1.本发明涉及一种用于运行单辙或多辙的车辆的方法以及相应的驾驶员辅助系统。
背景技术:
2.车辆可以具有驾驶员辅助系统。例如,车辆可以具有称为巡航控制的驾驶员辅助系统,其将车辆的速度控制在围绕由车辆的驾驶员预定的目标速度值的公差范围内。
3.巡航控制可以实施为距离调节的巡航控制。然后,可以将速度调节到目标速度值,直到行驶在前面的车辆被车辆的传感器系统检测到,并且行驶在前面的车辆以小于可选目标距离的距离行驶在车辆前面。然后,车辆的功率输出被节流,直到车辆在围绕目标距离的公差范围内追尾行驶在前面的车辆。距离调节的巡航控制也可以操控车辆的制动系统,以便使距离保持在公差范围内。
技术实现要素:
4.在此背景下,利用这里提出的方案提出了根据独立权利要求的一种用于运行单辙或多辙的车辆的方法和相应的驾驶员辅助系统,以及最后提出了一种相应的计算机程序产品和一种机器可读的存储介质。对这里提出的方案的有利的改进方案和改善方案来自说明书并在从属权利要求中进行了描述。
5.本发明的优点,本发明的实施方式可以有利地允许单辙或多辙的车辆的驾驶员可以像往常一样使用车辆的行驶踏板或加速踏板或行驶旋转手柄或加速手柄,以便控制车辆的速度,直到车辆接近行驶在前面的车辆或速度接近由驾驶员选择的目标速度。
6.如果在由驾驶员当前设定的行驶踏板角度或由驾驶员当前设定的手柄位置下,车辆会将与行驶在前面的车辆的距离减小到目标距离以下,则通过系统干预将车辆减速,直到保持目标距离。驾驶员在此可以通过行驶踏板角度或手柄位置在与速度相关的缓冲区域内影响目标距离。
7.如果在由驾驶员当前设定的行驶踏板角度或由驾驶员当前设定的手柄位置下,车辆将快于目标速度行驶,则通过系统干预同样会使车辆制动,直到保持目标速度。驾驶员在此可以在系统规定的速度范围内自由选择目标速度。通过大力踩下行驶踏板或转动行驶旋转手柄,可以超过目标速度。驾驶员也不能选择目标速度。系统规定的速度范围也可以通过大力踩下行驶踏板或转动行驶旋转手柄来超过。但是,驾驶员在离开速度范围之前会被警告,因为速度范围以上的距离调节由于系统原因而被停用,或者功能可能受到限制。
8.提出了一种用于运行单辙或多辙的车辆的方法,其中调节车辆的速度和车辆与行驶在前面的车辆的距离,其中在使用车辆的操作元件的位置的情况下将速度调节在系统规定的速度范围内,并调节到可在速度范围内选择的可选的目标速度,其中在超过速度范围的上限之前向车辆的驾驶员提供警告信号,其中速度范围内的距离根据位置调节在与速度相关的距离缓冲区域内。
9.关于本发明的实施方式的思想尤其可以被认为是基于下面描述的思想和知识。
10.例如,车辆可以是轿车、卡车、摩托车或越野车。轿车和卡车可以具有行驶踏板或者加速踏板作为操作元件。摩托车可以具有行驶旋转手柄或加速手柄作为操作元件。越野车可以具有行驶杆或加速杆作为操作元件。因此,操作元件的位置可以是行驶踏板角度、手柄位置或杠杆位置。
11.所述车辆可具有用于检测特别是在车辆前面的检测区域的传感器系统。例如,传感器系统可以是基于雷达的、基于激光雷达的或基于摄像机的。当另一车辆行驶在车辆前面的检测区域内时,传感器系统可以检测到两车之间的距离。可以为车辆的至少一个驾驶员辅助系统提供关于距离的信息。系统规定的速度范围可以有上限和下限。车辆规定的速度范围可以根据车辆的特性和车辆中容纳的部件限定。例如,上限可以通过传感器系统的性能来确定。例如,传感器系统的至少一个传感器的传感器作用范围可以确定上限。例如,下限可以是车辆的静止。
