1.本发明涉及一种马达驱动装置,更详细地,涉及一种在马达的线圈的两端分别连接有逆变器的开口端绕组方式的马达驱动装置。
背景技术:
2.通常,包括在马达的各相的线圈的一端连接到一个逆变器,并且另一端彼此连接以形成y型接线。
3.在马达驱动时,逆变器内的开关元件(switching element)在通过脉宽调制控制而被接通/断开的同时,将线间电压(phase-to-phase voltage)施加到y型接线的马达的线圈以产生交流电流,从而产生扭矩。
4.如上所述,将由马达产生的扭矩用作动力的电动车辆等环保车辆的燃料效率(或电效率)取决于逆变器-马达的功率转换效率,因此,为了提高燃料效率,最大化逆变器的功率转换效率和马达的效率是很重要的。
5.逆变器-马达系统的效率主要取决于逆变器的电压利用率,当在电压利用率较高的区间形成由马达速度和扭矩的关系来确定的车辆的操作点时,可以提高车辆的燃料效率。
6.然而,为了增加马达的最大扭矩而增加马达的线圈数时,电压利用率较高的区间会远离作为车辆的主要操作点的低扭矩区域,从而可能会导致燃料效率变差的问题。另外,从燃料效率方面来看,当电压利用率较高的区间被设计为包括主要操作点时,会对马达的最大扭矩产生限制,从而可能会导致车辆的加速启动性能降低的问题。
7.为了解决这种问题,在本技术领域中提出了一种开口端绕组(open end winding,oew)方式的马达驱动方法,该方法通过在马达的线圈两端分别连接逆变器来驱动两个逆变器,而不是通过对马达的线圈一端进行y接线来使其短路。
8.相比现有的y接线结构的马达驱动方法,这种开口端绕组方式的马达驱动方法可以通过增加相电压来提高电压利用率,并且具有可实现高输出的优点。
9.然而,在开口端绕组方式的马达驱动方法中,当在分别连接到马达的线圈两端的逆变器应用共同的直流电源时,无法在逆变器切换(switching)周期上平均地将0相分量电压控制为0,因此,可能会产生共模电流。所述共模电流在流经马达的线圈时起到铜损和铁损等损失作用,因此会降低马达效率,在严重的情况下,可能会导致马达系统的烧毁。
10.作为上述背景技术所说明的内容仅用于增强对本发明的背景的理解,不应被视为承认属于本领域普通技术人员已知的现有技术。
11.现有技术文献
12.(专利文献1)us 2009-0033253 a1
13.(专利文献2)jp 6285256 b2
技术实现要素:
14.(一)要解决的技术问题
15.因此,本发明要解决的技术问题为,提供一种马达驱动装置,其在进行分别将逆变器连接到马达线圈的两端的开口端绕组方式的马达驱动时,将两个逆变器之间的共模电压设置为相同,以按照期望来控制0相分量电压,由此,可消除由于差而导致的循环电流,从而提高马达效率。
16.尤其,本发明要解决的技术问题为,提供一种马达驱动装置,其在进行分别将逆变器连接到马达线圈的两端的开口端绕组方式的马达驱动时,使得两个逆变器瞬时具有相同的0相分量电压,从而可以使两个逆变器的0相分量电压之差瞬时变为0。
17.(二)技术方案
18.作为解决上述技术问题的方法,本发明提供一种马达驱动装置,
19.所述马达驱动装置驱动具有分别对应于多个相的多个线圈的马达,所述马达驱动装置包括:
20.第一逆变器,包括多个第一开关元件,并且连接到所述多个线圈中的每一个的第一端;
21.第二逆变器,包括多个第二开关元件,并且连接到所述多个线圈中的每一个的第二端;以及
22.控制器,基于预设的所述马达的电压指令,产生用于空间向量脉宽调制的被限制的极电压指令,并通过分配所述被限制的极电压指令来产生用于切换所述第一开关元件的第一极电压指令和用于切换所述第二开关元件的第二极电压指令。
23.在本发明的一个实施例中,为了产生所述被限制的极电压指令,所述控制器可以对所述马达的电压指令执行比马达的旋转角领先或落后30度的克拉克/派克逆变换,从而产生对所述马达的每个相的相电压指令。
24.在本发明的一个实施例中,所述控制器可以产生对应于所述相电压指令中的最大值和最小值的平均的偏移电压,并且可以通过从所述相电压指令分别减去所述偏移电压来产生所述被限制的极电压指令。
25.在本发明的一个实施例中,所述被限制的极电压指令的上限值可以是所述被限制的极电压指令的下限值可以是v
dc
为所述第一逆变器和所述第二逆变器的直流端电压。
26.在本发明的一个实施例中,所述被限制的极电压指令的上限值可以是所述被限制的极电压指令的下限值可以是v
dc
为所述第一逆变器和所述第二逆变器的直流端电压,v
n*
为所述马达的电压指令的0相分量,amp为表示大小的运算子。
27.在本发明的一个实施例中,所述控制器可以对所述被限制的极电压指令乘以通过在乘以的被限制的极电压指令加上所述马达的电压指令的0相分量的p1倍来产生所述第一极电压指令,通过从乘以的被限制的极电压指令减去所述马达的电压指令的0相分量的p2倍来产生所述第二极电压指令,其中,p1 p2=1。
