1.本发明属于航天器技术领域,涉及一种具有强制退出功能的位置切换装置。
背景技术:
2.位置切换装置是星载遥感器的核心部件,位置切换装置一般为有效负载提供结构支撑及位置切换运动,要求运动位置准确、可靠性高、寿命长、有效负载质量大,限制位置切换装置可靠性的主要因素是其中切换驱动元件、切换传动副可靠性。当有效负载切入到工作位置或切入工作进行到一半后出现运动功能失效,导致有效负载停留在切入或中间位置,将会对星载遥感器其他功能造成极大影响,甚至导致整个星载遥感器任务失败。
3.目前,星载遥感器上常用的位置切换装置大多数没有强制退出功能,部分位置切换装置上装有应急退出机构,该应急退出机构主要由记忆合金棒分离机构和卷簧组成,当位置切换装置切换功能失效后,首先由记忆合金分离机构将位置切换装置驱动组件分离,再由卷簧的势能将有效负载切换至初始位置。该应急退出机构中卷簧在装配时需要预加一定的势能,预加的势能会导致应急退出时产生较大冲击,卷簧在位置切换装置切换过程中反复运动,当位置切换装置寿命较长时卷簧的寿命无法满足,且该类应急退出机构中记忆合金棒分离机构在地面测试试验过程中不可测试。鉴于以上分析可知,亟需一种具备强制退出功能的位置切换装置,提升星载遥感器在轨可靠性的同时提升遥感器的测试覆盖性。
技术实现要素:
4.本发明解决的技术问题是:克服现有技术的不足,提出一种具有强制退出功能的位置切换装置,实现有效负载在固定位置之间切换,并且当发生故障无法完成切换功能时,可通过其强制退出功能使有效负载退出至初始位置,确保有效负载不会对遥感器其他功能或性能产生影响。
5.本发明解决技术的方案是:
6.一种具有强制退出功能的位置切换装置,包括位置切换驱动机构、强制退出联轴组件、强制退出驱动机构、切换装置基座、切换负载转轴、强制退出基座;
7.其中,位置切换驱动机构安装在切换装置基座上;切换负载转轴与位置切换驱动机构连接;强制退出驱动机构安装在强制退出基座上,切换负载转轴通过强制退出连轴组件与强制退出驱动机构连接;强制退出驱动机构通过强制退出基座安装在切换装置基座上;通过切换驱动机构带动切换负载转轴在固定位置之间完成切换运动,由切入和切出位置反馈传感器判断是否切换到位,若切换到位则说明切换装置正常工作,当切入切出位置反馈传感器判断切换不到位时,则通过强制退出驱动机构带动强制退出连轴组件将切换负载转轴强制退回至切出位置,并由切出位置反馈传感器判断强制退出是否到位。
8.在上述的一种具有强制退出功能的位置切换装置,所述位置切换驱动机构包括切换驱动元件、切换传动副、切换驱动基座、切入位置反馈传感器、切出位置反馈传感器;
9.切换驱动元件通过切换传动副带动切换负载转轴运动,并通过切换传动副带动切
换位置感应器在切入位置反馈传感器、切出位置反馈传感器之间运动,直到切入位置反馈传感器或切出反馈位置传感器触发反馈到位信号。
10.在上述的一种具有强制退出功能的位置切换装置,所述强制退出驱动机构包括强制退出驱动元件、强制退出直线运动副、强制退出支撑元件、强制退出传动副、强制退出基座;
11.强制退出驱动元件通过强制退出直线运动副带动强制退出传动副运动,通过强制退出支撑元件对强制退出传动副提供径向支撑。
12.在上述的一种具有强制退出功能的位置切换装置,所述强制退出联轴组件包括主动半轴、从动半轴;
13.强制退出传动副带动主动半轴转动,主动半轴带动从动半轴转动,从动半轴带动切换负载轴转动直到切出反馈位置传感器触发反馈到位信号。
14.在上述的一种具有强制退出功能的位置切换装置,位置切换驱动机构通过切换驱动基座安装在切换装置基座的一侧,强制退出驱动机构通过强制退出基座安装在切换装置基座的另一侧,切换传动副与切换负载转轴连接,强制退出传动副通过强制退出联轴组件与切换负载转轴连接。
15.在上述的一种具有强制退出功能的位置切换装置,所述切换驱动元件、切入位置反馈传感器、切出反馈位置传感器固定安装在切换驱动基座上,切换传动副通过支撑元件支撑在切换驱动基座上。