12.目标速度可以由车辆的驾驶员可选地预定。例如,目标速度可以通过轿车的踏板位置、摩托车的手柄位置或越野车的杠杆位置来设定并且然后存储。例如,可以通过驾驶员辅助系统的接口设定和再次删除目标速度。例如,接口可以实施为杠杆、按钮或触摸操作面板。目标速度也可以以固定的步骤或间隔增加或减小。同样,目标速度可以设置为预先存储的值。目标速度也可以通过车辆的标志识别来预定。在目标速度以下,驾驶员可以通过操作元件确定车辆的速度。即使驾驶员踩下车辆的制动踏板或拉动制动手柄,目标速度也优选地保持活跃。
13.在车辆和行驶在前面的车辆之间可以布置距离缓冲区域。距离缓冲区域在高速时可能比在低速时距离行驶在前面的车辆更远。当车辆在距离缓冲区域内时,驾驶员将行驶踏板压得越远,或将行驶旋转手柄转动得越大,车辆就越接近行驶在前面的车辆。距离缓冲区域可以起到车辆之间虚拟气垫的作用。驾驶员将行驶踏板压得越远,或将行驶旋转手柄转动得越大,气垫就会被压缩得越多,反之亦然。在此至少始终保持与行驶在前面的车辆的最小的与速度相关的安全距离。
14.同样,当车辆行驶在距离缓冲区域内且行驶在前面的车辆制动时,在使用其驱动器和/或其制动器的情况下使车辆制动,以便保持通过操作元件根据速度设定的距离。
15.在车辆行驶超过速度范围的上限之前,驾驶员借助于警告信号被警告,因为超过上限的距离无法再可靠地调节。
16.在超过目标速度之前,同样可以提供警告信号。目标速度不是硬性限制并且可以跨越。但是例如可以超过当前适用的速度限制,这需要驾驶员自行承担风险。
17.可以为驾驶员提供可见的指示作为警告信号。例如,可以激活警示灯。警告符号同样也可以显示在驾驶员的视野中。
18.车辆的车辆特征的变化可以设定为警告信号。车辆的车辆特征可以是车辆的驾驶员可感知的特性。例如,车辆可以实施加速度震动。加速度震动在此可以是正的或负的。同样,警告可以通过操作元件、方向盘或座椅的振动来传递。
19.可以增加操作元件的阻力作为车辆特征的改变。由于阻力的增加,需要更大的力来克服阻力。增加的阻力可以短期维持。同样,只要车辆以高于上限的速度行驶,增加的阻力就可以维持。
20.可以设定不接受操作元件的位置的改变作为车辆特征的改变。在不接受时在驱动
器不提供更多功率的情况下可以更用力地踩下行驶踏板或者转动行驶旋转手柄,即驾驶员的位置变化几乎被车辆忽略。相反,如果踩下行驶踏板的力度较小或转动行驶旋转手柄的力度较小,驱动器可以立即降低输出功率。不接受可以通过降档来克服。
21.如果位置梯度大于跨越值,则可以跨越目标速度和/或上限。位置梯度表示操作元件的运动速度。因此,位置梯度可以是行驶踏板角度梯度或行驶旋转手柄角度梯度。在高位置梯度下,操作元件快速操作。例如,在驾驶员有意超过目标速度和/或上限的特殊情况下,可以使用高位置梯度。
22.可以根据驾驶员辅助系统的系统状态设定上限。例如,当传感器系统的识别性能下降时,驾驶员辅助系统可以降低上限。例如,于是行驶在前面的车辆可能会被识别得太晚。如果车辆的车轮失去对地面的附着,同样可以降低上限。然后,车辆的制动性能可能会恶化并且安全距离可能无法保持。比如,降雨时可以降低上限,以便保证车辆的安全运行。同样,如果车辆在松散或光滑的地面上行驶,则可以降低上限。
23.该方法可以例如在软件或硬件中或者例如在控制器中以软件和硬件的混合形式实现。
24.这里提出的方案还创建了驾驶员辅助系统,其被构造以便在相应的装置中执行、操控或实现这里提出的方案的变体的步骤。
