1.本技术涉及道面板安装技术领域,特别是一种道面板平整度调整装置及其高程联合调整装置。
背景技术:
2.混凝土预制道面板采用工厂化提前预制,生产环境稳定,质量可靠,耐久性好。施工全过程机械化、智能化水平高,各工序分别组织进行平行流水作业,效率高,建设周期短。目前混凝土预制道面板已广泛用于机场道面和公路路面抢修、装配式道面或路面建设中。
3.国内外现有技术工艺在混凝土预制道面板的制作上已经很成熟,但是道面板安装过程无法实现高效准确。在混凝土预制道面板的安装过程中,预制道面板平整度的调整是至关重要的工序,平整度调整的准确性和实效性,是影响整体施工进度的重要因素。
4.目前,对于预制道面板平整度的调整主要通过人工预先测量出预制板各角点的高程,然后通过人工敲击或移动的方式不断调整和校准各角点的高度,使各角点的高程达到预设标准值,从而完成对预制道面板平整度的调整。但这种方式耗时、耗力,且调整操作对人工依赖度高、调整难度大、调整精度低,这使得预制道面板调整高度工序的工期耗时长且所得结果无法保证统一,进而影响项目整体工期,导致工期进度无法按计划完成。
技术实现要素:
5.本技术提供了一种道面板平整度调整装置及其高程联合调整装置,用于解决现有技术中存在的预制道面板平整度完全依靠人工调整,对人工经验、责任心依赖度高,调整过程耗时、耗力,且调整难度大、调整精度低,调整结果不统一的技术问题。
6.本技术提供了一种道面板平整度调整装置,包括:无线控制器、减速器电机、控制终端、固定座、扭杆、压簧、调整螺栓;控制终端与自动跟踪全站仪电连接;控制终端与无线控制器电连接;无线控制器与减速器电机控制连接;
7.减速器电机安装于固定座顶面上;减速器电机的驱动轴伸出固定座顶面并与设置于固定座外的扭杆驱动连接;扭杆套设于调整螺栓顶面上,与调整螺栓驱动连接;
8.压簧套设于扭杆上,并夹设于固定座底面与待调整道面板之间。
9.优选地,包括:第一机架和电机罩;减速器电机容纳设置于电机罩内;电机罩底面设有敞口,并与第一机架顶面相连接;减速器电机的驱动端伸出第一机架外设置。
10.优选地,包括:内置接收控制器,内置接收控制器与减速器电机控制连接,并设置于减速器电机顶面上;无线控制器与内置接收控制器电连接。
11.优选地,包括:第二机架,无线控制器设置于第二机架上。
12.优选地,包括:无线接收天线、电池;无线接收天线、电池设置于第二机架上;无线接收天线与无线控制器电连接;便于无线控制器接受控制终端发出的控制信号;电池与减速器电机供电连接。
13.优选地,第二机架设置于第一机架外侧,并与第一机架侧壁相连接。
14.优选地,包括:旋转轴套;旋转轴套套设于减速器电机输出轴上,扭杆通过旋转轴套与减速器电机驱动连接。
15.本技术的另一方面还提供了一种高程联合调整装置,包括:多个如上述的道面板平整度调整装置;待调整道面板角点处分别设置道面板平整度调整装置,同一待调整道面板角点处道面板平整度调整装置通过对称设置于道面板平整度调整装置两侧的杆体连接。
16.本技术能产生的有益效果包括:
17.1)本技术所提供的道面板平整度调整装置,该装置通过电机传动转动调整螺栓,调整角点的高程能够快速、精准实现预制道面板角点高程的调整,有效解决预制道面板安装过程中的瓶颈制约因素,解决人工调整预制道面板平整度过程中的调整难度大、精度低、耗时长、不确定性高等问题。采用该装置无需人工调整,可高效、准确完成调整,调整结果统一。
附图说明
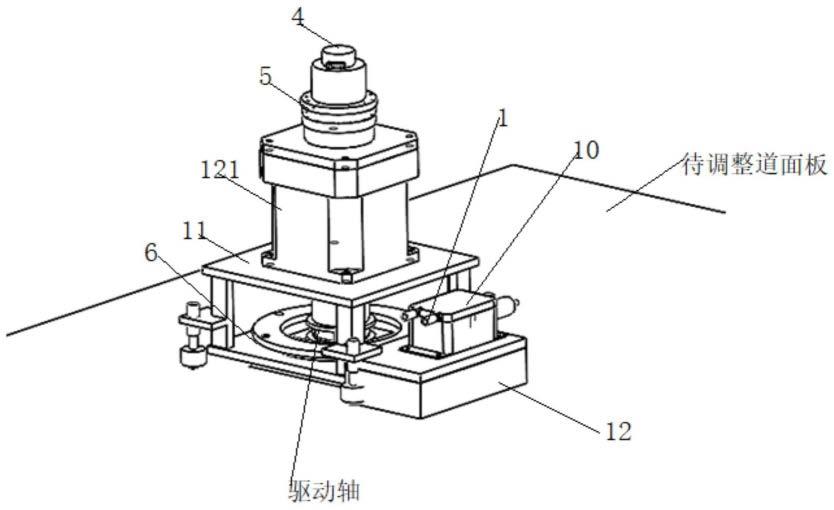
18.图1为本技术提供的道面板平整度调整装置中所用调整装置立体结构示意图;
19.图2为本技术提供的调整装置主视剖视结构示意图;