16.在上述的一种具有强制退出功能的位置切换装置,所述切换驱动元件带动切换传动副转动,切换传动副带动切换负载转轴转动,直到切换传动副上切换位置感应器触发切入位置反馈传感器或切出位置反馈传感器反馈到位信号,完成位置切换运动。
17.在上述的一种具有强制退出功能的位置切换装置,强制退出联轴组件中从动半轴与切换负载转轴连接,主动半轴通过支撑元件支撑在切换装置基座上,强制退出运动副中从动元件与主动半轴连接,从动半轴与主动半轴之间设计有的空回角度。
18.在上述的一种具有强制退出功能的位置切换装置,强制退出驱动元件、强制退出直线运动副、强制退出支撑元件固定安装在强制退出基座上,强制退出传动副中主动元件与强制退出直线运动副连接,强制退出传动副中从动元件与强制退出连轴组件中主动半轴连接;强制退出驱动元件带动强制退出直线运动副运动,强制退出直线运动副带动强制退出运动副运动,强制退出运动副通过强制退出连轴组件中主动半轴带动从动半轴运动,从动半轴带动切换负载转轴转动,同时切换负载转轴带动切换传动副转动,直到切换传动副上切换位置感应器触发切出位置反馈传感器反馈切出到位信号,完成强制退出运动。
19.在上述的一种具有强制退出功能的位置切换装置,位置切换装置的工作过程为:
20.切换驱动元件带动切换传动副转动;
21.切换传动副带动切换负载转轴转动;
22.切换传动副上切换位置感应器触发切入位置反馈传感器或切出位置反馈传感器反馈切换到位信号;
23.强制退出驱动元件带动强制退出直线运动副实现直线运动;
24.强制退出直线运动副带动强制退出传动副中主动元件运动,强制退出支撑副为强制退出传动副主动元件提供径向支撑;
25.强制退出传动副中从动元件带动主动半轴转动,主动半轴带动从动半轴转动;
26.从动半轴带动切换负载转轴转动,切换负载转轴同时带动切换传动副转动;
27.切换传动副上切换位置感应器触发切出位置反馈传感器反馈强制退出到位信号。
28.本发明与现有技术相比的有益效果是:
29.设计的具有强制退出功能的位置切换装置,将有效负载安装至位置切换装置中切换负载转轴上,可实现有效负载在固定位置之间切换运动,并且当位置切换装置中切换功能发生故障无法完成预定切换工作时,可通过强制退出功能使有效负载退出至切出位置,确保当位置切换装置无法正常工作时有效负载不会对遥感器其他功能或性能产生影响。
30.(2)本发明设计的具有强制退出功能的位置切换装置,位置切换驱动机构中切换传动副可以设计调整减速比,实现位置切换驱动机构在轨驱动力矩裕度大于3的设计要求。
31.(3)本发明设计的具有强制退出功能的位置切换装置,强制退出驱动机构中强制退出直线驱动副可以设计调整减速比,实现强制退出驱动机构在轨驱动力矩裕度大于6的设计要求。
32.(4)本发明设计的具有强制退出功能的位置切换装置,强制退出联轴组件中主动半轴和从动半轴的空程角度可以设计调整,同时设计调整强制退出驱动机构中强制退出传动副的传动形式,实现任意角度位置切换装置均可实现强制退出设计要求。
33.(5)本发明具有适应各类星载遥感器有效负载位置切换装置中,且适应于工业化生产。
附图说明
34.图1为本发明位置切换装置主视图;
35.图2为本发明位置切换装置侧视图;
36.图3为本发明位置切换驱动机构示意图;
37.图4为本发明强制退出驱动机构示意图。
具体实施方式
38.下面结合实施例对本发明作进一步阐述。
39.本发明提供了一种具有强制退出功能的位置切换装置,将有效负载安装至位置切换装置中切换负载转轴上,可实现有效负载在固定位置之间切换运动,并且当位置切换装置中切换功能发生故障无法完成预定切换工作时,可通过强制退出功能使有效负载退出至切出位置,确保当位置切换装置无法正常工作时有效负载不会对遥感器其他功能或性能产生影响。本发明设计出的具有强制退出功能的位置切换装置具有可靠性高、驱动能力强、强制退出功能测试覆盖性全面等优点,从而解决了星载遥感器有效负载位置切换在轨可靠性及测试覆盖性问题。