28.在本发明的一个实施例中,所述p1和p2可以具有不同的值。
29.在本发明的一个实施例中,所述控制器在执行比所述马达的旋转角领先30度的克拉克/派克逆变换时,可以将所述第一极电压指令的a相、b相和c相分量确定为分别对应于所述被限制的极电压指令的a相、b相和c相分量,可以将所述第二极电压指令的a相、b相和c相分量确定为分别对应于所述被限制的极电压指令的b相、c相和a相分量。
30.在本发明的一个实施例中,所述控制器在执行比所述马达的旋转角领先30度的克拉克/派克逆变换时,可以在所述被限制的极电压指令的a相、b相和c相分量乘以的值分别加上所述马达的电压指令的0相分量的p1倍,以分别产生所述第一极电压指令的a相、b相和c相分量,可以从所述被限制的极电压指令的b相、c相和a相分量乘以的值分别减去所述马达的电压指令的0相分量的p2倍,以分别产生所述第二极电压指令的a相、b相和c相分量。
31.在本发明的一个实施例中,所述控制器在执行比所述马达的旋转角落后30度的克拉克/派克逆变换时,所述第一极电压指令的a相、b相和c相分量可以分别对应于所述被限制的极电压指令的a相、b相和c相分量,所述第二极电压指令的a相、b相和c相分量可以分别对应于所述被限制的极电压指令的c相、a相和b相分量。
32.在本发明的一个实施例中,所述控制器在执行比所述马达的旋转角落后30度的克拉克/派克逆变换时,可以在所述被限制的极电压指令的a相、b相和c相分量乘以的值分别加上所述马达的电压指令的0相分量的p1倍,以分别产生所述第一极电压指令的a相、b相和c相分量,可以从所述被限制的极电压指令的c相、a相和b相分量乘以的值分别减去所述马达的电压指令的0相分量的p2倍,以分别产生所述第二极电压指令的a相、b相和c相分量。
33.(三)有益效果
34.根据所述马达驱动装置,可以按照期望来控制应用在开口端绕组方式的两个逆变器的0相分量电压,由此抑制共模电流产生。
35.因此,根据所述马达驱动装置,可以通过防止由于共模电流而导致的马达相电流失真来容易地控制电流,并且不仅可以通过防止由于循环电流而导致的马达的铁损和铜损等损失来显著提高马达的驱动效率,还可以事先防止马达的烧毁。
36.尤其,根据所述马达驱动装置,在进行开口端绕组方式的马达驱动时,可以将0相分量电压瞬时变为0,由此,还可以消除由0相分量电流(共模电流)的瞬时脉动导致的马达损失。
37.另外,根据所述马达驱动装置,在基于马达的电压指令首先执行空间向量脉宽调制后,基于输出的结果产生对每个逆变器的极电压指令,因此,可最小化用于坐标转换的运算量,由此,可以最小化在电压调制运算中由于余弦、正弦运算而导致的离散误差。
38.本发明能获得的效果不限于上述提及的效果,本发明所属技术领域的普通技术人员可以通过以下说明清楚地理解未被提及的本发明的其他效果。
附图说明
39.图1是根据本发明的一个实施例的马达驱动装置的电路图。
40.图2是详细示出用于通过开口端绕组方式来控制马达的通常的控制器的结构框图。
41.图3是用于说明应用于图2所示的通常的控制器中的马达控制方法的电压向量图。
42.图4是示出当通过图2所示的通常的控制器来控制马达时产生的每个逆变器的电压输出的波形图。
43.图5是更详细地示出图2所示的通常的控制器内的空间向量调制部的结构框图。
44.图6是详细示出应用于根据本发明的一个实施例的马达驱动装置的控制器的结构框图。
45.图7是更详细地示出应用于图6所示的根据本发明的一个实施例的马达驱动装置的控制器内的空间向量调制部的结构框图。
46.图8是示出通过图6所示的根据本发明的一个实施例的马达驱动装置的控制来产生的每个逆变器的电压输出的波形图。
47.图9是详细示出应用于根据本发明的另一实施例的马达驱动装置的控制器的结构框图。
48.图10是用于说明在图9所示的本发明的实施例中将第一逆变器的相电压指令转换为使得比马达的旋转角领先30度,并且将第二逆变器的相电压指令转换为使得比马达的旋转角领先150度的示例的电压向量图。
49.图11是用于说明在图9所示的本发明的实施例中将第一逆变器的相电压指令转换为使得比马达的旋转角落后30度,并且将第二逆变器的相电压指令转换为使得比马达的旋转角落后150度的示例的电压向量图。
50.图12是示出通过图9所示的根据本发明的实施例的马达驱动装置的控制来产生的每个逆变器的电压输出、0相电压分量以及共模电流的波形图。
51.图13是详细示出应用于根据本发明的又一实施例的马达驱动装置的控制器的结构框图。
52.图14是更详细地示出图13所示的空间向量脉宽调制部的结构框图。
53.图15是示出对图13所示的实施例的控制器的变形例的结构框图。
54.附图标记说明
55.10:第一逆变器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20:第二逆变器
