技术特征:
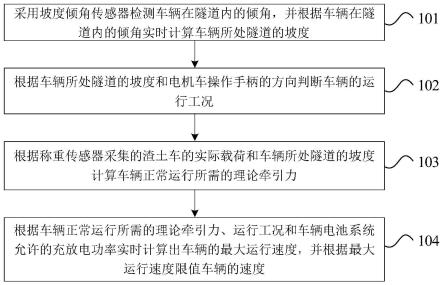
1.一种电机车坡道自动限速的控制方法,其特征在于,包括以下步骤:采用坡度倾角传感器检测车辆在隧道内的倾角,并根据所述车辆在隧道内的倾角实时计算车辆所处隧道的坡度;根据所述车辆所处隧道的坡度和电机车操作手柄的方向判断车辆的运行工况;根据称重传感器采集的渣土车的实际载荷和所述车辆所处隧道的坡度计算车辆正常运行所需的理论牵引力;根据所述车辆正常运行所需的理论牵引力、所述运行工况和车辆电池系统允许的充放电功率实时计算出车辆的最大运行速度,并根据所述最大运行速度限值车辆的速度。2.如权利要求1所述的方法,其特征在于,所述坡度倾角传感器水平安装在电机车的机械结构上,若所述坡度倾角传感器检测到机车头部高于尾部时,判断所述倾角为正,所述坡度也为正,否则判断所述倾角为负,所述坡度也为负。3.如权利要求2所述的方法,其特征在于,所述运行工况包括上坡和下坡,所述根据所述车辆所处隧道的坡度和电机车操作手柄的方向判断车辆的运行工况,包括:若所述坡度为正,所述电机车操作手柄的方向为前进,则判断所述车辆上坡;若所述坡度为正,所述电机车操作手柄的方向为后退,则判断所述车辆下坡;若所述坡度为负,所述电机车操作手柄的方向为前进,则判断所述车辆下坡;若所述坡度为负,所述电机车操作手柄的方向为后退,则判断所述车辆上坡。4.如权利要求3所述的方法,其特征在于,所述根据称重传感器采集的渣土车的实际载荷和所述车辆所处隧道的坡度计算车辆正常运行所需的理论牵引力,包括:m=m1 m2 m3f0=mgωf
i
=mgii=tanθf
j上
=f
i
f0f
j下
=f
i-f0其中,m表示电机车整车质量,m1表示整车空载质量,m2表示装载渣土的重量,m3表示固定数量管片和砂浆的重量,ω表示列车运行持续阻力系数,g表示当地重力加速度,i表示电机车运行的坡度,θ表示电机车运行的倾角,f
i
表示电机车运行实时坡度坡道阻力,f0表示电机车运行实时基本阻力,f
j上
表示电机车上坡运行实时所需牵引力,f
j下
表示电机车下坡运行实时所需牵引力。5.如权利要求1所述的方法,其特征在于,所述车辆电池系统允许的充放电功率的计算过程包括:p
放
=ui
放max
/1000p
充
=ui
充max
/1000其中,p
放
表示电池系统允许的放电功率,p
充
表示电池系统允许的充电功率,u表示电池系统实时电压,i
放max
表示电池系统允许最大持续放电电流,i
充max
表示电池系统允许最大持续充电电流。6.如权利要求4或5所述的方法,其特征在于,所述最大运行速度表示为:v
上max
=p
放
η/f
j上
×
3600
÷
1000
v
下max
=p
充
η/f
j下
×
3600
÷
1000其中,v
上max
表示上坡工况时车辆的允许最大运行速度,v
下max
表示下坡工况时车辆的允许最大运行速度,p
放
表示电池系统允许的放电功率,p
充
表示电池系统允许的充电功率,η表示电机车驱动机构的传动效率,f
j上
表示电机车上坡运行实时所需牵引力,f
j下
表示电机车下坡运行实时所需牵引力。7.一种电机车坡道自动限速的控制装置,其特征在于,包括第一计算模块、判断模块、第二计算模块、限速模块,其中,所述第一计算模块,用于采用坡度倾角传感器检测车辆在隧道内的倾角,并根据所述车辆在隧道内的倾角实时计算车辆所处隧道的坡度;所述判断模块,用于根据所述车辆所处隧道的坡度和电机车操作手柄的方向判断车辆的运行工况;所述第二计算模块,用于根据称重传感器采集的渣土车的实际载荷和所述车辆所处隧道的坡度计算车辆正常运行所需的理论牵引力;所述限速模块,用于根据所述车辆正常运行所需的理论牵引力、所述运行工况和车辆电池系统允许的充放电功率实时计算出车辆的最大运行速度,并根据所述最大运行速度限值车辆的速度。8.如权利要求7所述的装置,其特征在于,所述坡度倾角传感器水平安装在电机车的机械结构上,若所述坡度倾角传感器检测到机车头部高于尾部时,判断所述倾角为正,所述坡度也为正,否则判断所述倾角为负,所述坡度也为负。9.如权利要求8所述的装置,其特征在于,所述运行工况包括上坡和下坡,所述根据所述车辆所处隧道的坡度和电机车操作手柄的方向判断车辆的运行工况,包括:若所述坡度为正,所述电机车操作手柄的方向为前进,则判断所述车辆上坡;若所述坡度为正,所述电机车操作手柄的方向为后退,则判断所述车辆下坡;若所述坡度为负,所述电机车操作手柄的方向为前进,则判断所述车辆下坡;若所述坡度为负,所述电机车操作手柄的方向为后退,则判断所述车辆上坡。10.一种计算机设备,其特征在于,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实现如权利要求1-6中任一所述的方法。
技术总结
本申请提出了一种电机车坡道自动限速的控制方法,包括:采用坡度倾角传感器检测车辆在隧道内的倾角,并根据检测的倾角实时计算车辆所处隧道的坡度;根据计算出的坡度和电机车操作手柄的方向判断车辆的运行工况;根据称重传感器采集的渣土车的实际载荷和计算出的坡度计算车辆正常运行所需的理论牵引力;根据车辆正常运行所需的理论牵引力、运行工况和电池系统允许的充放电功率实时计算出最大运行速度,并根据最大运行速度限值车辆速度。采用上述方案的本发明实现了电机车在不同坡度和不同载荷下运行速度的自动限制,且能有效保护锂电池电芯不会因充放电功率过大而损坏,提升了电机车使用过程中的安全性。电机车使用过程中的安全性。电机车使用过程中的安全性。
技术研发人员:李才洪 钱杨 韩睿 庄元顺 杨鹏 高旭东 梅元元 郭涛 魏芸 焦俊奇
受保护的技术使用者:中铁工程服务有限公司
技术研发日:2022.12.09
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。