一种用于复杂零部件的3d视觉识别与测量智能装置
技术领域
1.本实用新型涉及生产输送线上的抓件放件装置,尤其涉及一种能够实现产线全自动生产和检测,有利于提升产品质量并且能够减少工人劳动强度和保障工人生命安全的用于复杂零部件的3d视觉识别与测量智能装置。
背景技术:
2.目前,随着工业产线规模越来越大,对于产线智能化的要求越来越高,机器人只是完成点到点的任务动作,在一些复杂零部件的输送过程中无法严格限定零部件的姿态,通常需要借助人工或夹具实现定位,这样一来,生产线上的成本就提高了,满足不了现代产线对于产线高柔性化的要求,另外,在零部件完成焊接后,目前产品的焊缝质量一般是通过人工检测与机器配合等方式实现,无法实现高精度高智能的检测,满足不了现代生产线高节拍高智能化的需求。
3.传统的复杂零部件工件转运和判定的主要动作为:人工上件,通过输送机输送至指定位置,通过机构或人工校正工件位置,机器人抓取零部件放置指定位置,再通过机构或人工校正位置输送至下一工位,但这样的方式通常需要大量的人工工位,工人劳动强度大而且具有一定的危险性,在这种情况下,搬运机器人难以顺利高效的完成工作任务,无法完成高节拍下的全自动化生产,而且在零部件焊接完成后需要对复杂零部件进行检测,由于产品的复杂性,一般的测量机器无法精确检测出质量,传统的方法是通过人工与测量机器的配合实现复杂零部件的检测,但是这样的方式效率较低,而且受制于人工工艺水平,很容易出现不合格的产品流出;专利名称为一种智能识别抓取装置、专利号为zl201420274164.9、公开日期为2014-10-15的中国实用新型专利,其涉及机器人及其使用工具领域,手部工具框架的内部设置有伺服电机,伺服电机的一侧设置有伺服电机连接板,伺服电机的右端设置有联轴器,联轴器的右端设置有丝杠和丝杠滑块,手部工具框架的内部下方两边分别设置有位置传感器和力传感器,位置传感器通过位移传感器连接板与手部工具框架连接,力传感器通过力感器连接板与丝杠滑块连接,手部工具框架上设置有相机。它能克服现有技术的弊端,结构设计紧凑合理,操作简单,使用方便,不仅提高了装配节拍,还增强了机器人在环境不利情况下的可操作性,可抓取不同型号的产品,广泛应用于行业内。然而,该专利仅具有基本的识别、抓取、装配零部件的功能,缺乏对于复杂零部件的精确检测、筛选、送回返修等操作,功能较为单一,无法很好的实现用机器人代替人工操作,不能有效的减少人工工位,工作效率较为低下,满足不了现代生产线的高节拍、高智能化的需求。
4.如何解决上述难题,成为亟待解决的技术问题。
技术实现要素:
5.本实用新型的目的在于提供一种能够实现产线全自动生产和检测,有利于提升产品质量并且能够减少工人劳动强度和保障工人生命安全的用于复杂零部件的3d视觉识别
与测量智能装置。
6.为实现上述目的,本实用新型采用了如下技术方案:
7.本实用新型提供的一种用于复杂零部件的3d视觉识别与测量智能装置,包括工件、皮带输送线和能够将所述工件输送至皮带输送线一端的agv送料装置,在靠近所述agv送料装置的皮带输送线一端上设有送料机器人,在所述皮带输送线的另一端设有检测台,在远离所述皮带输送线的检测台一侧设有焊接台,以及,在靠近所述检测台的皮带输送线上方设有3d视觉装置,在所述皮带输送线的侧面设有搬运机器人,该搬运机器人上设有抓手装置,在所述搬运机器人的下端设有合格输送线和返修输送线。
8.进一步地,所述皮带输送线包括安装框架,在所述安装框架上沿该安装框架的长度方向设有平皮带,在靠近所述送料机器人的平皮带一端上设有电机,该电机的输出轴与主传动轴连接在一起,在所述平皮带的另一端设有从传动轴,在靠近所述从传动轴的安装框架侧面装设有感应器支架,所述感应器支架上装设有能够感应所述皮带输送线上工件位置的第一感应器。