56.30:控制器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100:马达
57.200:电池
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
61、81:电流指令映射
58.62、82:电流控制部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
63、64、83、84:占空比产生部
59.631、641、831、832、841、841:乘法部
60.632、642、833、843:坐标转换部
61.633、634、834、844:空间向量脉宽调制部
62.71:偏移电压产生部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
711:偏移电压指令合成部
63.72:极电压指令产生部
ꢀꢀꢀꢀꢀꢀꢀ
73:极电压指令限制部
64.74:除法部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
75:加法部
65.91:坐标转换部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
92:空间向量脉宽调制部
66.921:偏移电压产生部
ꢀꢀꢀꢀꢀꢀꢀꢀ
922:极电压指令产生部
67.923:极电压指令限制部
ꢀꢀꢀꢀꢀꢀ
93:抗饱和运算部
68.94、95、951、952:乘法部
ꢀꢀꢀ
961:第一极电压指令产生部
69.962:第二极电压指令产生部
ꢀꢀ
s11-s16:第一开关元件
70.s21-s26:第二开关元件
ꢀꢀꢀꢀꢀꢀ
s31-s33:第三开关元件
71.l1-l3:线圈
具体实施方式
72.以下,参照附图对根据本发明的各种实施例的马达驱动装置进行详细说明。
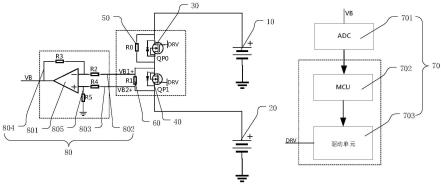
73.图1是根据本发明的一个实施例的马达驱动装置的电路图。
74.参照图1,根据本发明的一个实施例的马达驱动装置为通过具有对应于多个相的多个线圈l1-l3的马达100来提供驱动电力的马达驱动装置,其可以包括:第一逆变器10,包括多个第一开关元件s11-s16,并且连接到马达100的每个线圈的第一端;第二逆变器20,包括多个第二开关元件s21-s26,并且连接到马达100的每个线圈的第二端;以及控制器30,基于马达100的所需功率,对第一开关元件s11-s16和第二开关元件s21-s26进行脉宽调制控制。
75.第一逆变器10和第二逆变器20可以将存储在电池200的直流电力转换为三相的交流电力并提供至马达100,或者可以在再生制动时将由于马达100的再生制动扭矩的产生而产生的再生制动能量转换为直流并提供到电池200。这种直流电力和交流电力之间的转换可以通过分别设置在第一逆变器10和第二逆变器20的多个第一开关元件s11-s16和多个第二开关元件s21-s26的脉宽调制控制来执行。
76.第一逆变器10可以包括多个支路(leg)11-13,形成在连接于电池200的两端之间的直流链路电容300的直流电压施加到多个支路11-13。每个支路11-13可以分别与马达100的多个相对应,并形成电连接。
77.更具体地,第一支路11包括在直流电容300的两端之间彼此串联的两个开关元件s11、s12,两个开关元件s11、s12的连接节点可以连接到马达100内的一个相的线圈l1的一端,以输入/输出对应于多个相中的一个相的交流电力。
78.同样地,第二支路12包括在直流电容300的两端之间彼此串联的两个开关元件s13、s14,两个开关元件s13、s14的连接节点可以连接到马达100内的一个相的线圈l2的一端,以输入/输出对应于多个相中的一个相的交流电力。
79.另外,第三支路13包括在直流电容300的两端之间彼此串联的两个开关元件s15、s16,两个开关元件s15、s16的连接节点可以连接到马达100内的一个相的线圈l3的一端,以输入/输出对应于多个相中的一个相的交流电力。
80.第二逆变器20同样可以具有与第一逆变器10相似的结构。第二逆变器20可以包括多个支路21-23,形成在连接于电池200的两端之间的直流链路电容300的直流电压施加到多个支路21-23。每个支路21-23可以分别与马达100的多个相对应,并形成电连接。
81.更具体地,第一支路21包括在直流电容300的两端之间彼此串联的两个开关元件s21、s22,两个开关元件s21、s22的连接节点可以连接到马达100内的一个相的线圈l1的另一端,以输入/输出对应于多个相中的一个相的交流电力。
82.同样地,第二支路22包括在直流电容300的两端之间彼此串联的两个开关元件
s23、s24,两个开关元件s23、s24的连接节点可以连接到马达100内的一个相的线圈l2的另一端,以输入/输出对应于多个相中的一个相的交流电力。