25.驾驶员辅助系统可以是具有至少一个用于处理信号或数据的计算单元、至少一个用于存储信号或数据的存储单元以及至少一个用于读取或输出嵌入到通信协议中的数据的接口和/或通信接口的电气设备。计算单元可以例如是信号处理器、所谓的系统asic或微控制器,用于处理传感器信号并根据传感器信号输出数据信号。该存储单元可以例如是闪存、eprom或磁性存储单元。该接口可构造为用于从传感器读取传感器信号的传感器接口和/或用于将数据信号和/或控制信号输出到执行器的执行器接口。所述通信接口可以构造用于以无线方式和/或有线方式读取或输出所述数据。接口也可以是软件模块,该软件模块例如与其他软件模块一起存在于微控制器上。
26.具有程序代码的计算机程序产品或计算机程序也是有利的,其可存储在诸如半导体存储器、硬盘存储器或光学存储器的机器可读的载体或存储介质上,并且用于执行、实现和/或操控根据上述实施方式之一的方法的步骤,特别是当程序产品或程序在计算机或驾驶员辅助系统上实施时。
27.要指出的是,本文参照不同的实施方式描述了本发明的可能的特征和优点中的一些。本领域技术人员认识到,控制器和方法的特征可以适当地组合、调整或交换,以获得本发明的进一步实施方式。
附图说明
28.下文参照附图描述本发明的实施方式,其中,附图和说明书均不被解释为对本发明有限制性。
29.图1示出了根据实施例的具有驾驶员辅助系统的车辆的图示。
30.附图只是示意性的并且不是比例的。附图中相同的附图标记表示相同或相同作用的特征。
具体实施方式
31.图1示出了根据实施例的具有驾驶员辅助系统102的车辆100的图示。车辆100在此是轿车。这里介绍的方案相应地也可在摩托车、卡车或四轮摩托车或越野车中使用。车辆100具有传感器系统104,用于检测至少在车辆100前面的行驶方向上的其他车辆。可以在传感器系统104的传感器作用范围106内检测其他车辆。传感器作用范围106是特定于传感器系统104的。传感器作用范围106还取决于环境条件。例如,在雨中的传感器作用范围106比在没有雨的情况下要小。
32.当传感器系统104检测到行驶在车辆100前面的车辆108时,提供映射车辆100与行驶在前面的车辆108之间的距离112的距离信息110。
33.车辆100的操作元件114提供操作元件信号116。操作元件信号116映射操作元件114的瞬时位置118。在此轿车的行驶踏板114提供行驶踏板信号116。行驶踏板信号116映射行驶踏板114的瞬时行驶踏板角度118。
34.车辆100的速度传感器120将车辆100的当前速度122映射在速度信号124中。
35.驾驶员辅助系统102读取操作元件信号116、速度信号124和距离信息110。
36.只要距离112大于与速度相关的距离极限126,并且速度122在系统规定的速度范围128内,位置118就直接转换为加速度额定值130。因此,车辆100的驾驶员可以通过操作元件114照常控制速度122。
37.如果距离112小于与速度相关的距离极限126,并且速度122在系统规定的速度范围128内,则位置118被转换为用于驾驶员辅助系统102的距离调节器134的目标距离132。可以在距离缓冲区域136内设定目标距离132。距离缓冲区域136开始于与速度相关的距离极限126,并且结束于与行驶在前面的车辆108的与速度相关的安全距离138。距离调节器134在使用距离112和目标距离132的情况下调节加速度额定值130或制动额定值140。
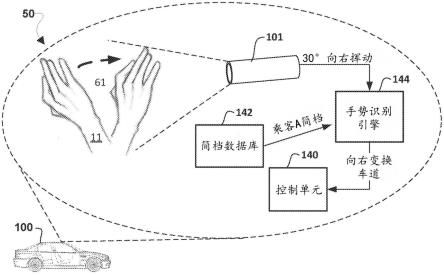
38.如果速度122将超过速度范围128的上限142,则由警告信号144警告驾驶员,因为高于上限142的传感器系统104的传感器作用范围106不足以可靠地提供距离信息110。
