1.本发明涉及钻井时对井眼(wellbore)几何形状进行声学采形(acoustically profiling)。
背景技术:
2.烃开采井眼延伸至地下,并与圈闭烃的地下地层相交。井眼通常由钻井系统形成,该钻井系统包括由相互连接的管段组成的钻柱和安装在相互连接的管的一端的钻头。钻柱通常由设置在井眼开口上方的顶部驱动装置或转盘旋转。当钻头旋转时,钻头上的切削元件刮擦井眼的底部,并挖掘材料,从而使井眼加深。钻井液通常沿钻柱向下泵送,并从钻头导入井眼;然后,钻井液在钻柱和井眼的壁之间的环空中向上回流。钻屑是在挖掘时产生的,并随着循环钻井液被带上井眼。向上流动的钻井液中夹带的固体颗粒包括已经存在于钻井液中的钻屑和颗粒;诸如用于调节钻井液性能的添加剂。
3.沿井眼向上流动的钻井液的压力通常超过邻近地层中的压力。由于井眼中的压力较大,钻井液渗透到周围地层中一段距离,随着钻井液中的固体颗粒沿着井眼壁沉积,周围地层使井眼布满泥饼。泥饼限制了井眼和地层之间的流体连通。流体通过泥饼渗漏到某一点通常不会有问题,但是偶尔会沿着穿过泥饼的井眼壁出现裂缝、裂隙或冲刷,从而在井眼的壁中形成开口。有时,裂隙是由钻头穿过的岩层中的空隙造成的,或者是由地层和井眼之间的大的压差造成的。有时,这些开口允许流体在井眼和邻近的地层之间自由流动(漏失),并形成漏失区。当漏失的程度足以危及井控时,通常会采取纠正措施。
4.通常采用的纠正措施的类型包括调节钻井操作、改变钻井液的性质、向井下泵送堵漏材料(lcm)、用水泥堵塞井眼或在井下部署衬管以堵塞开口。在进行每一项补救工作时,关于漏失区的深度的信息是有用的。由于流体静压头随着井眼的深度而变化,所以漏失区所处的深度有时决定了钻井液密度和泵送到井下的漏失材料的压力。堵塞井眼或部署衬管通常需要以一定的精度确定漏失区深度,否则会增加在不正确深度处进行堵塞井眼或部署衬管的可能性。
技术实现要素:
5.本文公开了一种钻井时对井眼进行声学采形的示例方法,该方法包括:监测井眼中的穿越声学信号(traversing acoustic signal),该穿越声学信号在设置于井眼中的钻柱内传播,从钻柱的下端离开,从井眼的底部反射到钻柱外部的环空中,并在环空中沿远离井眼的底部的方向传播。该示例方法还包括:随着井眼被钻得更深,获得当井眼的底部处于不同深度时,获得穿越声学信号的速度;监测在环空内传播并从井眼的底部反射的环空声学信号;监测在钻柱内传播并从井眼的底部反射的钻柱声学信号;以及基于所监测的声学信号中的一个或多个来识别井眼中具有不连续表面(discontinuity of surface)的侧壁的深度。在一个替代性方案中,穿越声学信号由设置在地面上且在井眼外部的声学发射器产生,并由设置在地面上且在井眼外部的声学接收器记录,其中监测穿越声学信号的步骤
包括记录每个穿越声学信号产生和记录的时间,并且其中获得穿越声学信号的速度的步骤包括获得每个穿越声学信号产生和记录的时间差以定义每个穿越声学信号的传播时间,以及用每个传播时间除相应穿越声学信号传播的距离。在该替代性方案中,在以下深度处识别出不连续表面:该深度处相应穿越声学信号的速度小于在与该深度邻近的较低深度和较高深度获得的穿越声学信号的速度。在一个替代性方案中,环空声学信号由环空声学换能器产生和记录,其中钻柱声学信号由钻柱声学换能器产生和记录,并且其中环空声学换能器和钻柱声学换能器设置在地面上且在井眼的外部。在该示例中,井眼中具有不连续表面的侧壁的深度是通过在井眼的底部位于同一深度时记录的环空声学信号和钻柱声学信号之间的信号强度的偏差来识别的。不连续表面的示例包括完整性受损的位置,并且包括冲蚀区、裂缝区(fissure)和高度破裂区。该方法还可选地包括响应于不连续表面的识别而对井眼进行补救。在该示例中,对井眼进行补救的步骤包括对井眼进行井控维持(maintaining control),所述井控维持选自由如下组成的组:调节井眼压力、调节引入井眼的钻井液的密度、向所述井眼添加堵漏材料、在所述井眼中注入水泥(cementing)和在所述井眼中部署衬管。