83.另外,第三支路23包括在直流电容300的两端之间彼此串联的两个开关元件s25、s26,两个开关元件s25、s26的连接节点可以连接到马达100内的一个相的线圈l3的另一端,以输入/输出对应于多个相中的一个相的交流电力。
84.第一逆变器10连接到马达100的线圈l1-l3的一端,第二逆变器20连接到马达100的线圈l1-l3的另一端。即,在马达100的线圈l1-l3的两端中,可以形成分别连接到第一逆变器10和第二逆变器20的开口端绕组方式的电连接。
85.控制器30基本上是对包括在第一逆变器10和第二逆变器20的开关元件s11-s16、s21-s26进行脉宽调制控制,以能够基于马达100所需的所需功率来驱动马达100的组件。
86.控制器30可以通过接收施加到第一逆变器10和第二逆变器20的直流电压v
dc
、从电流传感器(未示出)检测到的提供至马达100的相电流以及设置在马达100的马达转子传感器(未示出)检测到的马达的电角度等,以脉宽调制方式切换第一逆变器10的第一开关元件s11-s16和第二逆变器20的第二开关元件s21-s26,从而驱动马达100。尤其,当控制器30以脉宽调制方式控制第一开关元件s11-s16和第二逆变器20的第二开关元件s21-s26时,可以应用空间向量脉宽调制(space vector pulse width modulation,svpwm)方式。
87.为了有助于更加清楚地理解具有如上所述的结构的根据本发明的一个实施例的马达驱动装置,首先对通常的开口端绕组方式马达驱动装置的控制方法进行说明。
88.图2是详细示出用于通过开口端绕组方式来控制马达的通常的控制器的结构框图,图3是用于说明应用于图2所示的通常的控制器中的马达控制方法的电压向量图。另外,图4是示出当通过图2所示的通常的控制器来控制马达时产生的每个逆变器的电压输出的波形图,图5是更详细地示出图2所示的通常的控制器内的空间向量调制部的结构框图。
89.如图2所示,现有的马达驱动装置的控制器可以包括电流指令映射(current command map)41、电流控制部42、第一占空比产生部43以及第二占空比产生部44。
90.电流指令映射41可以基于通过驾驶员的操作等产生的马达所需功率(马达所需扭矩t
e*
)和马达的反电动势λ-1
来产生与其对应的电流指令i
d*
、i
q*
。电流指令映射41产生反映马达所需功率的马达的电流指令,在图2的示例中示出了基于马达所需功率和反电动势的电流指令映射,然而,可以应用基于其他因素产生马达的电流指令的电流指令映射。
91.电流控制部42可以接收电流指令i
d*
、i
q*
,并与检测到的实际提供到马达的电流的值进行比较,从而产生可减少其差异的电压指令v
d*
、v
q*
以及v
n*
。电压指令可以包括d轴分量v
d*
、q轴分量v
q*
以及0相(zero phase)分量v
n*
。
92.第一占空比产生部43为用于产生图1所示的第一逆变器10内的开关元件的占空比的组件,其可以包括:乘法部431,通过将电压指令v
d*
、v
q*
以及v
n*
变为1/2倍,产生用于应用在第一逆变器10的第一逆变器电压指令v
d1*
、v
q1*
以及v
n1*
;坐标转换部432,将第一逆变器电压指令v
d1*
、v
q1*
以及v
n1*
转换为对应于马达的每个相的第一逆变器相电压指令v
as1*
、v
bs1*
以及v
cs1*
;以及第一空间向量脉宽调制部433,基于第一逆变器相电压指令v
as1
*、v
bs1*
以及v
cs1*
和第一逆变器电压指令中的0相分量v
n1*
来执行空间向量脉宽调制,以产生第一逆变器10内的开关元件的占空比。
93.与第一占空比产生部43相似地,第二占空比产生部44为用于产生图1所示的第二
逆变器20内的开关元件的占空比的组件,其可以包括:乘法部441,通过将电压指令v
d*
、v
q*
以及v
n*
变为-1/2倍,产生用于应用在第二逆变器20的第二逆变器电压指令v
d2*
、v
q2*
以及v
n2*
;坐标转换部442,将第二逆变器电压指令v
d2*
、v
q2*
以及v
n2*
转换为对应于马达的每个相的第二逆变器相电压指令v
as2*
、v
bs2*
以及v
cs2*
;以及第二空间向量脉宽调制部443,基于第二逆变器相电压指令v
as2*
、v
bs2*
以及v
cs2*
和第二逆变器电压指令中的0相分量v
n2*
来执行空间向量脉宽调制,以产生第二逆变器20内的开关元件的占空比。
94.其中,根据坐标转换部432、442进行的坐标转换是将dq同步坐标转换为对应于三相的abc坐标,其属于在本技术领域通常被称为克拉克/派克逆变换(inverse clarke//park transformation)的公知技术。作为其相反转换的克拉克/派克变换(clarke//park transformation)同样属于本技术领域的公知技术,因此将省略对此的单独的详细说明。
