1.本发明涉及应变传感器领域,具体涉及一种超敏耦合仿生应变传感器及其制备方法。
背景技术:
2.近几年来,柔性电子设备逐渐成为研究热点,如可穿戴设备、电子皮肤、机器人等。柔性应变传感器是柔性电子设备中不可或缺的一类传感器,通过提高设计与制备技术改善柔性应变传感器的性能,进而促进柔性电子的发展。灵敏度是柔性应变传感器最关键的性能之一,提高其灵敏度可以拓宽传感器的检测范围,使其能够检测到非常微弱的应变信号,例如人的脉搏、心率等。随着仿生学科的快速发展,将仿生学原理应用在柔性应变传感器的设计上不仅可以丰富传感机理,并且可以提高应变传感器的性能。因此,提出一种超敏耦合仿生应变传感器及其制备方法。
技术实现要素:
3.针对现有技术的不足,本发明提出了一种超敏耦合仿生应变传感器及其制备方法。
4.本发明的目的可以通过以下技术方案实现:
5.一种超敏耦合仿生应变传感器,包括:
6.柔弹性衬底;
7.微纳米耦合仿生裂缝阵列,设置在所述柔弹性衬底上,所述微纳米耦合仿生裂缝阵列由n条第一弧线和n条第二弧线组成,所述第一弧线和所述第二弧线以同一个圆心圆周阵列;其中n为大于0的整数;所述微纳米耦合仿生裂缝阵列是指以两种生物特点耦合仿生设计的微纳米尺度的裂缝阵列;
8.电阻层,沉积在所述柔弹性衬底和所述微纳米耦合仿生裂缝阵列上;
9.电极,设置在所述电阻层上。
10.进一步地,所述第二弧线和所述第一弧线镜向对称。
11.进一步地,所述微纳米耦合仿生裂缝阵列的弧线由三点构成:第一点是几何中心点,第二点与几何水平中心线的距离为h,第三点与几何垂直中心线的距离为w。
12.进一步地,所述传感器为长方体,满足c=0.35a、r=0.05a和a》10d;
13.其中,c为所述微纳米耦合仿生裂缝阵列的每条弧线的弦长;a为所述传感器的边长;d为所述传感器的高;r为所述第一弧线和所述第二弧线组成图案的中心的圆形区域的半径。
14.进一步地,所述柔弹性衬底的材料为环氧树脂、聚乙烯、聚偏氟乙烯、聚丙烯、聚苯乙烯、聚矾醚、聚酰亚胺、聚酰胺、热塑性聚氨酯、聚对苯二甲酸乙二醇酯、苯乙烯-丁二烯-苯乙烯嵌段共聚物、天然橡胶、丁腈橡胶、聚二甲基硅氧烷、苯乙烯类热塑性弹性体、热塑性硫化橡胶、硅胶、可降解化石基聚合物ecoflex中的一种或多种。
15.进一步地,所述电阻层的材料为金纳米粒子、银纳米粒子、铜纳米粒子、铂纳米粒子、碳纳米管、石墨烯、炭黑、碳纤维、铝硼合金、铝铬合金、铁锰合金、铝铬钇合金、银铜钯合金中的一种或多种。
16.进一步地,所述电极的材料为金、银、铜、铁、石墨、钢、紫铜、铜钨合金、银钨合金、黄铜、铸铁中的一种或多种。
17.本发明还提供一种如上任一项所述的超敏耦合仿生应变传感器的制备方法,包括以下步骤:
18.使用三维建模软件建立仿生应变传感器的模型,再通过有限元分析软件仿真确定传感器和微纳米耦合仿生裂缝阵列的结构参数;
19.利用复制转移法制备带有微纳米耦合仿生裂缝阵列的柔弹性衬底;
20.将所述柔弹性衬底放入离子溅射仪中镀膜,得到沉积在所述柔弹性衬底和所述微纳米耦合仿生裂缝阵列上的电阻层;
21.在电阻层表面用铜胶带粘贴铜导线电极,得到所述传感器。
22.本发明的有益效果:
23.本发明耦合仿生节肢动物裂缝感受器和向日葵花籽螺旋发散生长规律设计传感器结构,得到的仿生应变传感器具有超高的灵敏度,并且响应时间和恢复时间也非常迅速;而且在微纳米耦合仿生裂缝阵列中心处空出的圆形空白,可以避免应力集中,提高仿生应变传感器的耐久性;本发明的超敏仿生应变传感器结构简单,制备容易,各方面性能俱佳。
附图说明
24.下面结合附图对本发明作进一步的说明。
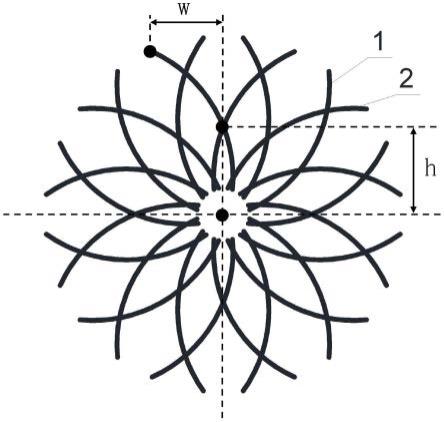
25.图1为本技术的微纳米耦合仿生裂缝阵列结构图;
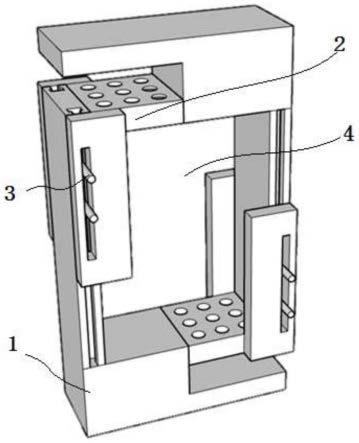
26.图2为本技术的制备完成的超敏耦合仿生应变传感器示意图;
27.图3为本技术的超敏耦合仿生应变传感器微纳米耦合仿生裂缝的超景深形貌图;
28.图4为本技术的超敏耦合仿生应变传感器的电阻变化率随应变变化的测试图;