20.图3为本技术提供的道面板平整度自动调整装置模块连接结构示意图;
21.图4为本技术提供的扭杆主视剖视结构示意图;
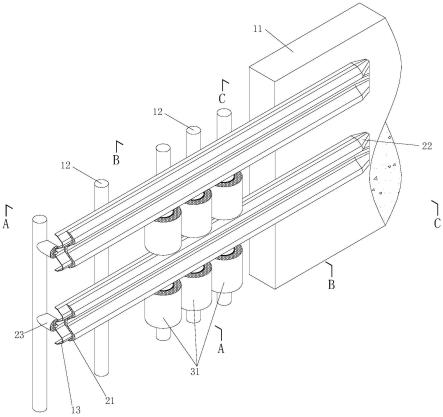
22.图5为本技术提供的调整装置设置于预制道面板上的立体结构示意图;
23.图6为本技术提供的高程联合调整装置连接状态俯视结构示意图;
24.图7为图5中a点局部放大透视示意图;
25.图例说明:
26.1、无线接收天线;2、电机罩;3、电池;4、内置接收控制器;5、减速器电机;6、固定座;7、旋转轴套;8、压簧;9、扭杆;10、无线控制器;11、第一机架;12、第二机架;121、机壳。
具体实施方式
27.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。通常在此处附图中描述和示出的本实用新型实施方式的组件可以以各种不同的配置来布置和设计。
28.因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
29.本实施方案中所用控制器为现有结构,且控制电路通过本领域的技术人员简单的编程即可实现,属于本领域的公知常识,仅对其进行使用,不进行改造,故不再详细描述控制方式和电路连接。
30.本技术中未详述的且并不用于解决本技术技术问题的技术手段,均按本领域公知常识进行设置,且多种公知常识设置方式均可实现。
31.参见图1~7,本技术提供的道面板平整度调整装置,包括:无线控制器10、减速器
电机5、控制终端、固定座6、扭杆9、压簧8、调整螺栓115;控制终端与自动跟踪全站仪电连接;控制终端与无线控制器10电连接;无线控制器10与减速器电机5控制连接;
32.减速器电机5安装于固定座6顶面上;减速器电机5的驱动轴伸出固定座6顶面并与设置于固定座6外的扭杆9驱动连接;扭杆9套设于调整螺栓115顶面上;
33.压簧8套设于扭杆9上,并夹设于固定座6底面与待调整道面板之间,起到减震的作用。
34.按此设置,通过扭杆9转动螺栓实现对设置螺栓的道面板角点实现上、下移位,并结合自动跟踪全站仪、无线控制器10、减速器电机5、控制终端,根据实测实时高程与设计高程的差值,控制道面板各角点精确进行上、下移动,无需人工参与,调整精度便于统一,调整效率高,从而实现对所有道面板角点高程的准确调整。
35.优选地,包括:第一机架11和电机罩2;减速器电机5容纳设置于电机罩2内;电机罩2底面设有敞口,并与第一机架11顶面相连接;减速器电机5的驱动端伸出第一机架11外设置。按此设置能提高使用过程中减速器电机5的转动平稳性。
36.优选地,包括:内置接收控制器4,内置接收控制器4与减速器电机5控制连接,并设置于减速器电机5顶面上;无线控制器10与内置接收控制器4电连接。按此设置能实现对电机的可靠控制。
37.优选地,包括:第二机架12,无线控制器10设置于第二机架12上。
38.优选地,包括:无线接收天线1、电池3;无线接收天线1、电池3设置于第二机架12上;无线接收天线1与无线控制器10电连接;便于无线控制器10接受控制终端发出的控制信号;电池3与减速器电机5供电连接。通过线路连接实现对电机的可靠供电。
39.优选地,第二机架12设置于第一机架11外侧,并与第一机架11侧壁相连接。按此设置便于整体搬运该调整装置。
40.优选地,包括:旋转轴套7;旋转轴套7套设于减速器电机5输出轴上,扭杆9通过旋转轴套7与减速器电机5驱动连接。按此设置能提高转动调整时,转动扭矩输出平稳。
41.优选地,自动跟踪全站仪的测量区域范围为测量点周围500m范围内区域。
42.在一具体实施例中,设计高程为完成调整后道面板调整螺栓115顶面所需满足的高程。