95.如图2所示,通常的开口端绕组方式马达控制方法通过将马达的电压指令相同地分配给第一逆变器和第二逆变器的方式来实现。
96.即,如图3所示,在开口端绕组结构的马达控制中,在合成对第一逆变器的切换向量图和对第二逆变器的切换向量图的向量图上示出的马达电压v
mot
可以被表示为,根据第一逆变器的电压v
inv1
和与根据第一逆变器的电压v
inv1
大小相同且方向相反的根据第二逆变器的电压v
inv2
之差的形式。每个向量图被示出在dq平面上,dq平面和用于空间向量脉宽调制的向量图等为本技术领域的公知技术,因此将省略对此的单独的详细说明。
97.如上所述,当通过空间向量脉宽调制来实现具有相同大小和相反方向的第一逆变器电压和第二逆变器电压时,可以获得如图4所示的逆变器输出电压波形。在图4中,t
sw
为逆变器内的开关元件的切换周期,v
a1
、v
b1
、v
c1
以及v
n1
表示第一逆变器的各相电压和0相分量电压,v
a2
、v
b2
、v
c2
以及v
n2
表示第二逆变器的各相电压和0相分量电压,vn表示第一逆变器的0相分量电压和第二逆变器的0相分量电压之差,即表示根据第一逆变器和第二逆变器来施加到马达的0相分量电压。
98.如图4所示,尽管第一逆变器电压和第二逆变器电压在dq平面上的电压大小相同,但由于相位不同而具有不同的0相分量电压。因此,施加到马达的0相分量电压vn的大小无法在周期上平均地保持为0。
99.如图5所示,图2所示的通常的控制器内的空间向量调制部433或443可以包括偏移电压产生部51、极电压指令产生部52、极电压指令限制部53、除法部54以及加法部55。
100.偏移电压产生部51基于三相电压指令v
as*
、v
bs*
以及v
cs*
来产生电压指令v
ns*
,极电压指令产生部52从三相电压指令v
as*
、v
bs*
以及v
cs*
减去在该偏移电压指令v
ns*
减去0相分量电压v
n*
的值,从而产生极电压指令v
an*
、v
bn*
以及v
cn*
。
101.如上所述,在进行通常的开口端绕组方式的马达控制时,基于三相电压指令v
as*
、v
bs*
以及v
cs*
来产生偏移电压指令v
ns*
,因此,在实际上通过两个逆变器驱动马达时,将会与从每个逆变器输出的偏移电压具有差异。尤其,由于第一逆变器和第二逆变器产生不同的偏移电压指令v
ns*
,因此,实际上在每个逆变器中不会输出对应于偏移电压指令的偏移电压。
102.将其表示为如下的数学式1。
103.[数学式1]
[0104]vns1
=v
n1*-v
ns1*
=0.5v
n*-v
ns1*
[0105]vns2
=v
n2*-v
ns2*
=-0.5v
n*-v
ns2*
[0106]
因此,最终施加到马达的0相分量电压变为下述数学式2,从而无法按照期望来控制0相分量电压。
[0107]
[数学式2]
[0108]vns1-v
ns2
=v
n*-v
ns1*
v
ns2*
[0109]
如上所述,当0相分量电压无法在周期上被平均地控制为0时,会产生马达的共模电流,并且由于共模电流的流动而可能会导致在马达产生的损失增加,在严重的情况下,还可能会发生马达的烧毁。
[0110]
在图5中,极电压指令限制部53可以将极电压指令限制在施加到第一逆变器和第二逆变器的直流电压v
dc
的
±
0.5的范围,除法部54可以将限制的极电压指令除以施加到第一逆变器和第二逆变器的直流电压v
dc
,加法部55可以通过在除法部54的结果上分别加上0.5来确定逆变器内的开关元件的占空比da、db以及dc。
[0111]
极电压指令限制部53、除法部54以及加法部55对应于用于实现脉宽调制控制的公知技术,本领域技术人员可充分地执行详细地操作,因此将省略对其的单独的详细说明。
[0112]
图6是详细示出应用于根据本发明的一个实施例的马达驱动装置的控制器的结构框图。
[0113]
参照图6,应用于根据本发明的一个实施例的马达驱动装置的控制器30可以包括电流指令映射61、电流控制部62、第一占空比产生部63以及第二占空比产生部64。
[0114]
电流指令映射61可以基于通过驾驶员的操作等产生的马达所需功率(马达所需扭矩t
e*
)和马达的反电动势λ-1
来产生与其对应的电流指令i
d*
、i
q*
。
[0115]
电流控制部62可以接收电流指令i
d*
、i
q*
,并与检测到的实际提供到马达的电流的值进行比较,从而产生可减少其差异的电压指令v
d*
、v
q*
以及v
n*
。电压指令可以包括d轴分量v
d*
、q轴分量v
q*
以及0相(zero phase)分量v
n*
。
[0116]
电流指令映射61和电流控制部62可以与应用于图2所示的通常的马达控制方法的电流指令映射和控制部实质上相同。
[0117]
第一占空比产生部63为用于产生第一逆变器10内的开关元件的占空比的组件,其可以包括:乘法部631,通过将电压指令v
