1.本发明涉及搅拌摩擦焊技术领域,尤其是指一种基于涡流量的双轴肩搅拌摩擦焊装置、系统及自动调节方法。
背景技术:
2.搅拌摩擦焊(fr ict ion st i r we l d i ng,fsw)是指利用高速旋转的焊具与工件摩擦产生的热量使被焊材料局部熔化,当焊具沿着焊接界面向前移动时,被塑性化的材料在焊具的转动摩擦力作用下由焊具的前部流向后部,并在焊具的挤压下形成致密的固相焊缝。搅拌摩擦焊接头成形美观、综合力学性能良好、焊接变形小、绿色环保、无熔焊存在的气孔、裂纹、夹渣等缺陷,适合铝合金、镁合金、铜合金等金属材料的焊接,因此fsw广泛应用于船舶、航空航天及轨道交通等领域。
3.但是常规的搅拌摩擦焊的方法及设备易出现焊接部位根部未焊透、弱结合等缺陷,且在焊接时搅拌摩擦焊接设备对工件的顶锻力较大,需要在工件背部进行刚性支撑,在针对如筒段环缝、纵缝等工况时需要制备对应的支撑固定工装,工装的装配时间长,降低了生产的效率,同时现有的搅拌摩擦焊接设备不能根据工件不同位置的实时尺寸或厚度的变化调整焊接压入量,导致搅拌摩擦焊的实际焊接效果与理论效果有差异,无法工程化应用。
技术实现要素:
4.为此,本发明所要解决的技术问题在于克服现有技术中的搅拌摩擦焊的方法及设备易出现焊接部位根部未焊透、弱结合等缺陷,且在焊接时搅拌摩擦焊接设备对工件的顶锻力较大,需要在工件背部进行刚性支撑,在针对如筒段环缝、纵缝等工况时需要制备对应的支撑固定工装,工装的装配时间长,降低了生产的效率,同时现有的搅拌摩擦焊接设备不能根据工件不同位置的实时尺寸或厚度的变化调整焊接压入量,导致搅拌摩擦焊的实际焊接效果与理论效果有差异,无法实现工程化应用的问题。
5.为解决上述技术问题,本发明提供了一种双轴肩搅拌摩擦焊装置,包括,
6.回抽式搅拌摩擦焊主轴头,其包括壳体、主轴以及位于主轴内部的回抽w轴;
7.双轴肩搅拌组件,所述双轴肩搅拌组件包括焊接刀柄和转接轴,所述焊接刀柄的一端与所述主轴的输出端同轴连接,另一端同轴设置有上轴肩,所述转接轴设置于所述焊接刀柄内部,且所述转接轴的一端与所述回抽w轴的输出端同轴连接,另一端同轴连接有搅拌针,所述搅拌针的输出端延伸至焊接刀柄外并同轴连接有下轴肩;
8.检测组件,所述检测组件包括涡流探头,所述涡流探头连接在壳体上;
9.根据所述涡流探头实时检测被焊接工件的尺寸厚度变化,通过所述主轴和所述回抽w轴带动所述上轴肩和所述下轴肩在z轴方向上运动,经过实时调整使焊接过程中所述上轴肩和所述下轴肩相对于其焊接面的距离保持不变。
10.在本发明的一个实施例中,所述检测组件包括支架,所述支架的一端与所述壳体相连,所述支架的另一端延伸至所述上轴肩的一侧,且所述支架靠近所述上轴肩的一端设
置有安装板,所述涡流探头设置于所述安装板上。
11.在本发明的一个实施例中,所述焊接刀柄靠近所述主轴一端的侧面上设置有环形边沿,所述环形边沿上开设有多个螺栓孔并通过螺栓与所述主轴同轴连接。
12.在本发明的一个实施例中,所述下轴肩上开设有螺纹孔,所述下轴肩通过所述螺纹孔同轴连接于所述搅拌针的输出端。
13.在本发明的一个实施例中,所述焊接刀柄为管状结构,其包括内部的中心通孔,所述转接轴同轴设置于所述中心通孔中,且绕所述转接轴靠近所述回抽w轴一端的周向设置有环形边缘,所述环形边缘上对称设置有多个连接孔,所述转接轴通过螺栓在所述连接孔处与所述回抽w轴同轴连接。。
14.在本发明的一个实施例中,所述回抽w轴与所述主轴同步高速运转的同时可沿z轴独立运动,且其独立运动的范围为0mm-20mm。
15.一种双轴肩搅拌摩擦焊系统,包括数控系统以及上述任意一项所述的双轴肩搅拌摩擦焊装置,且所述数控系统与所述双轴肩搅拌摩擦焊装置的涡流探头相连。