9.进一步地,所述抓手装置包括第一法兰,在所述第一法兰上装设有八角管,所述第一法兰和八角管组合形成四方型框架结构,在所述八角管的一侧装设有能够对所述抓手装置实现气路控制的气路控制总成,在所述八角管上装设有角座,所述角座上装设有夹紧气缸,在所述夹紧气缸上装设有压块,以及,在所述角座上还装设有能够与压块配合完成夹紧动作的托块。
10.进一步地,在所述角座上还装设有双导杆气缸,所述双导杆气缸的活动端装设有定位销,在所述角座上还装设有能够感应零部件的第二感应器。
11.进一步地,所述3d视觉装置包括装设在所述皮带输送线一侧的立柱,在所述立柱上装设有安装支柱,在所述安装支柱的一侧设有第一安装底座,在所述第一安装底座内装设有第一丝杆,在所述第一安装底座的一端设有第一伺服,所述第一伺服通过一第一联轴器与所述第一丝杆连接在一起,在所述第一丝杆的滑动端设有能够随该第一丝杆进行左右滑动的第一滑动板,在所述第一滑动板上装设有第一感应片,在所述安装支柱的上方设有拖链底板,在所述第一滑动板上设有拖链安装板,所述拖链底板和拖链安装板通过一拖链连接在一起,其中,所述拖链的一端设置在所述拖链底板上,所述拖链的另一端设置在所述拖链安装板上。
12.进一步地,在所述第一安装底座的一侧还设有第一感应安装座,在所述第一感应安装座上装设有能够感应所述第一感应片位置的第三感应器和第四感应器。
13.进一步地,在所述第一滑动板上还设有能够随该第一滑动板运动的第二安装底座,在所述第二安装底座内设有第二丝杆,在所述第二安装底座的一端设有第二伺服,所述第二伺服通过一第二联轴器与所述第二丝杆连接在一起,在所述第二丝杆的滑动端设有能够随该第二丝杆进行上下移动的第二滑动板,所述第二滑动板上设有视觉检测盒和第二感应片。
14.进一步地,在所述第二安装底座的一侧还设有第二感应安装座,在所述第二感应安装座上设有能够感应所述第二感应片位置的第五感应器和第六感应器。
15.由于采用了上述结构,本实用新型具有的有益效果如下:
16.本实用新型一种用于复杂零部件的3d视觉识别与测量智能装置,agv送料装置能
够将工件运送至皮带输送线附近,然后送料机器人将工件抓取至皮带输送线上,实现了机器人装置的自动抓取与放件,提高工作效率,从而3d视觉装置能够识别确定皮带输送线上工件的空间位置并传输给搬运机器人,搬运机器人通过抓手装置将工件抓取至焊接台进行工艺焊接,在焊接完成后搬运机器人将工件抓取至检测台,此时3d视觉装置继续对检测台上的工件进行测量,若工件焊接质量合格,3d视觉装置将信号传输给搬运机器人从而搬运机器人将工件抓取至合格输送线,合格输送线将工件输送至下一个工艺工序中去,若工件焊接质量不合格,3d视觉装置将信号传输给搬运机器人从而搬运机器人将工件抓取至返修输送线,返修输送线将工件输送至初始工位进行返修,能够代替人力,减少工人的劳动强度,降低工人的工作危险程度,保障工人生命安全,同时在利用3d视觉装置的功能实现对工件的质量把控,能够进一步提升产品的良品率和质量,实现产线的全自动生产和检测,因此本实用新型一种用于复杂零部件的3d视觉识别与测量智能装置能够实现产线全自动生产和检测,有利于提升产品质量并且能够减少工人劳动强度和保障工人生命安全。
17.通过以下的描述并结合附图,本实用新型将变得更加清晰,这些附图用于解释本实用新型的实施例。
附图说明
18.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
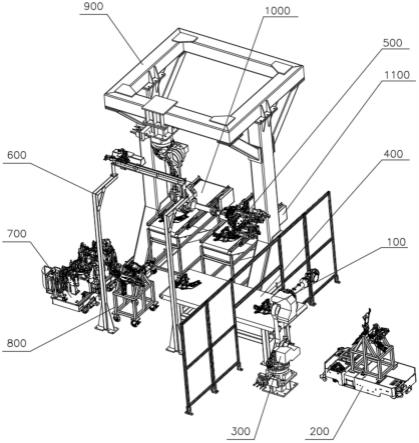
19.图1为本实用新型一种用于复杂零部件的3d视觉识别与测量智能装置的整体结构示意图;
20.图2为本实用新型中皮带输送线的结构示意图;
21.图3为本实用新型中抓手装置的结构示意图;
