1.本发明涉及过程阀领域的进展。
背景技术:
2.现有技术的问题通过根据请求保护范围1的张紧组件和根据另一请求保护范围的过程阀来解决。
技术实现要素:
3.本说明书的第一方面涉及一种张紧组件,该张紧组件包括具有用于刚性连接到阀体的接口的外壳、支撑在外壳上的传动装置和布置在传动装置的输出上的张紧元件,该张紧元件包括被设计用于将过程阀的隔膜的横向的外轴环夹紧在张紧元件和阀体之间的接触表面。
4.所提出的解决方案形成了无工具、(半)自动化的基础,从而改进了隔膜的张紧以产生外部密封性。
5.在张紧组件内部发生的隔膜张紧使得可以设计张紧组件的表面以及待与张紧过程分离的过程阀。这种获得的设计自由度意味着可以设计表面从而提高过程阀的可清洁性。
6.而且,由于所提出的解决方案,先前有关张紧隔膜的工作被替换和改进,这不仅简化了过程阀的服务过程,而且使它们能够更快地执行。
7.此外,所提出的解决方案在阀体的接口的设计中产生了自由度,因为隔膜不必在张紧组件布置在阀体上的同时被张紧。
8.所提出的解决方案还允许在外轴环的过程中均匀地张紧隔膜,这意味着可以增加隔膜的使用寿命。
9.与纯弹簧预加载系统相比,还可以根据客户或特定要求限定张紧状态设置。通过这种方式可以将隔膜的张紧调节到不同的操作压力。
10.一个有利实施例的特征在于,张紧组件将驱动器的基本上旋转运动借助于传动装置转换成张紧元件沿调节轴线定向的平移运动。
11.传动装置允许更好地计量施加到隔膜外轴环的张紧,从而避免对于隔膜的材料和应用来说过度的张紧,并增加隔膜的使用寿命。
12.一个有利实施例的特征在于,传动装置被设计为自锁定的。
13.这意味着在隔膜的外轴环上保持调节后的张紧,而无需永久致动驱动器。
14.由于传动装置的自锁定效果,当驱动器未被致动时,隔膜保持夹紧,这确保过程阀的安全运行。
15.一个有利实施例的特征在于,张紧组件包括通孔,该通孔沿调节轴线延伸穿过张紧组件。
16.穿过张紧组件的通道允许所述组件布置在阀驱动器和阀体之间,其中阀杆穿过通
道。
17.一个有利实施例的特征在于,张紧组件包括传感器单元,该传感器单元被设计为提供表征作用于隔膜的外轴环的张紧的至少一个信号。
18.传感器单元可以提供表征作用于隔膜的张紧的信号。因此,可以使用该张紧组件调节或控制张紧。这允许隔膜的外轴环自动张紧和松弛,并在外部永久密封。此外,隔膜更换和隔膜安装借助于隔膜外轴环的自动张紧和松弛来简化和加速。以特别有利的方式,信号的使用改进或允许无工具和半自动或全自动张紧隔膜。因此,无需额外工具即可在短时间内清洁、更换或维修过程阀。这在制药和食品工业中特别有利。
19.一个有利实施例的特征在于,传感器单元包括传感器,该传感器被布置为固定到外壳上,并且该传感器提供表征张紧元件的位置从而表征作用于隔膜外轴环的张紧的信号。
20.这样,例如可以进行非接触式测量。此外,可以以成本低廉且结构简单的方式进行该位置测量。
21.一个有利实施例的特征在于,张紧组件包括评估单元,该评估单元被设计为基于至少一个信号来操作驱动器。
22.因此,评估单元允许自动张紧和松弛隔膜的外轴环。
23.一个有利实施例的特征在于,评估单元被设计为基于至少一个信号和基于另一信号,尤其是张紧信号或松弛信号,来致动驱动器以张紧或松弛隔膜的外轴环。
24.本说明书的第二方面涉及一种包括根据前述方面的张紧组件的过程阀,该张紧组件布置在阀驱动器和阀体之间。
附图说明
25.在图中:
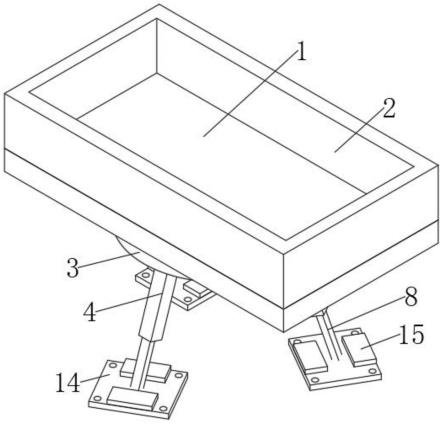
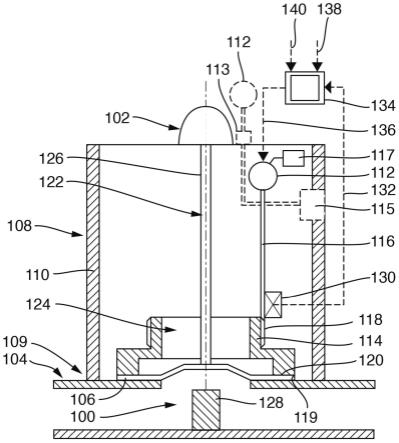
26.图1示意性地示出了具有驱动器、阀体、隔膜和张紧组件的过程阀;
27.图2示出了具有张紧元件和隔膜的张紧组件;和
28.图3示出了具有蜗杆传动的张紧组件的另一个实施例;