d*
、v
q*
以及v
n*
变为1/2倍,产生用于应用在第一逆变器10的第一逆变器电压指令v
d1*
、v
q1*
以及v
n1*
;坐标转换部632,将第一逆变器电压指令v
d1*
、v
q1*
以及v
n1*
转换为对应于马达的每个相的第一逆变器相电压指令v
as1*
、v
bs1*
以及v
cs1*
;以及第一空间向量脉宽调制部633,通过基于第一逆变器相电压指令v
as1*
、v
bs1*
以及v
cs1*
产生的第一偏移电压指令v
ns1*
、第一逆变器电压指令中的0相分量v
n1*
以及在第二占空比产生部64产生的第二偏移电压指令v
ns2*
来执行空间向量脉宽调制,以产生第一逆变器10内的开关元件的占空比d
a1
、d
b1
以及d
c1
。
[0118]
与第一占空比产生部63相似地,第二占空比产生部64为用于产生第二逆变器20内的开关元件的占空比的组件,其可以包括:乘法部641,通过将电压指令v
d*
、v
q*
以及v
n*
变为-1/2倍,产生用于应用在第二逆变器20的第二逆变器电压指令v
d2*
、v
q2*
以及v
n2*
;坐标转换部642,将第二逆变器电压指令v
d2*
、v
q2*
以及v
n2*
转换为对应于马达的每个相的第二逆变器相电压指令v
as2*
、v
bs2*
以及v
cs2*
;以及第二空间向量脉宽调制部643,通过基于第二逆变器相电压指令v
as2*
、v
bs2*
以及v
cs2*
产生的第二偏移电压指令v
ns2*
、第二逆变器电压指令中的0相分
量v
n2*
以及在第一占空比产生部63产生的第一偏移电压指令v
ns1*
来执行空间向量脉宽调制,以产生第二逆变器20内的开关元件的占空比d
a2
、d
b2
以及d
c2
。
[0119]
在本发明的一个实施例中,第一占空比产生部63和第二占空比产生部64的特征在于,彼此共享分别根据第一逆变器10和第二逆变器20的输出电压来确定的各自的偏移电压指令,以使两个逆变器具有相同的0相分量电压。即,用于控制第一逆变器10的第一占空比产生部63可以在利用对应于第一逆变器10输出电压的第一逆变器相电压指令v
as1*
、v
bs1*
以及v
cs1*
来产生第一偏移电压指令v
ns1*
后,将其提供到第二占空比产生部64,用于控制第二逆变器20的第二占空比产生部64可以在利用对应于第二逆变器20输出电压的第二逆变器相电压指令v
as2*
、v
bs2*
以及v
cs2*
来产生第二偏移电压指令v
ns2*
后,将其提供到第一占空比产生部63。
[0120]
第一占空比产生部63和第二占空比产生部64可以通过彼此合成第一偏移电压指令v
ns1*
和第二偏移电压指令v
ns2*
来产生具有彼此相同的值的合成偏移电压指令,并通过将合成偏移电压指令和各逆变器的0相分量电压指令v
n1*
、v
n2*
应用于每个逆变器的相电压指令来产生对每个逆变器的极电压指令。
[0121]
图7是更详细地示出应用于图6所示的根据本发明的一个实施例的马达驱动装置的控制器内的空间向量调制部的结构框图。尤其,图7详细地示出了第一占空比产生部63内的第一空间向量脉宽调制部643,虽未单独示出,但第二占空比产生部64内的第二空间向量脉宽调制部644也可以被实现为具有彼此对应的结构。
[0122]
参照图7,第一占空比产生部63内的第一空间向量脉宽调制部634可以包括偏移电压产生部71、偏移电压指令合成部711、极电压指令产生部72、极电压指令限制部73、除法部74以及加法部75。
[0123]
偏移电压产生部71可以基于第一逆变器的三相电压指令v
as1*
、v
bs1*
以及v
cs1*
来产生偏移电压指令v
ns1*
。
[0124]
在图7所示的示例中,偏移电压产生部71被示出为通过三相电压指令v
as1*
、v
bs1*
以及v
cs1*
中的最大值和最小值的平均值来计算第一逆变器10的偏移电压指令v
ns1*
,但这仅对应于简单的示例,可以通过本技术领域已知的各种方法来确定偏移电压指令。
[0125]
偏移电压指令合成部711可以通过彼此合成在偏移电压产生部71产生的第一逆变器10的偏移电压指令v
ns1*
和根据第二占空比产生部64内的第二空间向量脉宽调制部644来产生的第二逆变器20的偏移电压指令v
ns2*
来产生合成偏移电压指令v
ns,f*
。
[0126]
偏移电压指令合成部711可以根据各种方法来产生合成偏移电压指令v
ns,f*
。例如,偏移电压指令合成部711可以在第一逆变器10的偏移电压指令v
ns1*
和第二逆变器的偏移电压指令v
ns2*
分别应用加权值后,通过合计来产生合成偏移电压指令v
ns,f*
。另外,偏移电压指令合成部711可以通过第一逆变器10的偏移电压指令v
ns1*
和第二逆变器20的偏移电压指令v
ns2*
的平均值来确定偏移电压指令v