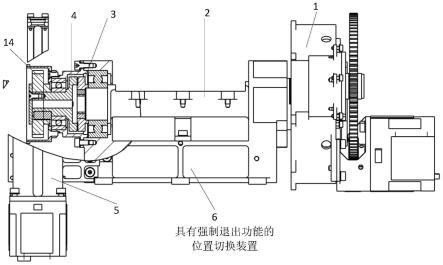
40.具有强制退出功能的位置切换装置,如图1、图2所示,具体包括位置切换驱动机构、强制退出联轴组件、强制退出驱动机构、切换装置基座6、切换负载转轴2、强制退出基座5;
41.其中,位置切换驱动机构安装在切换装置基座6上;切换负载转轴2与位置切换驱动机构连接;强制退出驱动机构安装在强制退出基座5上,切换负载转轴2通过强制退出连
轴组件与强制退出驱动机构连接;强制退出驱动机构通过强制退出基座5安装在切换装置基座6上;通过切换驱动机构带动切换负载转轴2在固定位置之间完成切换运动,由切入和切出位置反馈传感器判断是否切换到位,若切换到位则说明切换装置正常工作,当切入切出位置反馈传感器判断切换不到位时,则通过强制退出驱动机构带动强制退出连轴组件将切换负载转轴2强制退回至切出位置,并由切出位置反馈传感器判断强制退出是否到位。
42.如图3所示,位置切换驱动机构包括切换驱动元件7、切换传动副8、切换驱动基座1、切入位置反馈传感器9、切出位置反馈传感器10;
43.切换驱动元件7通过切换传动副8带动切换负载转轴2运动,并通过切换传动副8带动切换位置感应器在切入位置反馈传感器9、切出位置反馈传感器10之间运动,直到切入位置反馈传感器9或切出反馈位置传感器10触发反馈到位信号。
44.如图4所示,强制退出驱动机构包括强制退出驱动元件11、强制退出直线运动副12、强制退出支撑元件13、强制退出传动副14、强制退出基座5;
45.强制退出驱动元件11通过强制退出直线运动副12带动强制退出传动副14运动,通过强制退出支撑元件13对强制退出传动副14提供径向支撑。
46.强制退出联轴组件包括主动半轴4、从动半轴3;
47.强制退出传动副14带动主动半轴4转动,主动半轴4带动从动半轴3转动,从动半轴3带动切换负载轴2转动直到切出反馈位置传感器10触发反馈到位信号。
48.位置切换驱动机构通过切换驱动基座1安装在切换装置基座6的一侧,强制退出驱动机构通过强制退出基座5安装在切换装置基座6的另一侧,切换传动副8与切换负载转轴2连接,强制退出传动副通14过强制退出联轴组件与切换负载转轴2连接。
49.切换驱动元件7、切入位置反馈传感器9、切出反馈位置传感器10固定安装在切换驱动基座1上,切换传动副8通过支撑元件支撑在切换驱动基座上1。
50.切换驱动元件7带动切换传动副8转动,切换传动副8带动切换负载转轴2转动,直到切换传动副8上切换位置感应器触发切入位置反馈传感器9或切出位置反馈传感器10反馈到位信号,完成位置切换运动。
51.强制退出联轴组件中从动半轴3与切换负载转轴2连接,主动半轴4通过支撑元件支撑在切换装置基座6上,强制退出运动副14中从动元件与主动半轴4连接,从动半轴3与主动半轴4之间设计有的空回角度。
52.强制退出驱动元件11、强制退出直线运动副12、强制退出支撑元件13固定安装在强制退出基座5上,强制退出传动副14中主动元件与强制退出直线运动副12连接,强制退出传动副14中从动元件与强制退出连轴组件中主动半轴4连接;强制退出驱动元件11带动强制退出直线运动副12运动,强制退出直线运动副12带动强制退出运动副14运动,强制退出运动副14通过强制退出连轴组件中主动半轴4带动从动半轴3运动,从动半轴3带动切换负载转轴2转动,同时切换负载转轴2带动切换传动副8转动,直到切换传动副8上切换位置感应器触发切出位置反馈传感器10反馈切出到位信号,完成强制退出运动。
53.位置切换装置的工作过程为:
54.切换驱动元件7带动切换传动副8转动;
55.切换传动副8带动切换负载转轴2转动;
56.切换传动副8上切换位置感应器触发切入位置反馈传感器9或切出位置反馈传感
器10反馈切换到位信号;