16.一种基于涡流测量的双轴肩搅拌摩擦焊自动调节方法,利用如上述任意一项所述的双轴肩搅拌摩擦焊装置对搅拌摩擦焊过程进行自动调节,包括以下步骤,
17.步骤s1:测量待焊接工件的焊接起始位置的厚度e,根据厚度e调整所述上轴肩和所述下轴肩之间的间距d,使间距d小于所述厚度e;
18.步骤s2:对待焊接工件进行装夹和固定;
19.步骤s3:移动摩擦焊主轴头使搅拌针位于工件的边缘,且使所述上轴肩至待焊接件上表面的距离与所述下轴肩至待焊接件下表面的距离相同;
20.步骤s4:按照预设的焊接参数进行焊接,焊接过程中涡流探头实时测量其与工件上表面之间的距离a以及与工件下表面之间的距离b,根据数据对所述上轴肩和所述下轴肩的高度进行实时调整,使焊接过程中所述上轴肩和所述下轴肩相对于其焊接面的距离保持不变,直至焊接完成。。
21.在本发明的一个实施例中,焊接过程中所述涡流探头实时测量其与工件上表面之间的距离a以及与工件下表面之间的距离b,并将数据反馈到主轴头的数控系统内,通过存储与运算输出实时前后落差
△
a=a
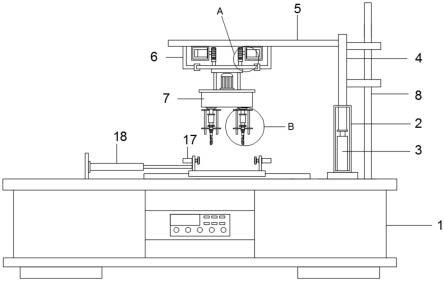
n-a
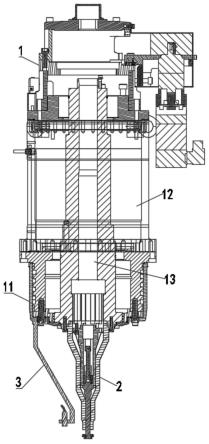
n-1
与实时厚度cn=b
n-an的前后落差
△
c=c
n-c
n-1
,并将
△
a和
△
c的数值分别叠加在带动主轴和回抽w轴运动的驱动结构上,驱动结构根据数值对上轴肩和下轴肩的高度进行实时调整,直至焊接完成。
22.在本发明的一个实施例中,焊接过程中所述上轴肩与所述涡流探头的相对位置保持不变。
23.本发明的上述技术方案相比现有技术具有以下优点:
24.本发明所述的一种双轴肩搅拌摩擦焊装置、系统及自动调节方法,搅拌摩擦焊装置通过主轴和回抽w轴能够分别对上轴肩和下轴肩的高度进行调整,配合涡流探头,能够随着待焊接工件的尺寸和厚度的变化进行实时的自动调整,能够适用于平面度、轮廓度和厚度均匀性差的工况,通用性高;且涡流探头具有较高的灵敏度,其涡流线圈不需要与工件接触,也无需耦合剂,能够在高温环境下工作,能够实现高速、高效率的自动化测量,保证调整的实时性;整个装置的结构及控制方法简单,不仅解决了常规搅拌摩擦焊装置对被焊接件根部无法焊透的问题,且无需复杂的工装,节省安装和调整的时间,能够提高焊接的效率;
同时还解决了常规搅拌摩擦焊装置适应性差,不能工程化应用的问题,具有适应性广、焊接质量可靠、生产效率高、生产成本低等诸多优点,适合工程化推广应用。
附图说明
25.为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明,其中
26.图1是本发明优选实施例的双轴肩搅拌摩擦焊装置的整体结构示意图;
27.图2是本发明优选实施例的双轴肩搅拌摩擦焊装置的双轴肩搅拌组件的结构示意图;
28.图3是本发明优选实施例的双轴肩搅拌摩擦焊装置的焊接过程尺寸关系的示意图;
29.图4是图3所示的双轴肩搅拌摩擦焊装置的a部分的放大图;
30.图5是本发明优选实施例的双轴肩搅拌摩擦焊装置的工作原理的示意图。
31.说明书附图标记说明:1、回抽式搅拌摩擦焊主轴头;11、壳体;12、主轴;13、回抽w轴;2、双轴肩搅拌组件;21、焊接刀柄;22、转接轴;23、上轴肩;24、搅拌针;25、下轴肩;3、检测组件;31、涡流探头;32、支架;a、涡流探头与工件上表面之间的距离;b、涡流探头与工件下表面之间的距离。
具体实施方式
32.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