6.公开了另一种钻井时对井眼进行声学采形的方法,该方法包括:监测钻井系统的操作,该钻井系统具有用于钻探井眼的钻柱;在钻柱内部产生穿越声学信号,该穿越声学信号在钻柱中向下传播并从钻柱的下端离开,从井眼的底部反射到钻柱周围的环空中,并在环空中向上传播。该示例的方法还包括基于穿越声学信号从井眼的底部反射之前和之后的传播时间,获得每个穿越声学信号的速度;以及当每个穿越声学信号在井眼内传播时,基于穿越声学信号的速度和井眼的底部的相应深度来识别井眼中的不连续表面。可选地,在以下深度处识别出井眼中的不连续表面:该深度处穿越声学信号的速度小于在与该深度邻近的较高或较低深度处穿越声波信号的速度。穿越声学信号可以由设置在井眼的外部的钻柱声学换能器产生,并且其中穿越声学信号可以由环空声学换能器记录并在从井眼的底部反射后记录。识别井眼中不连续表面的步骤还可选地包括:监测在环空中朝向井眼的底部轴向传播的环空声学信号,以及从井眼的底部反射以在环空中朝向井眼的开口传播的环空声学信号;监测在钻柱内向井眼的底部轴朝向传播的钻柱声学信号,以及从井眼的底部反射以在钻柱内朝向井眼的开口传播的钻柱声学信号;记录环空声学信号和钻柱声学信号的信号强度,并且其中在观察到环空声学信号和钻柱声学信号的记录信号强度之间的偏差的深度处识别出不连续表面。可选地,钻柱声学换能器产生穿越声学信号和钻柱声学信号,并记录从井眼的底部反射的钻柱声学信号。作为替代,环空声学换能器产生环空声学信号,并记录从井眼的底部反射的穿越声学信号以及从井眼的底部反射的环空声学信号。
7.本文公开了另一种钻井时对井眼进行声学采形的方法,该方法包括将在围绕用于钻探井眼的钻柱的环空内轴向来回往返传播的环空声波的信号强度与钻柱内轴向来回往返传播的钻柱声波的信号强度进行比较,确定环空声波和钻柱声波之间信号强度的偏差,以及基于确定偏差的步骤,识别沿着井眼的侧壁存在的不连续表面的深度。可选地,识别出不连续表面的深度对应于当具有所识别的偏差的环空声波和钻柱声波分别在环空中和钻柱中传播时井眼的底部的深度。该方法可选地还包括:获得一系列穿越声学信号的速度,这些穿越声学信号在钻柱内部向下传播,离开钻柱的底端,从井眼的底部反射到环空中,并且在环空中远离井眼的底部传播,并且其中在与井眼的底部所处的以下深度大致相等的一系
列井眼深度处识别出井眼中的不连续表面:在井眼的底部处于这些深度时所获得的穿越声学信号的速度小于井眼的底部在处于与这些深度邻近的较高或较低深度时获得的穿越声学信号的速度。在一个示例中,钻柱声学换能器产生钻柱声学信号和穿越声学信号,并记录反射的钻柱声学信号,并且其中环空声学换能器产生环空声学信号并记录反射的穿越声学信号和反射的环空声学信号。
附图说明
8.本发明的一些特征和优点已经陈述,其他特征和优点将在结合附图进行描述时变得明显,其中:
9.图1为钻井时对井眼进行声学采形的示例的局部剖视侧视图。
10.图2a和图2b为图1的井眼中不同深度处的分析和钻井的示例的局部剖视侧视图。