29.图4示意性地示出了具有布置在驱动器、张紧组件和驱动杆之间的可切换联轴器的过程阀;和
30.图5示出了用于操作根据图4的过程阀的状态转换图。
具体实施方式
31.图1是具有阀驱动器102、阀体104、隔膜106和张紧组件108的过程阀100的示意性剖视图。所示的过程阀100是隔膜阀;然而,本说明书中说明的技术措施的功能可以很容易地转移到其他类型的阀,诸如座阀,其中关闭体和隔膜分开以实现外部密封。
32.张紧组件108包括外壳110,外壳110借助于接口109刚性地布置在过程阀100的阀体104上。该接口可以使用相互接合的螺纹、卡口连接或其他可拆卸类型的紧固来实现。此外,固定到外壳110的驱动器112和张紧元件114以及传动装置116布置在张紧组件108的外壳110内。驱动器112例如被设计为能使用或不使用工具进行操作的电动机、气动驱动器或手动驱动器。示意性示出的传动装置116连接到驱动侧的驱动器112并且包括在输出侧的,
例如为梯形螺纹的形式的螺纹118。传动装置116可以被设计为应变波传动装置、摆线传动装置、行星传动装置或圆柱形传动装置。
33.张紧元件114借助于传动装置116联接到驱动器112。张紧元件114借助于面向隔膜106的环形接触表面119而将可调节的张紧施加到围绕隔膜106的内部功能的横向的外轴环120。传动装置116将驱动器112的旋转运动转换成张紧元件114沿调节轴线122的平移运动,结果,对隔膜106的横向的外轴环120施加的张紧增加或减少。传动装置116被设计成用张紧元件114自锁定,以便保持对隔膜106的外轴环120施加的调节张紧而驱动器112不被致动。
34.此外,张紧组件108包括通孔124,该通孔124沿调节轴线122延伸穿过张紧组件108和张紧元件114。通孔124允许张紧组件108附接在过程阀100和阀驱动器102之间,用于驱动过程阀100的隔膜106的驱动杆126延伸穿过通孔124。驱动杆126在阀驱动器侧联接到阀驱动器102并且在阀侧连接到隔膜106。这使得可以借助于阀驱动器102来打开和关闭阀座128和隔膜106之间的流体通道。
35.此外,张紧组件108包括传感器单元130。传感器单元130包括产生信号132的传感器,该信号表征作用于隔膜106的外轴环120的张紧并且被提供给评估单元134。基于信号132,评估单元134确定用于操作驱动器112的致动信号136。
36.为了张紧隔膜106的外轴环120,向评估单元134提供张紧信号138,并且如果需要,还提供期望值或阈值。驱动器112相应地由评估单元134致动以张紧隔膜106的外轴环120,直到信号132达到表征期望张紧力的期望值或阈值。
37.为了松弛隔膜106的外轴环120,向评估单元134提供松弛信号140,并且如果需要,还提供期望值或阈值。驱动器112相应地由评估单元134致动以松弛隔膜106的外轴环120,直到信号132达到表征没有张紧力或减小的张紧力的期望值或阈值。
38.在一个实施例中,张紧组件108不包括传感器单元130。在这种情况下,张紧元件114的限定末端位置由被布置成固定到外壳110的止动件提供。如果张紧元件114碰到这些末端止动件中的一个,则当超过电机电流时,驱动器112关闭。
39.在基于前述实施例的实施例中,设置传感器单元130。用于致动驱动器112的信号136基于过电流监测和基于信号136来确定,以便提高运行可靠性。
40.如果驱动器112是电动机,则在一个实施例中,张紧组件108包括电池或蓄电池形式的应急电源117,以便能够在维护的情况下操作驱动器112而无需使用外部电源。
41.在一个实施例中,驱动器112位于张紧组件108的外部(以虚线示出)而不是其内部。为此,张紧组件108包括用于传动装置116的传动装置接口113。接口113可以位于如图所示的张紧组件108的朝向驱动器102的区域中。