33.实施例一
34.参照图1、图2和图3所示,本发明的一种双轴肩搅拌摩擦焊装置,包括,
35.回抽式搅拌摩擦焊主轴头1,其包括壳体11、主轴12以及位于主轴12内部的回抽w轴13;
36.双轴肩搅拌组件2,双轴肩搅拌组件2包括焊接刀柄21和转接轴22,焊接刀柄21的一端与主轴12的输出端同轴连接,另一端同轴设置有上轴肩23,转接轴22设置于焊接刀柄21内部,且转接轴22的一端与回抽w轴13的输出端同轴连接,另一端同轴连接有搅拌针24,搅拌针24的输出端延伸至焊接刀柄21外并同轴连接有下轴肩25;
37.检测组件3,检测组件3包括涡流探头31,涡流探头31连接在壳体11上;
38.根据涡流探头31实时检测被焊接工件的尺寸厚度变化,通过主轴12和回抽w轴13带动上轴肩23和下轴肩25在z轴方向上运动,经过实时调整使焊接过程中上轴肩23和下轴肩25相对于其焊接面的距离保持不变。
39.具体的,回抽w轴13设置于主轴12的内部,回抽w轴13能够随主轴12移动,且回抽w轴13能够与主轴12同步高速旋转,同时回抽w轴13还能够独立于主轴12在z轴方向上自主运动;焊接刀柄21为管状结构,焊接刀柄21的一端同轴连接在主轴12的输出端上,另一端同轴设置有上轴肩23,转接轴22位于焊接刀柄21中,转接轴22的一端与回抽w轴13的输出端同轴连接,另一端同轴连接有搅拌针24,搅拌针24延伸至焊接刀柄21外并同轴连接有下轴肩25;可以想到的是,通过控制主轴12和回抽w轴13能够对上轴肩23和下轴肩25位置进行调整,以
调整上轴肩23相对于被焊接工件上表面的距离以及下轴肩25相对于被焊接工件下表面的距离。上述z轴方向为机械坐标系中的z轴方向,即主轴的长度方向。
40.具体的,涡流探头31用于测量其距离待焊接工件上表面和下表面的高度距离,以此实时监测待焊接工件厚度尺寸的变化,并实时反馈至回抽式搅拌摩擦焊主轴头1的数控系统内,通过存储和运算分别对主轴12和回抽w轴13的高度进行实时调整,保证上轴肩23与待焊接工件的上表面以及下轴肩25与待焊接工件的下表面之间的距离不变,以此确保焊接的一致性。
41.本实用新型的双轴肩搅拌摩擦焊装置,采用带有上轴肩23和下轴肩25的自支撑搅拌工具,两个轴肩通过与被焊接材料厚度相当的搅拌针24连接,焊接过程中上轴肩23以及下轴肩25与搅拌针24共同旋转并与被焊接材料相互作用实现焊接。上轴肩23和下轴肩25位于被焊接工件的两侧,使得搅拌摩擦焊接过程中的顶锻压力较小,提高了诸如曲线、狭小空腔及筒体等复杂结构件搅拌摩擦焊接的可操作性,同时无需背部刚性支撑垫板,节省工装成本,减少装配时间。此外,双轴肩搅拌摩擦焊装置对工件上表面和下表面同时进行焊接,从根本上消除了被焊接件根部未焊透、弱结合等缺陷。且通过涡流探头31对工件的实时尺寸或厚度变化进行测量,无需接触工件,也不需要耦合剂就能实现高度、高效率的自动化测量。
42.进一步的,检测组件3包括支架32,支架32的一端与壳体11相连,支架32的另一端延伸至上轴肩23的一侧,且支架32靠近上轴肩23的一端设置有安装板,涡流探头31设置于安装板上。具体的,涡流探头31通过支架32连接在壳体11上,涡流探头31位于上轴肩23的一侧,涡流探头31位于上轴肩23/下轴肩25的运动轨迹上,且在涡流探头31的运动过程中,涡流探头31始终位于上轴肩23/下轴肩25的前方;可以想到的是,通过涡流探头31实时监测焊接路线上待焊接件的厚度变化,使上轴肩23和下轴肩25分别通过主轴12和回抽w轴13进行高度的调整,保证焊接的一致性,使得本实用新型的双轴肩搅拌摩擦焊装置能够适用平面度、轮廓度或厚度均匀性较差的工况,具有较好的通用性。