39.驾驶员可在速度范围128内可选地为驾驶员辅助系统102的速度调节器148设置目标速度146。如果距离112大于与速度相关的距离极限126,并且速度122小于目标速度146,则位置118直接转换为加速度额定值130。当速度122达到目标速度146或在达到目标速度146前不久,速度调节器148减小加速度额定值130。
40.如果距离112在距离缓冲区域136内,并且速度122小于目标速度146,则将位置118转换为目标距离132。当速度122达到目标速度146或在达到目标速度146前不久,速度调节器148减小加速度额定值130,即使由此距离112大于目标距离132。
41.在一个实施例中,由于距离调节依赖于环境条件,当环境条件恶化时,上限142被降低。为此,驾驶员辅助系统读取映射环境条件的环境信息150,并根据环境条件调整上限142。
42.换句话说,描述了速度限制器的自动激活。
43.在车辆中,有不同的驾驶员辅助系统,其为驾驶员提供更好的舒适性和安全性,例如适应性巡航控制(acc)和高速公路辅助(hwa)。此外,其他辅助系统通过距离警告和紧急制动干预提供安全增益。
44.另一个面向驾驶员的辅助功能“动态距离辅助”(dda),主要是为驾驶员卸下通过
踏板制动的大部分任务,但让他来操作加速踏板。
45.对于距离限制器或也对于dda提供以下可行性,激活速度限制器或acc作为补充。因此不仅可以确保保证最小距离,而且可以保持预定的最大速度。
46.当前的acc系统在此具有不同的最大速度(例如160 km/h、210 km/h或250 km/h),它们可以预先设定。因此确保acc通过达到其期望的和已知的性能而在速度范围内使用。它对于驾驶员来说是可以控制的。
47.对于保持距离的功能、如距离限制器或dda,问题是当驾驶员自己通过行驶踏板预定速度时,如何提醒驾驶员注意系统限制、特别是在跑车领域中在更高的速度下。
48.在在此提出的方案中,当距离限制器或dda被激活时,速度上限(v-max)被自动激活。因此驾驶员意识到,他在使用这些辅助功能时只能在一定的速度范围内依赖期望的性能。除了自动激活速度上限外,这里还介绍了一个两级限制器。
49.第一个速度限制类似于迄今已知的速度限制器。例如,它可以对于城市情况设定为50 km/h或者对于高速公路情况设定为120 km/h。激活条件、功能行为和停用条件在此可以像已知的那样。
50.第二个速度限制是为考虑传感器性能而设计的(例如160 km/h、210 km/h、250 km/h)。第二个速度限制可能必要时略高于用于acc的情况,因为驾驶员通过使用加速踏板在行驶过程中是活跃的。第二个速度限制可以在距离限制器或dda激活时自动激活。第二个速度限制不能或不能简单地和/或不能在行驶期间通过操作装置改变,因为它涉及传感器性能。
51.然而,在一个实施例中,它在一定的范围内是可变的,并且可以适应环境条件。因此,例如能够在大雨中速度上限被调整。上限在此不会通过设置正常/下限来替换或停用。即使停用了下限速,上限速也会保持不变。
52.如果驾驶员仍然希望将速度提高到上限以上,那么他可以通过使用操控装置停用距离限制器或dda来实现这一点。他也可以通过非常高的行驶踏板角度或降档来临时停用。有利的是,在接近速度上限时,驾驶员会被足够早地提醒,以便他在需要时能够及时超越上限。速度上限也可用于没有可调节的已知的速度限制器的车辆中。
53.最后,应当指出的是,诸如“具有”、“包括”等术语并不排除其他元件或步骤并且诸如“一个”或“一”等术语也不排除多个。权利要求书中的附图标记不应被视为限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。