42.附加地或替代地,传动装置接口115横向地布置在外壳110上并且可从外部接近。与驱动器112不同的手动、电动或气动驱动器可以经由传动装置接口115连接,例如用于维护目的。
43.图2示出了作为图1中示意性示出的张紧组件108的一个实施方案的张紧组件108。张紧组件108经由张紧元件114将可调节的张紧施加到围绕隔膜106的内部功能区域的横向的外轴环120。张紧组件108包括外壳110、驱动器112(在这里被设计为电动机)、传动装置116和张紧元件114。
44.驱动器112布置在外壳110内以固定到所述外壳110。驱动器112联接到传动装置
116。传动装置116包括阀侧的轴承202和由轴承202支撑的环形齿轮204,使得其绕调节轴线122在两个旋转方向上可旋转地移动。传动装置116被设计成行星传动装置的形式并且包括行星架206,以及行星齿轮208和固定到外壳110的环形齿轮210,行星架206被安装成使得其围绕调节轴线可旋转地移动。驱动器112可旋转地驱动行星架206和布置在其上的行星齿轮208围绕调节轴线122。行星齿轮208在静止的环形齿轮210上滚动,从而使环形齿轮204旋转。
45.例如,安装在传动装置116中的齿轮的齿数可以如下:驱动器112包括10个齿;行星架206包括95个齿;行星齿轮208包括28个齿,静止的环形齿轮210包括106个齿;环形齿轮204包括104个齿。驱动器112的旋转方向的改变相应地改变了环形齿轮204的旋转方向,从而减小或增加了对隔膜106的外轴环120施加的张紧,因为张紧元件114相应地以平移方式移动。
46.张紧元件114以其接触表面119压在隔膜106的外轴环120上。张紧元件114被安装成不能借助于张紧元件114与外壳110的互锁连接而相对于外壳110绕调节轴线122旋转,并且借助于沿调节轴线122定向的外螺纹212,特别是30x2mm梯形螺纹,联接到环形齿轮204,环形齿轮204的相应内螺纹接合在该梯形螺纹中。
47.张紧元件114和外壳110例如通过外壳110上的平行于调节轴线延伸的凸起轮廓和在张紧元件114中相应设计的槽互锁地连接以阻止张紧围绕调节轴线122的旋转并允许向调节轴线122的两个方向平移。借助于相互接合的螺纹,环形齿轮204的旋转运动被转换成张紧元件114沿调节轴线122的平移运动。对隔膜106的外轴环120施加的张紧借助于张紧元件114的这种平移运动来调节。螺纹212被设计为自锁定的,从而保持对隔膜106的外轴环120的调节张紧而无需进一步致动张紧组件108。
48.张紧组件108包括通孔124,通孔124沿调节轴线122延伸穿过张紧组件108和张紧元件114。通孔124允许张紧组件108附接在阀驱动器102和过程阀100之间,用于驱动过程阀100的隔膜106的驱动杆126从阀驱动器102延伸穿过通孔124并固定到隔膜106上的接收装置214。
49.此外,张紧组件108包括传感器单元130,该传感器单元130包括传感器电路板,该传感器电路板例如刚性连接到外壳110并且被设计用于张紧元件114的直接或间接位置测量。传感器单元130包括例如霍尔传感器或电位器。传感器电路板上可以设置其他具有不同测量原理的传感器。
50.传感器单元130允许借助于位置测量更精确地调节由张紧元件114施加到隔膜106的外轴环120的张紧。图1中的信号132表征上述张紧。此外,可以使用传感器单元130根据隔膜106的当前夹持状态来致动张紧组件108。
51.例如,评估单元134被设计成通过驱动器112的致动和张紧元件114的随后运动来增加对隔膜106的外轴环120施加的张紧,以抵消泄漏。
