技术特征:
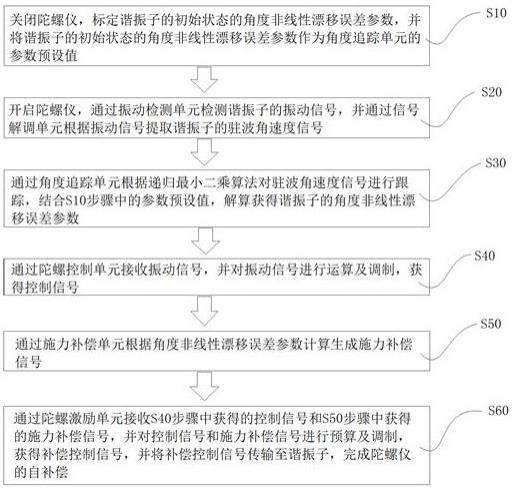
1.一种半球谐振陀螺仪自补偿控制方法,其特征在于,包括如下步骤:s10、关闭陀螺仪,标定谐振子的初始状态的角度非线性漂移误差参数,并将谐振子的初始状态的角度非线性漂移误差参数作为角度追踪单元的参数预设值;s20、开启陀螺仪,通过振动检测单元检测谐振子的振动信号,并通过信号解调单元根据振动信号提取谐振子的驻波角速度信号;s30、通过角度追踪单元根据递归最小二乘算法对驻波角速度信号进行跟踪,结合s10步骤中的参数预设值,解算获得谐振子的角度非线性漂移误差参数;s40、通过陀螺控制单元接收振动信号,并对振动信号进行运算及调制,获得控制信号;s50、通过施力补偿单元根据角度非线性漂移误差参数计算生成施力补偿信号;s60、通过陀螺激励单元接收s40步骤中获得的控制信号和s50步骤中获得的施力补偿信号,并对控制信号和施力补偿信号进行预算及调制,获得补偿控制信号,并将补偿控制信号传输至谐振子,完成陀螺仪的自补偿。2.根据权利要求1所述的半球谐振陀螺仪自补偿控制方法,其特征在于,s10步骤中,关闭陀螺仪的陀螺控制单元,通过转台向陀螺仪输入外界角速度,拟合陀螺仪的初始状态的角度非线性漂移误差参数。3.根据权利要求1所述的半球谐振陀螺仪自补偿控制方法,其特征在于,s20步骤中,驻波角速度信号的计算式为:,其中,为谐振子振动驻波机械角度;为驻波角速度正弦分量幅值项;为驻波角速度正弦分量相位;为驻波角速度常值分量;为时间。4.根据权利要求3所述的半球谐振陀螺仪自补偿控制方法,其特征在于,s30步骤中,递归最小二乘算法的计算式为:,,,,
,其中,为第时刻估计值向量;为第时刻被跟踪值;为第时刻观测值向量;为第时刻增益矩阵;为第时刻更新矩阵;为二阶单位矩阵;为递归最小二乘算法中的遗忘因子;为离散时间。5.根据权利要求1所述的半球谐振陀螺仪自补偿控制方法,其特征在于,s60步骤中,通过陀螺激励单元将补偿控制信号转化为控制激励信号,并将控制激励信号传输至谐振子。6.一种半球谐振陀螺仪自补偿控制系统,用以执行如权利要求1至5任一项所述的半球谐振陀螺仪自补偿控制方法,其特征在于,包括谐振子、振动检测单元、信号解调单元、角度追踪单元、陀螺控制单元、施力补偿单元和陀螺激励单元,所述振动检测单元与所述谐振子电连接,用以检测接收谐振子的振动信号;所述信号解调单元与所述振动检测单元电连接,用以根据振动信号提取谐振子的驻波角速度信号;所述角度追踪单元与所述信号解调单元电连接,用以对驻波角速度信号进行跟踪,并解算获得谐振子的角度非线性漂移误差参数;所述陀螺控制单元与所述振动检测单元电连接,用以接收振动信号,并转换为控制信号;所述施力补偿单元与所述角度追踪单元电连接,用以根据角度非线性漂移误差参数计算生成施力补偿信号;所述陀螺激励单元分别与所述陀螺控制单元、所述施力补偿单元和所述谐振子电连接,用以接收控制信号和施力补偿信号,并转换为补偿控制信号传输至所述谐振子。7.根据权利要求6所述的半球谐振陀螺仪自补偿控制系统,其特征在于,所述谐振子为金属化的熔融石英材质的谐振子。8.根据权利要求6所述的半球谐振陀螺仪自补偿控制系统,其特征在于,所述振动检测单元和所述陀螺激励单元均设置为电极。9.根据权利要求8所述的半球谐振陀螺仪自补偿控制系统,其特征在于,所述电极设置为非接触式电极,所述电极与所述谐振子构成电容器。10.根据权利要求6至9任一项所述的半球谐振陀螺仪自补偿控制系统,其特征在于,所
述信号解调单元、所述角度追踪单元、所述陀螺控制单元和所述施力补偿单元均集成于fpga芯片上。
技术总结
本发明涉及惯性仪表控制技术领域,提供一种半球谐振陀螺仪自补偿控制系统及方法。该方法包括S10、关闭陀螺仪,设定角度追踪单元的参数预设值;S20、开启陀螺仪,通过信号解调单元根据振动信号提取谐振子的驻波角速度信号;S30、通过角度追踪单元解算获得谐振子的角度非线性漂移误差参数;S40、通过陀螺控制单元获得控制信号;S50、通过施力补偿单元根据角度非线性漂移误差参数计算生成施力补偿信号;S60、通过陀螺激励单元获得补偿控制信号,并将补偿控制信号传输至谐振子,完成陀螺仪的自补偿。本发明通过对半球谐振陀螺仪的驻波进行漂移实时解算补偿,保证陀螺仪的性能,提高陀螺仪长期工作的稳定性。长期工作的稳定性。长期工作的稳定性。
技术研发人员:赵小明 田欣然 蒋效雄 赵丙权 丛正
受保护的技术使用者:中国船舶集团有限公司第七〇七研究所
技术研发日:2023.02.14
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。