技术特征:
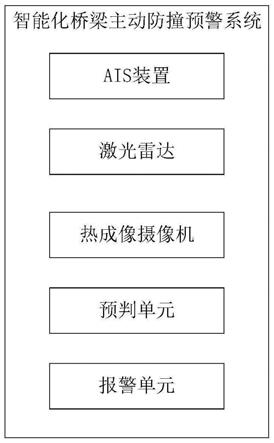
1.一种智能化桥梁主动防撞预警系统,其特征在于,包括:ais装置,分别设置在桥梁、船舶上,用于获取船舶的航行信息;激光雷达,设置在桥梁上,用于实时监测船舶与桥梁之间的距离以及船舶的船体三维信息;热成像摄像机,设置在桥梁上,用于实时监测船舶在水面上的实际高度信息;预判单元,设置在桥梁上,用于根据船舶的航行信息、实际高度、船体三维信息和储存的桥梁信息进行桥梁防撞预判,并给出安全指引信息;报警单元,分别设置在桥梁、船舶上,用于根据桥梁防撞预判对船舶进行警示,并将安全指引信息发送到船舶。2.根据权利要求1所述的一种智能化桥梁主动防撞预警系统,其特征在于,所述船舶的航行信息包括:船舶的船宽、航向、航速和转向率;所述预判单元包括:采集模块,分别与所述ais装置、激光雷达、热成像摄像机连接,用于检测到的信息;处理模块,与所述采集模块连接,用于对采集到的数据进行处理和分析后作出预判,并给出安全指引信息。3.根据权利要求2所述的一种智能化桥梁主动防撞预警系统,其特征在于,所述处理模块用于根据船舶的宽度与桥梁的信息判断船舶能否通过桥梁;当船舶的宽度超过桥梁的限制通过宽度,所述处理模块给出船舶不能通过桥梁的预判;当船舶的宽度未超过桥梁的限制通过宽度,则所述处理模块给出船舶满足通过桥梁的第一条件。4.根据权利要求3所述的一种智能化桥梁主动防撞预警系统,其特征在于,当船舶满足通过桥梁的第一条件后,所述处理模块用于根据船舶的实际高度与桥梁的信息判断船舶能否通过桥梁;当船舶的实际高度超过桥梁的限制通过高度,所述处理模块给出船舶不能通过桥梁的预判;当船舶的实际高度未超过桥梁的限制通过高度,则所述处理模块给出船舶满足通过桥梁的第二条件。5.根据权利要求4所述的一种智能化桥梁主动防撞预警系统,其特征在于,当船舶依次满足通过桥梁的第一条件和第二条件后,所述处理模块用于根据船舶原有的航向与桥梁的信息判断是否给出船舶作出调整的安全指引信息;当所述处理模块预判到船舶按照原有的航向航行不会撞到桥梁时,所述处理模块无需给出船舶作出调整的安全指引信息;当所述处理模块预判到船舶按照原有的航向航行会撞到桥梁时,则所述处理模块根据船舶与桥梁的直线距离来选择是否准备调整船舶转向率。6.根据权利要求5所述的一种智能化桥梁主动防撞预警系统,其特征在于,当所述处理模块预判到船舶按照原有的航向航行会撞到桥梁时,所述处理模块用于根据船舶与桥梁的直线距离来选择是否准备调整船舶转向率;其中,所述处理模块用于设定船舶与桥梁的直线距离s0,所述采集模块用于实时采集船舶与
桥梁的直线距离为
△
s,所述处理模块还用于判断实时采集到的船舶与桥梁的直线距离为
△
s是否大于船舶与桥梁的直线距离s0,并根据判断结果给出是否调整船舶转向率
△
l:当
△
s>s0时,所述处理模块不对船舶转向率
△
l进行调整;当
△
s≤s0时,则所述处理模块对船舶转向率
△
l进行调整。7.根据权利要求6所述的一种智能化桥梁主动防撞预警系统,其特征在于,当
△
s≤s0,对船舶转向率
△
l进行调整时,所述采集模块用于根据采集到的船舶与桥梁的直线距离
△
s调整船舶转向率
△