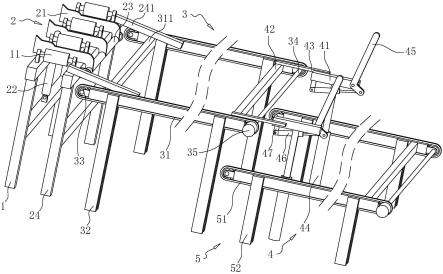
22.图4为本实用新型中3d视觉装置的整体结构示意图;
23.图5为本实用新型中3d视觉装置的上部结构示意图;以及,
24.图6为图4中a处的局部放大图。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.请参考图1-6,本实用新型提供的一种用于复杂零部件的3d视觉识别与测量智能装置,包括工件100、皮带输送线400和能够将工件100输送至皮带输送线400一端的agv送料装置200,在靠近agv送料装置200的皮带输送线400一端上设有送料机器人300,在皮带输送线400的另一端设有检测台800,在远离皮带输送线400的检测台800一侧设有焊接台700,以及,在靠近检测台800的皮带输送线400上方设有3d视觉装置600,在皮带输送线400的侧面设有搬运机器人900,该搬运机器人900上设有抓手装置500,在搬运机器人900的下端设有
合格输送线1000和返修输送线1100;agv送料装置200可以将工件100输送至皮带输送线400的一端,送料机器人300主要将所述agv送料装置200上的工件100搬运至皮带输送线400上,抓手装置500可以抓取皮带输送线400上的工件100,3d视觉装置600可以识别皮带输送线400的工件100姿态和测量检测台800上的工件100焊接质量,合格输送线1000和返修输送线1100主要可以实现合格工件与不合格工件的分开输送。
27.本实用新型中,皮带输送线400包括安装框架401,在安装框架401上沿该安装框架401的长度方向设有平皮带402,在靠近送料机器人300的平皮带402一端上设有电机405,该电机405的输出轴与主传动轴403连接在一起,在平皮带402的另一端设有从传动轴404,在靠近从传动轴404的安装框架401侧面装设有感应器支架406,感应器支架406上装设有能够感应皮带输送线400上工件100位置的第一感应器407;电机405可以带动主传动轴403旋转运动,平皮带402与主传动轴403、从动轴404之间产生摩擦,主传动轴403与从动轴404运动并带动平皮带402,从而实现平皮带402的直线运动,第一感应器407可以感应工件100在皮带输送线400上的位置,从而控制电机405是否停止。
28.本实用新型中,抓手装置500包括第一法兰501,在第一法兰501上装设有八角管502,第一法兰501和八角管502组合形成四方型框架结构,在八角管502的一侧装设有能够对抓手装置500实现气路控制的气路控制总成503,在八角管502上装设有角座504,角座504上装设有夹紧气缸505,在夹紧气缸505上装设有压块506,以及,在角座504上还装设有能够与压块506配合完成夹紧动作的托块507;八角管502构建出的四方型框架固定安装在第一法兰501上,气路控制总成503用于实现对所述抓手装置500的气路控制。
29.本实用新型中,在角座504上还装设有双导杆气缸508,双导杆气缸508的活动端装设有定位销509,在角座504上还装设有能够感应零部件的第二感应器510;定位销509安装在双导杆气缸508的活动端,从而可以通过双导杆气缸508的伸缩实现工件100的销孔定位,安装在八角管502上的第二感应器510用于感应工件100是否存在。
