相对于第一子主体4a的高度33a这样选择,使得从二氧化硅层7a移走尽可能多的应力。为此,第二子主体5a的高度33a选择得明显小于第一子主体4a的高度33b。第二子主体4a的高度33a与第一子主体4a的高度33b的比例在此基本上为1:10。
26.在该实施例中,微机械设备附加地具有第二二氧化硅层6a,该第二二氧化硅层布置在第一微机械部件2a的第一子主体4a上。
27.图1b示出用于制造微机械设备1a的方法。在此,在第一方法步骤中,硅衬底10a、尤其是板形硅衬底布置在第二微机械部件3a和二氧化硅层7a上方。尤其是,由硅衬底10a、二
氧化硅层7a和微机械部件3a构成的结构是二氧化硅晶片。此外,第一蚀刻掩膜6a、尤其是另外的二氧化硅层布置在硅衬底的上侧29a上。在随后的方法步骤15a中,将第二蚀刻掩膜11a施加到第一蚀刻掩膜6a上。第二蚀刻掩膜尤其是感光漆层。随后,在方法步骤15b中,在沟槽工艺中这样移除硅衬底10a的材料,使得在硅衬底10a的上侧中产生具有定义的形状的凹槽12a。在随后的方法步骤15c中,在蚀刻步骤中这样移除第一蚀刻掩膜6a的一部分,使得硅衬底10a的子面13a朝向外部裸露。在随后的方法步骤15d中,在另外的第二沟槽工艺中这样进一步向下蚀刻掉硅衬底10a的材料,使得产生第一微机械部件2a,该第一微机械部件具有根据图1a的第一子主体4a和第二子主体5a。在最后的方法步骤15e中,移除第二蚀刻掩膜11a。
28.图2a示出微机械设备1b的第二实施方式。与第一实施方式不同,微机械设备1b在此具有第二子主体5b,该第二子主体的外侧30b弯曲地、尤其是凹状地构造。因此,作为第二子主体的第一子面的该外侧30b至少部分地在第四平面中伸展,该第四平面在此未示出,该第四平面倾斜于第一平面20a和第二平面21a伸展。
29.在此,微机械设备1b也构造为具有第一微机械部件2b和第二微机械部件3b的微镜设备。第一部件2b和第二部件3b间接地经由二氧化硅层7a相互连接。第一微机械部件2b在此也具有第一子主体4b和至少一个第二子主体5b。第一子主体4b在第一平面20a中伸展,第二子主体5b在第二平面21中伸展。第二子主体5b布置在到第二微机械部件3b的过渡区域中。在此,第二子主体5b在纵向方向上在第二平面21a中的第二延展尺度26b也大于第一子主体4b在纵向方向上在第一平面20a中的第一延展尺度25b。
30.图2b示出用于制造微机械设备1b的方法。在此也首先提供二氧化硅晶片,该二氧化硅晶片具有硅衬底10b、第二微机械部件3b和二氧化硅层7b,该硅衬底尤其是板形硅衬底。此外,第一蚀刻掩膜6b布置在硅衬底的上侧29b上。在随后的方法步骤16a中,第二蚀刻掩模11b施加到第一蚀刻掩模6b和硅衬底10b的上侧29b上。第二蚀刻掩膜11b尤其是感光漆层。在方法步骤16b中,接下来是各向同性的硅蚀刻步骤,在该硅蚀刻步骤中,这样移除硅衬底10a的材料,使得在硅衬底10b的上侧29b中产生具有定义的形状的凹槽12b。在随后的方法步骤16c中,在蚀刻步骤中移除第二蚀刻掩膜11b。在随后的方法步骤16d中,在沟槽工艺中这样进一步向下蚀刻掉硅衬底10b的材料,使得产生第一微机械部件2b,该第一微机械部件具有根据图2a的第一子主体4b和第二子主体5b。
31.图3a示出微机械设备1c的第三实施方式。与第一实施方式和第二实施方式不同,微机械设备1c在此具有第二子主体5c,该第二子主体的倾斜的外侧30b具有均匀的坡度。因此,作为第二子主体5c的第一子面的该外侧30c完全在第四平面中伸展,该第四平面在此未示出,该第四平面倾斜于第一平面20a和第二平面21a伸展。
32.微机械设备1c在此也构造为具有第一微机械部件2c和第二微机械部件3c的微镜设备。第一部件2c和第二部件3c间接地经由二氧化硅层7a相互连接。在此,第一微机械部件2c也具有第一子主体4c和第二子主体5c。第一子主体4c在第一平面20a中伸展,第二子主体5c在第二平面21中伸展。第二子主体5c布置在到第二微机械部件3c的过渡区域中。在此,第二子主体5c在纵向方向上在第二平面21a中的第二延展尺度26c也大于第一子主体4c在纵向方向上在第一平面20a中的第一延展尺度25c。
33.图3b示出用于制造微机械设备1c的方法。在此也首先提供二氧化硅晶片,该二氧化硅晶片具有硅衬底10c、第二微机械部件3c和二氧化硅层7c,该硅衬底尤其是板形硅衬
底。此外,另外的二氧化硅层作为第一蚀刻掩膜6c布置在硅衬底10c的上侧29c上。在随后的方法步骤17a中,第二蚀刻掩模11c施加到第一蚀刻掩模6c和硅衬底10c的上侧29c上。第二蚀刻掩膜11c尤其是感光漆层。如此涂覆或如此烘烤感光漆,使得该感光漆在第二蚀刻掩膜11c的边缘区域中具有定义的漆侧翼38a。然后,在方法步骤17b中的后续的蚀刻步骤中,将该漆侧翼转移到硅主体中。在随后的方法步骤17c中,在另外的蚀刻步骤中移除第二蚀刻掩膜11c的剩余部分。在随后的方法步骤17d中,在沟槽工艺中这样进一步向下蚀刻掉硅衬底10c的材料,使得产生第一微机械部件2c,该第一微机械部件具有根据图3a的第一子主体4c和第二子主体5c。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。