l;其中,所述处理模块用于预设第一预设船舶与桥梁的直线距离s1、第二预设船舶与桥梁的直线距离s2、第三预设船舶与桥梁的直线距离s3和第四预设船舶与桥梁的直线距离s4,且s0>s1>s2>s3>s4;所述处理模块还用于预设第一预设船舶转向率调节系数x1、第二预设船舶转向率调节系数x2、第三预设船舶转向率调节系数x3和第四预设船舶转向率调节系数x4,且1<x1<x2<x3<x4<1.3;所述处理模块用于根据实时采集到的船舶与桥梁的直线距离
△
s与各预设船舶与桥梁的直线距离si之间的关系调整船舶转向率:当s1>
△
s≥s2时,选定所述第一预设船舶转向率调节系数x1对船舶转向率进行调整,调整后的船舶转向率为
△
l*x1;当s2>
△
s≥s3时,选定所述第二预设船舶转向率调节系数x2对船舶转向率进行调整,调整后的船舶转向率为
△
l*x2;当s3>
△
s≥s4时,选定所述第三预设船舶转向率调节系数x3对船舶转向率进行调整,调整后的船舶转向率为
△
l*x3;当s4>
△
s时,选定所述第四预设船舶转向率调节系数x4对船舶转向率进行调整,调整后的船舶转向率为
△
l*x4。8.根据权利要求7所述的一种智能化桥梁主动防撞预警系统,其特征在于,在选定第i预设船舶转向率调节系数xi对船舶转向率进行调整,并获取调整后的船舶转向率为
△
l*xi后,i=1,2,3,4,包括:所述采集模块用于实时采集船舶的航速
△
a,所述处理模块用于预设船舶的航速a1、第二预设船舶的航速a2、第三预设船舶的航速a3和第四预设船舶的航速a4,且a1<a2<a3<a4;所述处理模块还用于预设第一预设修正系数y1、第二预设修正系数y2、第三预设修正系数y3和第四预设修正系数y4,且1.1<y1<y2<y3<y4<1.5;所述处理模块根据实时采集到的船舶的航速
△
a与各预设船舶的航速ai之间的关系对调整后的船舶转向率为
△
l*xi进行修正:当a1<
△
a≤a2时,选定所述第一预设修正系数y1对船舶转向率
△
l*xi进行修正,修正后的船舶转向率为
△
l*xi*y1;当a2<
△
a≤a3时,选定所述第二预设修正系数y2对船舶转向率
△
l*xi进行修正,修正后的船舶转向率为
△
l*xi*y2;当a3<
△
a≤a4时,选定所述第三预设修正系数y3对船舶转向率
△
l*xi进行修正,修正后的船舶转向率为
△
l*xi*y3;当a4<
△
a时,选定所述第四预设修正系数y4对船舶转向率
△
l*xi进行修正,修正后的船舶转向率为
△
l*xi*y4。
技术总结
本发明公开了一种智能化桥梁主动防撞预警系统,其包括AIS装置分别设置在桥梁、船舶上,用于获取船舶的航行信息;激光雷达设置在桥梁上,用于实时监测船舶与桥梁之间的距离以及船舶的船体三维信息;热成像摄像机设置在桥梁上,用于实时监测船舶在水面上的实际高度信息;预判单元设置在桥梁上,用于根据船舶的相关信息和储存的桥梁信息进行桥梁防撞预判,并给出安全指引信息;报警单元分别设置在桥梁、船舶上,用于根据桥梁防撞预判对船舶进行警示,并将安全指引信息发送到船舶。本发明利用雷达技术、热成像结合AIS技术对桥区通航船舶的航行状态进行监测,并给出安全指引信息,避免船舶撞击桥梁,最大程度减少事故发生,保障桥梁的安全。桥梁的安全。桥梁的安全。
技术研发人员:刘绮里 陈蔡辉 薛晓丹 徐敏 潘宸 杨健 潘杨 徐静 殷云峰 杨斌 季佳根 王院生 马建新 周鹭 陈浩亮
受保护的技术使用者:华能国际电力江苏能源开发有限公司南通电厂
技术研发日:2022.10.19
技术公布日:2023/2/23
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。