52.当然,其他传感器概念也是可以想到的,诸如将用于力测量的应变仪特别地附接到张紧元件114或螺纹118,以便提供图1的表征对外轴环的张紧的信号132。可替代地或附加地,还可以设想将压电元件作为传感器附接到螺纹118或张紧元件114的面向横向的外轴环120的表面或隔膜106的横向的外轴环120,以提供图1的表征对隔膜106的外轴环120的张紧的信号132。结果,图1的信号132可以被提供给图1的评估单元134。
53.图3显示了图2的张紧组件108,具有传动装置116的替代实施方案。该实施方案包括齿轮传动装置形式的传动装置116,其包括齿轮对或多个齿轮对302以及至少一个蜗杆驱动器304a、304b。形成驱动器112的电动机306a、306b(在图中不可见)经由相关的蜗杆驱动器304a、304b将其扭矩引入到传动装置116中。蜗杆驱动器304a由电动机306a围绕垂直于调节轴线122延伸的轴线308可旋转地驱动。结果,该旋转围绕平行于调节轴线122定向的轴线311传递到第一齿轮对302。
54.此外,齿轮传动装置的环形齿轮204由薄截面轴承310支撑,从而阻止沿调节轴线122的平移自由度,并允许环形齿轮204绕调节轴线122在两个旋转方向上旋转。
55.图4示意性地显示了过程阀100的另一个实施方案。与图1相比,在例如为电动机的驱动器102、张紧组件108和驱动杆126之间存在可切换联接器400。在该实施例中省略了前面图中所示的驱动器112,从而节省了成本和空间。图5显示了一个状态转换图,下面也会提到。
56.可切换联轴器400选择性地将引入到联轴器400中的扭矩引入到驱动杆126或传动装置116中。驱动器侧的轴402由阀驱动器102驱动并且例如被设定为旋转运动。轴402的扭矩被引入到联轴器400中。
57.在运行状态b下,用于阀驱动器102的致动信号s_102基于提供的调节信号s_126进行操作。调节信号s_126代表驱动杆126的期望位置,因此代表隔膜106的可移动部分的期望位置。
58.在安装状态m下,致动信号s_102基于传感器信号132并且基于张紧信号138或松弛信号140来进行操作。
59.例如,当传感器信号132指示隔膜106的横向区域没有被充分张紧时,防止从安装状态m到操作状态b的改变。这可以例如通过将传感器信号132与阈值进行比较来执行。
60.例如,当调节信号s_102指示驱动杆126处于隔膜106压在阀座128上的位置时,防止从操作状态b到安装状态m的改变。
61.在运行状态b和安装状态m期间,用于在两个驱动输出之间切换的信号s_400的输出被评估单元434阻断。更确切地,在从运行状态b到安装状态m的第一过渡状态u1中,评估单元434将驱动杆126转移到安装位置,在这种情况下,轴402以力传递或扭矩传递的方式连接到驱动杆126,并且以非力传递连接到传动装置116。驱动杆126保持在相关位置而不从联轴器400引入扭矩。在驱动杆126到达安装位置后,联轴器400经由信号s_400致动,从而轴402以力传递的方式连接到传动装置116而不是驱动杆122。只有这样才会改变到安装状态m,其中控制信号s_102确定隔膜106的横向区域的张紧。
62.例如,经由评估单元434处的单独信号(未示出),开始向第一过渡状态的过渡。例如,可以在过程阀上设置手动操作元件以产生该信号。
63.评估单元434借助于过渡状态u2将过程阀100从安装状态m转变为操作状态b。在第二过渡状态u2中,评估单元434基于传感器信号132检查隔膜106的横向区域是否被充分张紧。如果不是这种情况,则阻止到操作状态b的改变。然而,如果是这种情况,则首先借助于信号s_400操作联轴器400,使得驱动器102和张紧组件108之间的扭矩传递连接被分离,并且在驱动器102和和驱动杆126之间的力传递连接建立,然后执行到操作状态b的改变。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。