43.进一步的,焊接刀柄21靠近主轴12一端的侧面上设置有环形边沿,环形边沿上开设有多个螺栓孔并通过螺栓与主轴12同轴连接。
44.进一步的,下轴肩25上开设有螺纹孔,下轴肩25通过螺纹孔同轴连接于搅拌针24的输出端。
45.进一步的,焊接刀柄21为管状结构,其包括内部的中心通孔,转接轴22同轴设置于中心通孔中,且绕转接轴22靠近回抽w轴13一端的周向设置有环形边缘,环形边缘上对称设置有多个连接孔,转接轴22通过螺栓在连接孔处与回抽w轴13同轴连接
46.进一步的,回抽w轴13与主轴12同步高速运转的同时可沿z轴独立运动,且其独立运动的范围为0mm-20mm。
47.实施例二
48.在实施例一的基础上,一种双轴肩搅拌摩擦焊系统,包括数控系统以及上述任意一项的双轴肩搅拌摩擦焊装置,且数控系统与双轴肩搅拌摩擦焊装置的涡流探头相连。具体的,数控系统连接双轴肩搅拌摩擦焊装置,数控系统对搅拌摩擦焊装置的各运动单元进行控制,同时数控系统连接涡流探头,根据涡流探头提供的工件尺寸厚度的实时变化数据,数控系统对搅拌摩擦焊装置进行控制,使主轴12和回抽w轴13分别带动上轴肩23和下轴肩
25运动。
49.实施例三
50.在实施例一的基础上,参照图3-图5所示,一种基于涡流测量的双轴肩搅拌摩擦焊自动调节方法,基于如上述任意一项的双轴肩搅拌摩擦焊装置,包括以下步骤,
51.步骤s1:测量待焊接工件的焊接起始位置的厚度e,根据厚度e调整上轴肩23和下轴肩25之间的间距d,使间距d小于厚度e;
52.步骤s2:对待焊接工件进行装夹和固定;
53.步骤s3:移动摩擦焊主轴头使搅拌针24位于工件的边缘,且使上轴肩23至待焊接件上表面的距离与下轴肩25至待焊接件下表面的距离相同;
54.步骤s4:按照预设的焊接参数进行焊接,焊接过程中涡流探头31实时测量其与工件上表面之间的距离a以及与工件下表面之间的距离b,根据数据对上轴肩23和下轴肩25的高度进行实时调整,使焊接过程中上轴肩23和下轴肩25相对于其焊接面的距离保持不变,直至焊接完成.
55.进一步的,焊接过程中涡流探头31实时测量其与工件上表面之间的距离a(即涡流探头与工件上表面之间的距离a)以及与工件下表面之间的距离b(即涡流探头与工件下表面之间的距离b),并将数据反馈到主轴头的数控系统内,通过存储与运算输出实时前后落差
△
a=a
n-a
n-1
与实时厚度cn=b
n-an的前后落差
△
c=c
n-c
n-1
,并将
△
a和
△
c的数值分别叠加在带动主轴12和回抽w轴13运动的驱动结构的驱动器内,驱动结构根据数值对主轴12和回抽w轴13的高度位置进行实时调整,从而实现主轴12和回抽w轴13对上轴肩23和下轴肩25高度的实时调整,直至焊接完成。
56.具体的,当
△
a为正值时,主轴12带动上轴肩23升高对应的高度,当
△
a为负值时,主轴12带动上轴肩23下降对应的高度,保证上轴肩23相对于被焊接件上表面的实时焊接面的距离保持不变;同理,当
△
c值为正值时,回抽w轴13带动下轴肩25降低对应的高度,当
△
c值为负值时,回抽w轴13带动下轴肩25升高对应的高度,保证下轴肩25与待焊接工件的下表面之间的距离不变,保证焊接的一致性。(需要注意的是,当主轴12带动上轴肩23运动时,回抽w轴13随主轴12运动相同的距离,同时回抽w轴13根据
△
c的值带动下轴肩25运动对应的高度距离)。
57.进一步的,焊接过程中上轴肩23与涡流探头31的相对位置保持不变,涡流探头31与上轴肩23的水平距离为10mmm-100mm。
58.显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。