29.图5为本技术的超敏耦合仿生应变传感器的在应变量为0.1764%下的耐久性循环次数测试图;
30.图6为本技术的超敏耦合仿生应变传感器在应变量0.4%下的的响应时间和恢复时间测试图。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
32.本发明实施例提供一种超敏耦合仿生应变传感器,其中,包括柔弹性衬底,所述柔弹性衬底表面上的微纳米耦合仿生裂缝阵列,沉积在所述柔弹性衬底和所述微纳米耦合仿生裂缝阵列上的电阻层,设置在所述电阻层上的电极;
33.其中所述微纳米耦合仿生裂缝阵列由n条第一弧线1和n条第二弧线2组成,所述第
一弧线1和所述第二弧线2以同一个圆心圆周阵列,n为大于0的整数。
34.实施例
35.超敏耦合仿生应变传感器的制备
36.(1)使用solidworks软件三维建模仿生应变传感器的模型,在次实施例中n=12,通过ansys有限元仿真优化设计参数,得到各方面性能俱佳的仿生应变传感器微纳米耦合仿生裂缝阵列结构设计参数,微纳米耦合仿生裂缝阵列的弧线由三点构成:第一点是几何中心点,第二点与几何水平中心线的距离为h,第三点与几何垂直中心线的距离为w;本实施例中h=0.22,w=0.16。仿生应变传感器模型长宽高分别是1*1*0.1mm,如图1所示。
37.(2)将(1)得到的最佳结构设计参数利用cad绘制微纳米耦合仿生阵列图形,将绘制的图形导入切纸机,在pet薄膜板上切割出耦合仿生结构,pet板的长宽高分别是25*25*1mm。
38.(3)将(2)得到pet板放在匀胶机基板上,将液态环氧树脂ab胶均匀旋涂在pet板表面,匀胶机转速为100r/min,大约旋涂60s,旋涂完毕放入真空干燥箱抽真空20分钟,将旋涂的环氧树脂ab胶内的气泡抽掉,70℃固化大约2小时。液态环氧树脂ab胶配比:a:b=3:1。
39.(4)将(3)固化的环氧树脂ab胶从pet板上剥落,得到带有凸出微纳米耦合仿生阵列图形的环氧树脂模型。
40.(5)将(4)得到的环氧树脂模型放入匀胶机基板上,将液态pdms均匀旋涂在环氧树脂模型表面,匀胶机转速为100r/min,大约旋涂60s,旋涂完毕放入真空干燥箱抽真空20分钟,将旋涂的pdms内的气泡抽掉,80℃固化大约2-3小时。液态pdms配比:前驱体:固化剂=10:1。
41.(6)将(5)固化的pdms从环氧树脂模型上剥落,得到带有微纳米耦合仿生裂缝阵列的pdms柔弹性衬底,柔弹性衬底长宽高约为:25*25*1mm。
42.(7)将(6)得到的柔弹性衬底放入离子溅射仪中镀膜,镀膜材料为纳米银粒子,厚度大约为100nm,得到沉积在所述柔弹性衬底和所述微纳米耦合仿生裂缝阵列上的电阻层。最后在电阻层表面用铜胶带粘贴铜导线电极,得到一种超敏的仿生应变传感器,如图2所示。
43.对该实施例制备的超敏耦合仿生应变传感器的结构进行表征。用超景深数码3d视频显微镜对微纳米耦合仿生裂缝阵列形貌进行表征,如图3所示,裂缝深度大约有80μm,每个裂缝深度大体相等。
44.对制备的超敏耦合仿生应变传感器进行性能测试
45.灵敏度(gf)测试:如图4所示,所制备的超敏耦合仿生应变传感器具有超高的灵敏度,在第一阶段应变量小于0.46%时,灵敏度最大值约为4000,在第二阶段应变量大于0.46%时,灵敏度突然激增,最大值约为60000,说明制备的耦合仿生应变传感器具有超高的灵敏度,并且在非常低的应变量为0.058%情况下仍然有电阻变化,灵敏度大约为2014。
46.耐久性测试:如图5所示,在应变量0.18%下循环拉伸下,超敏耦合仿生应变传感器电阻变化率在7000次循环中比较平稳,说明制备的超敏耦合仿生应变传感器耐久性好,可以在长时间内保持稳定良好的工作状态。
47.响应时间和恢复时间测试:如图6所示,在应变量0.40%下,响应时间为104ms,恢复时间为112ms,响应时间和恢复时间都比较快速,说明制备的超敏耦合仿生应变传感器反
应迅速,性能较好。
48.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。