11.图3是在图1的井眼底部处于不同深度时获得的声学信号传播时间的示例的图示。
12.图4为钻井时对井眼进行声学采形的替代性示例的局部剖视侧视图。
13.图5a和图5b为图4的井眼中不同深度处的分析和钻井示例的局部剖视侧视图。
14.图6是在钻图4的井眼时获得的声学响应的示例的图示。
15.图7是补救图1的井眼中的漏失区的示例的局部剖视侧视图。
16.尽管本发明将结合优选实施例进行描述,但应理解,本发明并不局限于这些实施例。相反,本发明旨在覆盖所有的替换、修改和等同物,这些替换、修改和等同物可以包括在由所附权利要求限定的本发明的精神和范围内。
具体实施方式
17.下文将参考显示实施例的附图,对本公开的方法和系统进行更充分的描述。本公开的方法和系统可以有许多不同的形式,并且不应该被解释为限于本文阐述的图示实施例;相反,提供这些实施例是为了使本公开彻底和完整,并且将向本领域技术人员充分传达本公开的范围。本公开中相同的附图标记指代相同的元件。在一个实施例中,术语“约”的使用包括所引用数值的 /-5%。在一个实施例中,术语“基本上”包括所引用的量值、比较或描述的 /-5%。在一个实施例中,使用术语“基本上”包括所引用数值的 /-10%。
18.还应理解,本公开的范围不限于所示和所述的结构、操作、确切材料或实施例的确切细节,因为本领域技术人员显然可对其进行修改和等效。在附图和说明书中,公开了说明性实施例,尽管采用了特定术语,但这些特定术语仅用于一般和描述性意义,而非限制性目的。
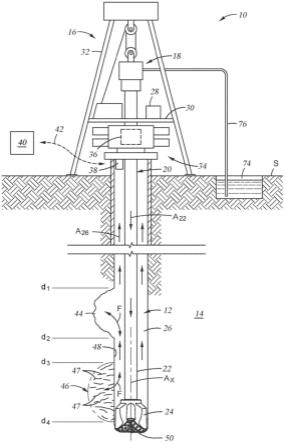
19.图1中所示的局部侧视剖视侧视图为在地层14中钻进井眼12的钻井系统10的示例。图1的钻井系统10包括钻机16,在所示的示例中,钻机16具有驱动装置18,用于旋转钻柱20以挖掘井眼12。如图所示,钻柱20包括串联联接在一起的多段钻杆22,以及位于钻杆22最下端的钻头24。用驱动装置18旋转钻柱20以与钻头24下端的齿啮合,从而从地层14中挖掘钻屑。在钻杆22和井眼12的内表面之间形成环空26。钻井系统10可选地包括钻机16内的控制器28,控制器28示出为被支撑在钻台30上,钻台30设置在井眼12的开口上方且在地面s上方。示例性钻机16包括井架32,井架32为钻台30和用于进行井眼操作的其他硬件提供支撑。井口组件34示出为安装在井眼12的开口上方且在地面s上,并且井口组件34提供井眼12中
的压力控制。以虚线轮廓示出和示意性表示的是钻柱换能器36和环空换能器38。控制器40在所示的示例中被描绘成经由通信装置42而与换能器36、38通信。通信装置42的示例包括硬连线、光纤、无线和遥测,并且以电信号或电磁信号的形式传送数据。
20.图1所示的井眼12沿其长度方向在不同深度处具有不连续的表面。图1中提供了表面不连续的示例,该表面包括冲蚀区44和具有许多裂隙47的破裂区46。示例性冲蚀区44从井眼12的侧壁48延伸一径向距离,并沿远离井眼12的轴线a
x
的方向进入地层14。冲蚀区44的上端位于井眼12中深度d1处,并且冲蚀区44具有示出为位于深度d2处的下端。破裂区46的上端开始于深度d3,破裂区46的下端位于深度d4处。破裂区46中的裂隙47由裂纹或其它断裂构成,这些裂纹或断裂导致破裂区46内的岩石特性发生变化。在一个示例中,冲蚀区44和破裂区46中的一者或两者具有足够的渗透性,使得流体f在井眼12和地层14之间连通。已知的是,在某些情况下,流体从井眼12到地层14的自由流通损害了对井眼12的控制,或者是钻井液损失的来源。在图1的示例中,在井眼12中远离冲蚀区44和破裂区46的位置,在井眼12和地层14之间没有流体连通,或者流通在可接受的操作极限内。在替代性方案中,远离冲蚀区44和破裂区46,沿着侧壁48沉积一层泥饼,该层泥饼用作井眼12和地层14之间的流动屏障。在图1的示例中进一步示出了箭头a