ns,f*
。
[0127]
不管偏移电压指令合成部711通过哪一种方法来产生合成偏移电压指令v
ns,f*
,分别在第一空间向量脉宽调制部634和第二空间向量脉宽调制部644产生的合成偏移电压指令v
ns,f*
应被实现为具有彼此相同的值。
[0128]
当通过偏移电压指令合成部711将第一逆变器10的偏移电压指令v
ns1*
和第二逆变器20的偏移电压指令v
ns2*
的平均值确定为合成偏移电压指令时,从每个逆变器输出的0相
分量电压如下数学式3。
[0129]
[数学式3]
[0130]vns1
=v
n1*-v
ns,f*
=0.5v
n*-0.5*(v
ns1*
v
ns2*
)
[0131]vns2
=v
n2*-v
ns,f*
=-0.5v
n*-0.5*(v
ns1*
v
ns2*
)
[0132]
根据数学式3,两个逆变器的0相分量电压的差(v
ns1-v
ns2
)可以被输出为在电流控制部62设置的0相分量电压指令v
n*
。其中,当通过两个偏移电压指令v
ns1*
、v
ns2*
的平均来确定最终应用在两个逆变器的调制的合成偏移电压指令v
ns,f*
时,两个逆变器所具有的输出占空比的裕度(output duty margin)将会相同,因此,优选地,通过两个偏移电压指令v
ns1*
、v
ns2*
的平均来确定合成偏移电压指令v
ns,f*
。
[0133]
在图7中,极电压指令产生部72可以从三相电压指令v
as*
、v
bs*
以及v
cs*
分别减去在合成偏移电压指令v
ns,f*
减去第一逆变器10的电压指令中的0相分量电压指令v
n1*
的值,从而产生第一逆变器10的极电压指令v
an1*
、v
bn1*
以及v
cn1*
。
[0134]
在图7中,极电压指令限制部73可以将极电压指令限制在施加到第一逆变器和第二逆变器的直流电压v
dc
的
±
0.5的范围,除法部74可以将限制的极电压指令除以施加到第一逆变器和第二逆变器的直流电压v
dc
,加法部75可以通过在除法部74的结果上分别加上0.5来确定逆变器内的开关元件的占空比da、db以及dc。
[0135]
极电压指令限制部73、除法部74以及加法部75对应于用于实现脉宽调制控制的公知技术,本领域技术人员可充分地执行详细地操作,因此将省略对其的单独的详细说明。
[0136]
另外,图7虽然示出了第一占空比产生部63内的空间向量脉宽调制部633的详细结构,但对于本领域普通技术人员而言,可以通过图7容易地获得第二占空比产生部64内的空间向量脉宽调制部643的详细结构。因此,将省略对第二占空比产生部64内的空间向量脉宽调制部643的单独说明。
[0137]
图8是示出通过根据本发明的一个实施例的马达驱动装置的控制来产生的每个逆变器的电压输出的波形图。
[0138]
参照图8,当与图4所示的通常的马达驱动装置的波形进行比较时,通过根据本发明的一个实施例的马达驱动装置,可以确认到马达的0相分量电压vn被确定为在一个周期内具有0的平均值。
[0139]
因此,根据本发明的一个实施例的马达驱动装置可以执行所期望的控制,使得不会发生空间向量脉宽调制导致的0相分量电压的失真,由此,可以抑制在马达产生的共模电流,从而抑制马达的不必要的损失,并防止马达的烧毁。
[0140]
在以上说明的在图6至图8所示的本发明的实施例是将切换周期内的0相分量电压的平均控制为0的实施例。这种实施例虽然可以在周期上平均地将0相分量电压控制为0,但是由于0相分量电压的瞬时脉动,可能会产生共模电流,瞬时共模电流同样可以导致马达的损失。以下,对可通过抑制0相分量电压的脉动来消除瞬时共模电流的本发明的另一实施例进行说明。
[0141]
图9是详细示出应用于根据本发明的另一实施例的马达驱动装置的控制器的结构框图。
[0142]
参照图9,应用于根据本发明的另一实施例的马达驱动装置的控制器30可以包括电流指令映射81、电流控制部82、第一占空比产生部83以及第二占空比产生部84。
[0143]
电流指令映射81可以基于通过驾驶员的操作等产生的马达所需功率(马达所需扭矩t
e*
)和马达的反电动势λ-1
来产生与其对应的电流指令i
d*
、i
q*
。
[0144]
电流控制部82可以接收电流指令i
d*
、i
q*
,并与检测到的实际提供到马达的电流的值进行比较,从而产生可减少其差异的电压指令v
d*
、v
q*
以及v
n*
。电压指令可以包括d轴分量v
d*
、q轴分量v
q*
以及0相(zero phase)分量v
n*
。
[0145]
电流指令映射81和电流控制部82可以与应用于图2所示的通常的马达控制方法的电流指令映射和控制部实质上相同。
[0146]
第一占空比产生部83为用于产生第一逆变器10内的开关元件的占空比的组件,其可以包括:第一乘法部831,通过将电压指令v
d*
、v
q*
以及v
n*
中的d轴电压指令v
d*
和q轴电压指令v
