技术特征:
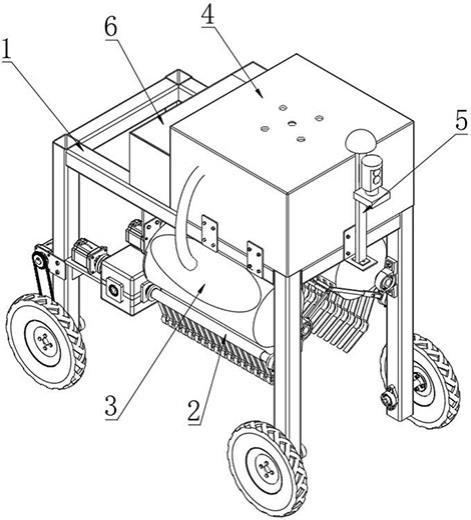
1.一种红花采收机器人,其特征在于,所述红花采收机器人包括多层对称行走架(1)、双向多果球仿形夹持装置(2)、多排花丝刮切装置(3)、缩紧式花丝收集装置(4)、精准对中导航系统(5)和自动采收电控系统(6);所述多层对称行走架(1)包括移动支撑架(1-1)、采收装置安装架(1-2)、果球夹持装置安装架(1-3)和行走装置(1-4);所述移动支撑架(1-1)包括矩形固定框(1-1-1)和其下端面四个角上分别设置的支撑腿(1-1-2);双侧对称布置的采收装置安装架(1-2)分别垂直安装于矩形固定框(1-1-1)左右两侧;双侧对称布置的果球夹持装置安装架(1-3)分别水平安装于两个后侧的支撑腿(1-1-2)上;所述行走装置(1-4)固接于支撑腿(1-1-2)底端;所述双向多果球仿形夹持装置(2)共安装有两个,左右对称的固接于多层对称行走架(1)下侧,包括多果球夹持机构(2-1)、锥齿轮换向机构(2-2)、花枝下压机构(2-3)和夹持驱动电机(2-4);所述多果球夹持机构(2-1)包括夹持条栅轴(2-1-1)和多果球夹持条栅(2-1-2);所述夹持条栅轴(2-1-1)水平布置并与机具的前进方向平行,其前端通过轴承座安装于前侧支撑腿(1-1-2)的后端面上,后端通过联轴器与夹持驱动电机(2-4)连接;所述夹持驱动电机(2-4)通过螺栓固接于果球夹持装置安装架(1-3)上;所述锥齿轮换向机构(2-2)与夹持条栅轴(2-1-1)键连接;所述多果球夹持条栅(2-1-2)包括条栅圆筒(2-1-2-1)和栅条(2-1-2-2);条栅圆筒(2-1-2-1)键连接于夹持条栅轴(2-1-1)外侧,多根栅条(2-1-2-2)沿机具前进方向等间距固接于条栅圆筒(2-1-2-1)外侧;所述栅条(2-1-2-2)由前到后依次为前果球夹持直杆(2-1-2-2-1)、固定果球凹圆弧形杆(2-1-2-2-2)、后果球夹持直杆(2-1-2-2-3),前果球夹持直杆(2-1-2-2-1)和后果球夹持直杆(2-1-2-2-3)与固定果球凹圆弧形杆(2-1-2-2-2)的两端光滑衔接;所述花枝下压机构(2-3)包括电动伸缩杆(2-3-1)和集条杆(2-3-2);前电动伸缩杆(2-3-1)的底端通过轴承与夹持条栅轴(2-1-1)连接,后电动伸缩杆(2-3-1)的底端通过键与锥齿轮换向机构(2-2)连接,前后两个电动伸缩杆(2-3-1)的顶端与集条杆(2-3-2)的两端通过螺纹连接;所述集条杆(2-3-2)包括前连接杆(2-3-2-1)、
ʌ
型下压杆(2-3-2-2)、后连接杆(2-3-2-3);前连接杆(2-3-2-1)和后连接杆(2-3-2-3)一端通过螺栓与电动伸缩杆(2-3-1)连接,另一端与
ʌ
