技术特征:
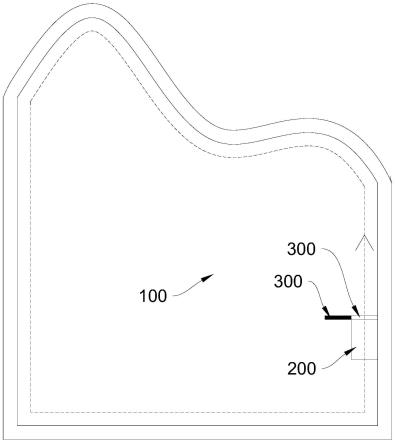
1.一种无人驾驶自动规划环保清扫方法,其特征在于,包括:将清扫车放入清扫区域并使清扫车在清扫区域中贴边;清扫车画指示线,所述指示线垂直于清扫车所在地点的清扫区域的边线,且所述指示线由所述清扫区域的边线朝清扫区域内部画出;将所述指示线作为清扫车的定位基准,清扫车沿清扫区域的边界行进一周并回到指示线所指示的起点位置;根据沿边界行进一周的过程中清扫车的位移情况构建清扫区域的二维结构图,并在所述二维结构图中标示所述指示线;从指示线所定位的起点出发,沿清扫区域的边线清扫一周并回到起点;清扫车沿指示线的长度方向朝清扫区域的内部移动,根据移动量和二维结构图生成第二圈次的清扫路径图,按清扫路径图完成第二圈的清扫工作;清扫车依次沿指示线的长度方向朝清扫区域的内部移动,并根据移动量和二维结构图生成其他圈次的清扫路径图,并按清扫路径图完成其他圈次的清扫工作,直至将整个清扫区域清理完毕;清除指示线。2.根据权利要求1所述的无人驾驶自动规划环保清扫方法,其特征在于,在每一圈次开始之前均画出本圈次的指示线,在清扫一圈并回到本圈次的指示线处时,核对清扫车的实际行进路径与生成的清扫路径图是否一致。3.根据权利要求2所述的无人驾驶自动规划环保清扫方法,其特征在于,指示线包括第一颜色线条和第二颜色线条,相邻圈次之间的指示线采用不同颜色的指示线。4.根据权利要求3所述的无人驾驶自动规划环保清扫方法,其特征在于,不同圈次的指示线位于同一直线并依次相连。5.根据权利要求4所述的无人驾驶自动规划环保清扫方法,其特征在于,进入下一圈次时,清扫车沿指示线的移动距离等于下一圈次的指示线的长度,指示线的长度略小于清扫车的清理宽度。6.根据权利要求5所述的无人驾驶自动规划环保清扫方法,其特征在于,所述无人驾驶自动规划环保清扫方法还包括:将整个清扫区域清扫完毕后,清扫车回到最后一个圈次的指示线处时,沿各个圈次的指示线的方向移动至清扫区域的边界,验证各个圈次的指示线是否依次相连且位于同一直线;若是,则清理完毕。7.根据权利要求6所述的无人驾驶自动规划环保清扫方法,其特征在于,所述无人驾驶自动规划环保清扫方法还包括:验证各个圈次的指示线是否依次相连且位于同一直线的结果若为否,则判断指示线是否依次相连;若是,则根据不同指示线之间的夹角在二维结构图中计算出遗漏区域,并对遗漏区域进行清理;若否,则根据不同指示线之间的距离和夹角在二维结构图中计算出遗漏区域,并对遗漏区域进行清理,同时提示设备故障。8.根据权利要求7所述的无人驾驶自动规划环保清扫方法,其特征在于,指示线采用需
要特殊清洗剂清洗的材料画出,该特殊清洗剂不同于用于清理清扫区域的清洗剂。9.根据权利要求7所述的无人驾驶自动规划环保清扫方法,其特征在于,识别指示线包括在清扫车底部设置视觉模块。10.根据权利要求7所述的无人驾驶自动规划环保清扫方法,其特征在于,回到指示线所指示的位置包括清扫车在长度方向和宽度方向上均回到指示线所指示的位置。
技术总结
本发明涉及环保技术领域,具体涉及一种无人驾驶自动规划环保清扫方法,包括:将清扫车贴边;画指示线;清扫车沿清扫区域的边界行进一周并回到指示线所指示的起点位置;根据沿边界行进一周的过程中清扫车的位移情况构建清扫区域的二维结构图;清扫车沿指示线的长度方向朝清扫区域的内部移动,根据移动量和二维结构图生成第二圈次的清扫路径图;清扫车依次沿指示线的长度方向朝清扫区域的内部移动,并根据移动量和二维结构图生成其他圈次的清扫路径图,并按清扫路径图完成其他圈次的清扫工作,直至将整个清扫区域清理完毕;清除指示线。其能够实现对更大面积的区域的快速清扫,出现清扫遗漏的概率明显降低,场地适应能力大大提高。高。高。
技术研发人员:肖富辉 张丽子 董世春
受保护的技术使用者:江西蓝天路之友环卫设备科技有限公司
技术研发日:2022.10.26
技术公布日:2023/2/6
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。