22
,该箭头a
22
表示在钻杆22内向井下流动的声学信号的传播方向,并且这些声学信号从井眼12的底部50反射并进入环空26中。当在环空内传播时,反射的声学信号的方向由箭头a
26
表示。
21.现在参照图2a和图2b,所示为钻井期间井眼12内成像操作的非限制性示例。压缩波p
22
示出为在钻柱22内传播,并且是方向由箭头a
22
表示的波。在图2a的示例中,压缩波p
22
离开钻柱22的底端,并从井眼50的底部反射到环空26中。压缩波p
26
示出为表示被反射的波p
22
,压缩波p
26
沿环空26向上传播,并且方向如箭头a
26
所示。为了在此说明的目的,压缩波p
22
、p
26
统称为穿越声波。图2a的示例示出了形成井眼12的示例,并且其中沿着井眼12的侧壁48的该部分没有不连续表面,相反,侧壁48的完整性是大致恒定的,并且不具有可能提供在井眼12和地层14之间流动的流体的源的区域。沿着井眼12的这一部分,钻头24的直径d
24
与井眼12的直径d
12
相同或基本接近,并且钻头24与侧壁48紧密接触。图2a的示例中所示的压缩波p
26
从井眼底部50反射,并在进入环空26之前穿过钻头24。
22.在图2b的示例中,井眼12的所示部分在不同于图2a的时间点形成,并且井眼底部50位于邻近冲蚀区44并超过深度d1的深度。在这段时间期间,压缩波p
22
继续在钻柱22内传播,离开钻柱22的底端,并从井眼底部50反射回环空26中,以形成压缩波p
26
。由于冲蚀区44邻近钻头24,井眼12的总直径d
12
超过钻头24的直径d
24
。该扩大的直径为压缩波p
26
留出了空间,使压缩波p
26
如箭头a
26
示意性所示通过流体f绕过钻头24,并返回到环空26中。
23.图3所示为曲线图52,该曲线图52图示说明了声波在井眼底部50的不同深度处的传播时间的预测值。在这个示例中,传播时间包括从穿越声波产生、向井下传播、从井眼底部50反射、以及传播回井上的时间。曲线图52中的横坐标54表示特定穿越声波(在这里也称为信号)在井眼12内传播的传播时间值(tt1,tt2,tt3,tt4)。曲线图52的纵坐标56表示在测量传播时间的时间段内井眼底部50的位置的深度(d1,d2,d3,d4)。线条(plot)58包括在曲线图52中,线条58横跨在曲线图52上的点之间,表示传播时间和井眼底部50深度的相应坐标。如图所示,线条58在深度d1前的斜率大于线条58在深度d1和d2之间的斜率。这表示在钻头24邻近不连续表面处的那些情况下,穿越声波速度(通过简单地将穿越声波信号传播的距离
除以传播时间而获得)较大。如进一步示出的,深度d2和d3之间的线条58具有类似于d0到d1的斜率,并且大于深度d1和d2之间的斜率,这表明穿越声学信号的传播速度更高。此外,深度d3至d4之间的线条58的斜率反映了减小的斜率,并且表明当钻头24邻近破裂区46并且在深度d3和d4之间时,由于遇到破裂区46,穿越声学信号的速度降低。不一定符合理论,但是据信,由于构成钻头24的材料的更大的声速,穿过钻头24的声学信号少于穿过流体的声学信号;从而当穿越声波(或信号)的路径在从井眼底部50反射后绕过钻头24而穿过流体f后,穿越声波(或信号)的传播时间增加。由于流体f中的声速小于穿过钻头24的声速,所以与井眼底部50处于不邻近不连续表面(例如图2b的冲蚀区44)处的深度时的速度相比,沿环空返回到地面s(图1)的压缩波p26的速度减小。