型下压杆(2-3-2-2)的两端光滑衔接;所述多排花丝刮切装置(3)共安装有两个,左右对称的固接于多层对称行走架(1)内,位于双向多果球仿形夹持装置(2)上侧,包括采摘传动轴(3-1)、切割旋刀套筒(3-2)、刮切割刀(3-3)、刮切驱动步进电机(3-4)、进花口(3-5);所述刮切驱动步进电机(3-4)通过螺栓固接在采收装置安装架(1-2)上;采摘传动轴(3-1)水平布置且与机具的前进方向平行,其前端通过轴承座安装在前侧支撑腿(1-1-2)上,后端通过联轴器与刮切驱动步进电机(3-4)的动力输出轴连接;所述采摘传动轴(3-1)与切割旋刀套筒(3-2)前后两端通过轴承连接;多排刮切割刀(3-3)均匀地固接在采摘传动轴(3-1)的周向表面上,位于切割旋刀套筒(3-2)的内部;所述切割旋刀套筒(3-2)表面上设
的1.3~1.6倍;所述固定果球凹圆弧形杆(2-1-2-2-2)圆弧直径d2,其范围为20~24mm,为红花果球球径d3的1~1.2倍,可使分枝进入栅条间隙,并将果球夹持固定至等高直线。7.根据权利要求1所述的一种红花采收机器人,其特征在于,所述多果球夹持条栅(2-1-2)向上转动到固定果球凹圆弧形杆(2-1-2-2-2)与果球根部接触的点到地面的高度为果球固定高度h1时停止转动,果球固定高度h1其范围为700~800mm,在红花植株果球高度分布的中间位置,避免夹持造成的拉扯过度对花枝和果球造成损害,此时固定果球凹圆弧形杆(2-1-2-2-2)与果球根部接触的点到进花口(3-5)的距离为红花果球固定距离l4,其范围为17~19mm,为果球高度h2的0.90~0.95倍,使果球上的花丝完整的喂入进花口(3-5),加强喂入的可靠性。8.根据权利要求1所述的一种红花采收机器人,其特征在于,所述采摘传动轴(3-1)的周向表面上均匀地固接多排刮切割刀(3-3),相邻刮切割刀(3-3)之间的间隔角度为α1,其范围为60
°
~120
°
;所述刮切割刀(3-3)与进花口(3-5)的边缘配合形成单支承切割;所述切割旋刀套筒(3-2)的圆筒长度为l5,其范围为1200~1320mm,为果球分布直径d1的1~1.1倍,可容纳植株上的全部花丝同时喂入,刮切割刀(3-3)的长度与切割旋刀套筒(3-2)的圆筒长度l5相同,可一次性刮切喂入的全部花丝。9.根据权利要求1所述的一种红花采收机器人,其特征在于,所述缩紧收集管(4-4)与切割旋刀套筒(3-2)的内壁光滑衔接,衔接处的长度与切割旋刀套筒(3-2)的圆筒长度l5相同,使切割旋刀套筒(3-2)内刮切后的花丝在负压作用下顺畅的进入缩紧收集管(4-4)。10.一种利用如权利要求1-9任一项所述的一种红花采收机器人的红花梳喂采收方法,其特征在于,包括如下步骤:s1、红花识别和对行行走;所述导航系统(5-2)使机器人完成初步对行后,三维激光雷达(5-1)获取红花植株行的三维点云数据,通过对其三维点云数据进行处理,获取红花植株行中的各红花植株的顶点位置,以当前采摘的本行第一棵红花植株顶点a1与第二棵红花植株顶点a2的连线c1为导航线,判断采收机器人中心线c0与导航线c1的偏差角度并修正使机器人中心线c0与导航线c1重合,沿导航线c1行进到第二棵红花植株的上方,同时识别第二棵植株的顶点a2与第三棵植株顶点a3的连线c2为第三棵植株的导航线,并判断采收机器人中心线c0与导航线c2的偏差角度;此时双向多果球仿形夹持装置2处于初始状态,电动伸缩杆(2-3-1)初始伸缩长度l1,范围为720~740mm;执行步骤s2;s2、红