43.本技术中所用减速器电机为电机与减速器驱动连接。本技术中调整螺栓115为预埋件,预埋设用于调整角点高程置于预制道面板待调整的角点上用于通过转动实现对角点高程的调节,具体结构与现有道面板高程调整常用预埋件结构相同,在此不累述。
44.本技术的另一方面还提供了一种高程联合调整装置,包括:多个如上述的道面板平整度调整装置;待调整道面板角点处分别设置道面板平整度调整装置,同一待调整道面板角点处道面板平整度调整装置通过对称设置于道面板平整度调整装置两侧的杆体116连接。
45.通过杆体116连接能抵消减速器电机驱动调整螺栓115时产生的反力矩,提高高程调整平稳性。
46.实施例
47.所用调整装置包含:无线接收天线1、电机罩2、电池3、内置接收控制器4、减速器电机5、固定座6、旋转轴套7、压簧8、扭杆9、无线控制器10、无线接收天线1和电池3独立安装在
第二机架12上。
48.无线控制器10通过无线连接实现与主控制app的通信,电池3与减速器电机5供电连接,无线控制器10与减速器电机5控制连接;无线控制器10将操作指令和电能通过线缆输送给减速器电机5,减速器电机5和电机罩2固定在底部的固定座6上,固定座6内设置有旋转轴套7,减速器电机5与旋转轴套7驱动连接,减速器电机5通过旋转轴套7与下部的扭杆9联结,扭杆9和旋转轴套7之间设置有压簧8。
49.该装置的使用过程包括如下步骤:
50.步骤1:设置绝对高程参考点,在需调平预制道面板500米范围内架设自动跟踪全站仪,并在需调平预制道面板四个角点处的调整螺栓115位置架设全站仪监测用菱镜;
51.步骤2:将4个具有上述结构的道面板平整度调整装置的扭杆9底端插入预制道面板的调整螺栓115内,用固定座6将道面板平整度调整装置固定在预制道面板上,安装后使得压簧8在预制道面板顶面与固定座6之间处于压缩状态;
52.步骤3:通过pad设置自动跟踪全站仪,操作人员通过自动跟踪全站仪测得待调平道面板的调整螺栓115各角点处的实时高程,并采用无线信号将该实时高程信息发给控制终端;
53.步骤4:将预制道面板调整螺栓115所在位置的设计高程信息输入到控制终端;
54.步骤5:控制终端根据设计高程信息和实时高程信息计算出每个调整螺栓115的调整行程,并采用无线信号发给道面板平整度调整装置;
55.步骤6:道面板平整度调整装置通过无线接收天线1接收信号,并将该信号传给无线控制器10;
56.步骤7:内置接收控制器4控制减速器电机5工作,减速器电机5输出轴转动并带动扭杆9在调整螺栓115孔内转动,扭杆9带动调整螺栓115转动,实现各调整螺栓115处角点上下移动;
57.步骤8:自动跟踪全站仪实时测量调整螺栓115角点高程,并与设计高程信息对比,当实时高程与设计高程的差值满足误差要求时,就通过无线控制器10,控制减速器电机5停止工作,完成对道面板各角点高程的调整。
58.按上述操作步骤使用该装置,能利用扭杆9在转动带动角点处的调整螺栓115转动,实现对角点处高程的调节。通过设置全站仪对道面板各角点高程进行实时测量,并在控制终端中获取设计高程与实时高程的差值,根据差值控制减速器电机5带动扭杆9转动,完成对监测角点处高程的调整,该调节过程中,人工仅需输入设计高程,调整过程及调整后高程可实时测量,调整效率高,调整后高程结果统一,误差小,不受人为因素干扰,操作简便。
59.本技术中所用无线控制器及内置控制接收器为东莞市钜一电机有限公司生产的直流电机调速器dc90-110-180-200v;无线接收天线为任丘市白洋淀通讯天线器生产的byd-ssdxp型吸盘天线。
60.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。