30.本实用新型中,3d视觉装置600包括装设在皮带输送线400一侧的立柱601,在立柱601上装设有安装支柱602,在安装支柱602的一侧设有第一安装底座603,在第一安装底座603内装设有第一丝杆604,在第一安装底座603的一端设有第一伺服606,第一伺服606通过一第一联轴器605与第一丝杆604连接在一起,在第一丝杆604的滑动端设有能够随该第一丝杆604进行左右滑动的第一滑动板608,在第一滑动板608上装设有第一感应片607,在安装支柱602的上方设有拖链底板612,在第一滑动板608上设有拖链安装板613,拖链底板612和拖链安装板613通过一拖链614连接在一起,其中,拖链614的一端设置在拖链底板612上,拖链614的另一端设置在拖链安装板613上;第一滑动板608可以在第一丝杆604上左右滑动,拖链底板612、拖链安装板613和拖链614可以用于3d视觉装置600线缆的布置。
31.本实用新型中,在第一安装底座603的一侧还设有第一感应安装座611,在第一感应安装座611上装设有能够感应第一感应片607位置的第三感应器609和第四感应器610;第三感应器609和第四感应器610可以感应第一感应片607的位置,从而确定第一滑动板608的左右位置。
32.本实用新型中,在第一滑动板608上还设有能够随该第一滑动板608运动的第二安装底座615,在第二安装底座615内设有第二丝杆616,在第二安装底座615的一端设有第二伺服618,第二伺服618通过一第二联轴器617与第二丝杆616连接在一起,在第二丝杆616的
滑动端设有能够随该第二丝杆616进行上下移动的第二滑动板620,第二滑动板620上设有视觉检测盒624和第二感应片619;第二滑动板620可以随第二丝杆616上下滑动,视觉检测盒624可以随第一滑动板608进行左右滑动,同时也可以随第二滑动板620进行上下滑动。
33.本实用新型中,在第二安装底座615的一侧还设有第二感应安装座623,在第二感应安装座623上设有能够感应第二感应片619位置的第五感应器621和第六感应器622;第五感应器621和第六感应器622可以感应第二感应片619的位置,从而确定第二滑动板620的上下位置。
34.本实用新型具体使用时,agv送料装置200将工件100运送至皮带输送线400的附近,然后送料机器人300将工件100抓取至皮带输送线400上,3d视觉装置600上的3d视觉检测盒624移动到最右端并识别和确定皮带输送线400上工件100的空间位置,然后将信号传输给搬运机器人900,搬运机器人900通过抓手装置500将工件100抓取至焊接台700进行工艺焊接,焊接完成后,搬运机器人900将工件100抓取至检测台800,此时3d视觉装置600上视觉检测盒624移动到检测台800的上方,对检测台800上的工件100进行测量,此时,若工件100的焊接质量合格,3d视觉装置600将工件100的空间位置传输给搬运机器人900,搬运机器人900将工件100抓取至合格输送线1000,合格输送线1000将工件100输送至下一个工艺工序中去,若工件100的焊接质量不合格,3d视觉装置600将工件100的空间位置传输给搬运机器人600,搬运机器人600将工件100抓取至返修输送线1100,返修输送线1100将工件100输送至初始工位进行返修。
35.以上对本实用新型的较佳实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,其中未尽详细描述的设备和结构应该理解为用本领域中的普通方式予以实施;任何熟悉本领域的技术人员,在不脱离本实用新型技术方案范围情况下,都可利用上述揭示的方法和技术内容对本实用新型技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例,这并不影响本实用新型的实质内容。因此,凡是未脱离本实用新型技术方案的内容,依据本实用新型的技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均仍属于本实用新型技术方案保护的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。