花果球夹持;第一步:所述采收控制系统(6-1)控制右侧电动伸缩杆(2-3-1)的长度由初始伸缩长度l1伸长到电动伸缩杆(2-3-1)与集条杆(2-3-2)的连接处位于植株中心线正上方,左侧电动伸缩杆(2-3-1)保持静止;第二步:所述采收控制系统(6-1)先启动右侧夹持驱动电机(2-4),3~5秒后再启动左侧夹持驱动电机(2-4),多果球夹持条栅(2-1-2)和集条杆(2-3-2)同轴反转,多果球夹持条栅(2-1-2)向上转动,集条杆(2-3-2)向下转动;当右侧集条杆(2-3-2)向下转动到位于红花植株的点云轮廓顶点下方时,右侧电动伸缩杆(2-3-1)的长度收缩回初始伸缩长度l1,用于下压顶部红花花枝;第三步:所述双侧电动伸缩杆(2-3-1)继续向下转动,集条杆(2-3-2)下压红花植株上部的花枝,多果球夹持条栅(2-1-2)继续向上转动,将多果球夹持条栅(2-1-2)上的全部红花果球夹持到固定果球凹圆弧形杆(2-1-2-2-2)中,当右侧多果球夹持条栅(2-1-2)向上转
动到固定果球凹圆弧形杆(2-1-2-2-2)与果球根部接触的点到进花口(3-5)的距离为红花果球固定距离l4时,果球上的花丝通过进花口(3-5)完整的喂入切割旋刀套筒(3-2)内,右侧夹持驱动电机(2-8)停止;随后左侧多果球夹持条栅(2-1-2)向上转动到固定果球凹圆弧形杆(2-1-2-2-2)与果球根部接触的点到进花口(3-5)的距离为红花果球固定距离l4时,左侧夹持驱动电机(2-8)停止,进入步骤s3;s3、红花采摘;所述采收控制系统(6-1)进入采收状态,多排花丝刮切装置(3)的刮切驱动步进电机(3-4)启动,带动刮切割刀(3-3)转动一个间隔角度α1,切割红花花丝;在负压作用下,花丝经花丝输送管(4-4)进入花丝输送管(4-2),并进入花丝收集箱(4-1),完成一次花丝采收;s4、装置复位;花丝采收完毕后,所述采收控制系统(6-1)结束采收状态,刮切驱动步进电机(3-1)关闭,夹持驱动电机(2-8)启动使双向多果球仿形夹持装置(2)回复初始状态,准备进行下一次梳理采收,进入步骤s1。
技术总结
本发明涉及一种红花采收机器人及其采收方法。采收机器人包括多层对称行走架、双向多果球仿形夹持装置、多排花丝刮切装置、缩紧式花丝收集装置、自动采收电控系统、精准对中导航系统;精准对中导航系统获取红花植株行的三维点云数据,从中提取出行导航线和行驶距离,提高自走精度;双向多果球仿形夹持装置集条杆与夹持条栅分别从植株上下方反向转动,将果球夹持至植株中部的等高直线,提高采收效率;多排花丝刮切装置与夹持装置配合,使果球完整喂入并由刮切装置进行单支承切割,提高花丝完整性。本发明提供了一种智能感知、精准对中、双侧梳理、等高喂入、刮切采收的红花采收机器人,提高了红花采收效率,降低了花丝漏采率。降低了花丝漏采率。降低了花丝漏采率。
技术研发人员:张振国 史瑞猛 赵敏义 邢振宇 郭全峰 曾超 杨双平 王帅 李子汉 李潇潇
受保护的技术使用者:新疆农业大学
技术研发日:2022.11.25
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。