24.识别井眼12a的不连续表面和侧壁48a的位置的另一个示例,见图4中的侧视局部剖视图。在这个示例中,钻柱换能器36a在钻柱22a内产生压缩波。箭头a
22at
表示压缩波的向下方向,并且在该示例中,压缩波从井眼底部50a反射并保留在钻柱22a内。反射且向上的波具有由箭头a
22ar
表示的方向。此外,在该示例中,环空换能器38a产生环空声波,该环空声波在环空26a内向井下传播,并且具有由箭头a
26at
表示的方向。类似地,环空声学信号从井眼底部50a反射,并沿箭头a
26ar
所示的方向沿环空26a向上传播。在这个示例中,钻柱换能器36a记录反射的钻柱声学信号,而环空换能器38a记录反射的环空声学信号。
25.图5a和图5b为图4的钻井系统10a的示例的侧视剖视图,该钻井系统形成井眼12a的穿过地层14a的不同部分。在图5a中,井眼12a的侧壁48a保持基本坚固,并且没有任何不连续表面。在图5a的示例中,钻柱换能器36a产生压缩波p
22at
,压缩波p
22at
示出为在钻柱22a内向井下传播,并且从井眼底部50反射以形成在钻柱22a内向上传播的反射压缩波p
22ar
。在图5a的示例中进一步描绘的是,由环空换能器38a产生的压缩波p
26at
利用环空26a向井下传播,并且从井眼底部50a反射以形成反射的压缩波p
26ar
,该压缩波p
26ar
在环空26a内向井上传播。压缩波p
22at
、p
22ar
共同限定了钻柱声学信号,并且压缩波p
26at
、p
26ar
限定了环空声学信号。图5a中还示出了钻头24a的直径d
24a
基本上与井眼12a的直径d
12a
相同,因此钻头24a位于波p
26at
的路径中,从而向上和向下传播的环空声学信号穿过钻头24a。现在参照图5b,钻柱声学信号的传播与图5a基本上相同。然而,在图5b中,钻头24a邻近冲蚀区44a,冲蚀区44a为环空声学信号提供了围绕钻头24a并穿过流体f的旁路,环空声学信号在环空26a内向井下传播并从井眼底部50a反射回地面。冲蚀区44a的存在还增加了环空26a的局部横截面积,这反过来又增加了环空声学信号所传播通过的传输介质的体积。
26.图6是钻柱声学信号和环空声学信号的预测信号强度的示例的图示,其中钻柱声学信号和环空声学信号两者在井眼内向井下传播一段距离并向井上返回后被记录。在图6中是具有横坐标62的曲线图60,横坐标62表示钻筒12a被钻探的时间。纵坐标64表示在从井眼底部50a(图5b)反射后被记录的钻柱声学信号和环空声学信号的信号强度的大小,并在从井眼底部50a(图5b)反射后被记录。曲线图60中包括线条66,线条66表示在形成井眼12a(图4)时期内产生和记录的钻柱声学信号的记录信号强度。类似地,线条68表示与线条66中表示的钻柱声学信号的产生和记录基本上同时产生和记录的环空声信号的信号强度。为了说明的目的,纵坐标64中包括时间坐标t1、t2、t3、t4。图6中还示出了偏差70、72,偏差70、72表示相应的钻柱和环空声学信号的信号强度的差异。偏差70、72提供了对当钻头24a和井眼底部50a(图4)邻近不连续表面之一(例如冲蚀区44a或破裂区46a)时所导致的记录信号强