57.强制退出驱动元件11带动强制退出直线运动副12实现直线运动;
58.强制退出直线运动副12带动强制退出传动副14中主动元件运动,强制退出支撑副13为强制退出传动副14主动元件提供径向支撑;
59.强制退出传动副14中从动元件带动主动半轴4转动,主动半轴4带动从动半轴3转动;
60.从动半轴3带动切换负载转轴2转动,切换负载转轴2同时带动切换传动副8转动;
61.切换传动副8上切换位置感应器触发切出位置反馈传感器10反馈强制退出到位信号。
62.具有强制退出功能的位置切换装置主要由切换驱动基座1、切换负载转轴2、从动半轴3、主动半轴4、强制退出基座5、切换装置基座6、切换驱动元件7、切换传动副8、切入位置反馈传感器9、切出位置反馈传感器10、强制退出驱动元件11、强制退出直线运动副12、强制退出支撑元件13、强制退出传动副14等组成。位置切换驱动机构通过切换驱动基座1安装在切换装置基座6的一侧,强制退出驱动机构通过强制退出基座5安装在切换装置基座6的另一侧,切换传动副8与切换负载转轴2连接,强制退出传动副通14过强制退出联轴组件与切换负载转轴2连接。
63.如图1所示,切换驱动元件7、切入位置反馈传感器9、切出反馈位置传感器10固定安装在切换驱动基座1上,切换传动副8通过支撑元件支撑在切换驱动基座上1。由切换驱动元件7带动切换传动副8转动,切换传动副8带动切换负载转轴2转动,直到切换传动副8上切换位置感应器触发切入位置反馈传感器9或切出位置反馈传感器10反馈到位信号,完成位置切换运动。
64.由图1、图2所,强制退出驱动元件11、强制退出直线运动副12、强制退出支撑元件13固定安装在强制退出基座5上,强制退出传动副14中主动元件与强制退出直线运动副12连接,强制退出传动副14中从动元件与强制退出连轴组件中主动半轴4连接。由强制退出驱动元件11带动强制退出直线运动副12运动,强制退出直线运动副12带动强制退出运动副14运动,强制退出运动副14通过强制退出连轴组件中主动半轴4带动从动半轴3运动,从动半轴3带动切换负载转轴2转动,同时切换负载转轴2带动切换传动副8转动,直到切换传动副8上切换位置感应器触发切出位置反馈传感器10反馈切出到位信号。
65.优选实施例如下:
66.1实施例中有效负载为黑体,重量2.3kg,口径φ850mm,质心距转轴距离450mm,位置切换驱动机构驱动力矩裕度大于3,位置切换角度92
°
,位置切换精度优于
±
0.5
°
,位置切换时间优于8s,强制退出驱动机构驱动力矩裕度大于6,强制退出时间优于60s,位置切换机构重量及外形包络要求。
67.(2)驱动电机选用j45byg450步进电机,步进电机驱动力矩为0.20nm(20hz~150hz)、步距角为1.8
°
。
68.(4)根据负载重量、质心至转轴距离、位置切换驱动力矩裕度要求,驱动传动副减速比设计为24.45,驱动力矩裕度可达。
69.(5)根据切换位置精度要求,位置反馈传感器选择霍尔开关元件,切入/切出位置反馈传感器距离转轴中心50mm,位置切换精度可达
±
0.2mm。
70.(6)根据负载重量、质心至转轴距离、强制退出驱动力矩裕度要求,强制退出驱动传动副导程选择为1,强制退出驱动力矩裕度可达。
71.(7)具有强制退出功能的位置切换装置完成了功能及性能测试,性能测试结果如表1所示。
72.表1具有强制退出共能的位置切换装置性能测试表
[0073][0074]
本发明通过对具有强制退出共能的位置切换装置性能测试数据分析,该位置切换装置功能及性能均可测,位置切换角度为92
°
,切换驱动力矩裕度可达7.8,强制退出驱动力矩裕度可达12.3,位置切换精度可达0.2度,位置切换时间7.78s,强制退出时间55s,位置切换装置的性能得到了检验。
[0075]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。