度的指示。返回参照图5b,不一定符合理论,但是据信,由冲蚀区44a(或破裂区46a)提供的额外体积为环空声学信号的衰减提供了空间,并且导致记录信号强度的暂时降低,如图6所示。为了说明的目的,偏差70示意性地示出了当井眼50a的底部邻近冲蚀区44a时的一段时间,并且偏差72表示当钻头24a邻近破裂区46a时的一段时间。在操作的非限制性示例中,上述两种成像技术都在钻特定井眼的同时进行,并且彼此结合用于识别井眼中的不连续表面。
27.在一个替代性方案中,在识别出沿井眼12的侧壁48的不连续表面的存在和深度后,进行补救。补救的示例包括对井眼12、12a的井控维持(图1和4),补救的替代性方案包括调节井眼压力、调节引入井眼的钻井液的密度、用堵漏材料填充不连续表面、以及将衬管部署到井眼中。返回参照图1,示出了配备有管线76的泥浆池74,管线76将钻井泥浆或钻井液输送到钻井装置18中,并且输送到钻柱20中。在一个示例中,调节泥浆池74内的泥浆或钻井液的密度以便对井眼进行井控维持。作为替代,图7所示的衬管76安装在井眼12内并邻近冲蚀区44。作为替代,衬管76被设置为邻近破裂区46。在该示例中,送入工具78用于部署衬管76,这防止了流体f流入相邻的地层14中。
28.在非限制性的操作示例中,正在使用钻井系统10钻探图1的井眼12,同时产生在钻柱22和环空26内传播的声学信号。穿越声学信号的示例由钻柱换能器36形成,穿越声学信号在钻柱22内向井下传播,离开钻柱22的底端,从井眼底部50反射到环空26中,传播回地面s,并由环空换能器38记录。存在替代性方案,其中用于产生和记录声学信号的装置设置在井眼12内且在地面s下。在一个实施例中,钻柱换能器36a产生穿越声学信号和钻柱声学信号,并记录反射的钻柱声学信号;可选地,在该实施例中,穿越声学信号由环空换能器38a记录,并且环空声学信号由环空换能器38a产生和记录。穿越声学信号的总传播时间是基于对特定声学信号何时产生以及特定声学信号对应的反射信号何时被记录的获知而获得的。在替代性方案中,声学信号传播距离是通过将声学信号的向下传播距离和向上传播距离相加而获得的,其中向下传播距离是从产生穿越声学信号的地方到井眼底部50的距离,而向上传播距离是从井眼底部50到记录穿越声学信号的地方的距离。在一个示例中,传播距离基于钻柱22和钻头24的长度。已知声学信号的总传播时间和传播距离,就可以获得平均速度以及总传播时间。此外,在该示例中,在钻探井眼12的时间段内记录平均速度值,并且获得反映井眼底部50的深度与每个声学信号在井眼12中向下和向上传播的传播时间的相关性。在一个实施例中,基于相对于深度分析穿越声学信号的平均速度来识别不连续表面(即冲蚀区、破裂区)并估计不连续表面在井眼中的位置,并且当特定穿越声学信号的平均速度在井眼底部的特定深度范围内变小时,识别出不连续表面。类似地,监测分别在钻柱和环空内产生的声学信号,并且当钻柱声学信号和环空声学信号被反射回地面时,记录它们的强度,从而当记录的信号强度在钻柱声学信号和环空声学信号之间存在差异时,产生不连续表面的指示。
29.因此,本文所述的本发明非常适用于实现上述目的,并且达到上述目的和优点,以及其他固有的目的和优点。虽然为了公开的目的已经描述了存在的优选实施例,但是在用于实现期望结果的过程的细节中存在许多变化。本领域技术人员将容易想到这些和其他类似的修改,并且这些和其他类似的修改旨在包含在本文公开的本发明的范围内和所附权利要求的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。