q*
变为倍,产生用于应用在第一逆变器10的第一逆变器d轴电压指令v
d1*
和第一逆变器q轴电压指令v
q1*
;第二乘法部832,通过将电压指令v
d*
、v
q*
以及v
n*
中的0相分量电压指令变为p1倍,产生第一逆变器0相分量电压指令v
n1*
;坐标转换部833,将第一逆变器电压指令v
d1*
、v
q1*
以及v
n1*
转换为对应于马达的每个相的第一逆变器相电压指令v
as1*
、v
bs1*
以及v
cs1*
,并且转换为使得比马达的旋转角θ领先或落后30度;以及第一空间向量脉宽调制部834,基于第一逆变器相电压指令v
as1*
、v
bs1*
以及v
cs1*
执行空间向量脉宽调制,以产生第一逆变器10内的开关元件的占空比d
a1
、d
b1
以及d
c1
。
[0147]
第二占空比产生部84为用于产生第二逆变器20内的开关元件的占空比的组件,其可以包括:第三乘法部841,通过将电压指令v
d*
、v
q*
以及v
n*
中的d轴电压指令v
d*
和q轴电压指令v
q*
变为倍,产生用于应用在第二逆变器20的第二逆变器d轴电压指令v
d2*
和第二逆变器q轴电压指令v
q2*
;第四乘法部842,通过将电压指令v
d*
、v
q*
以及v
n*
中的0相分量电压指令变为-p2倍(其中,p1 p2=1),产生第二逆变器0相分量电压指令v
n2*
;坐标转换部843,将第二逆变器电压指令v
d2*
、v
q2*
以及v
n2*
转换为对应于马达的每个相的第二逆变器相电压指令v
as2*
、v
bs2*
以及v
cs2*
,并且转换为使得比马达的旋转角θ领先或落后150度;以及第二空间向量脉宽调制部844,基于第二逆变器相电压指令v
as2*
、v
bs2*
以及v
cs2*
执行空间向量脉宽调制,以产生第二逆变器20内的开关元件的占空比d
a2
、d
b2
以及d
c2
。
[0148]
其中,本技术领域已知,马达的旋转角θ可以通过设置在马达的旋转角传感器(未示出)来获得。
[0149]
在本发明的一个实施例中,第一占空比产生部83和第二占空比产生部84的特征在于,在将d轴电压指令和q轴电压指令转换为三相电压指令的过程中,将坐标转换执行为彼此相差120度。
[0150]
图10是用于说明在图9所示的本发明的实施例中将第一逆变器的相电压指令转换为使得比马达的旋转角领先30度,并且将第二逆变器的相电压指令转换为使得比马达的旋转角领先150度的示例的电压向量图,图11是用于说明在图9所示的本发明的实施例中将第一逆变器的相电压指令转换为使得比马达的旋转角落后30度,并且将第二逆变器的相电压指令转换为使得比马达的旋转角落后150度的示例的电压向量图。
[0151]
如图10所示,马达电压v
mot
可以被表示为第一逆变器的电压v
inv1
和第二逆变器的电压v
inv2
之差。更详细地,当第一逆变器的电压v
inv1
比马达电压v
mot
领先30度,并且具有马达电压的倍的大小,第二逆变器的电压v
inv2
比马达电压v
mot
领先150度,并且具有马达电
压的倍的大小时,可以确认到第一逆变器电压和第二逆变器电压之差被表示为马达电压。
[0152]
与其相似地,如图11所示,当第一逆变器的电压v
inv1
比马达电压v
mot
落后30度,并且具有马达电压的倍的大小,第二逆变器的电压v
inv2
比马达电压v
mot
落后150度,并且具有马达电压的倍的大小时,可以确认到第一逆变器电压和第二逆变器电压之差被表示为马达电压。
[0153]
图12是示出通过图9所示的根据本发明的实施例的马达驱动装置的控制来产生的每个逆变器的电压输出、0相电压分量以及共模电流的波形图。
[0154]
如图12所示,当两个逆变器输出的电压向量具有120度的差时,在执行利用两个电压向量的调制的情况下,可以确认到瞬时地表示出相同的0相分量电压v
n1
、v
n2
。因此,两个逆变器的0相分量电压之差vn瞬时成为0,由此,可以确认到根据0相分量电压之差的0相分量电流纹波(共模电流)也成为了0。
[0155]
另一方面,在本发明的一个实施例中,还可以不同地分配对每个逆变器的0相分量电压指令v
n*
。即,在图9中,通过第二乘法部832和第四乘法部842来设置的对第一逆变器的倍数值p1和对第二逆变器的倍数值p2可以被确定为不同的大小。其中,两个倍数值的大小之和应为1(p1 p2=1)。
[0156]
0相分量电压指令v
n*
的分配不会影响到马达输出,因此对于马达来说是相同的。
[0157]
例如,将0相分量电压大小分配为相同的大小时(p1和p2的大小相同时),由于切换死区时间(switching dead time)等存在于逆变器的误差和对其的补偿而导致两个逆变器的最终输出占空比不同,因此,可能会发生其中一个逆变器的占空比首先被限制的情况。
[0158]
另一方面,当对两个逆变器赋予对0相分量电压指令的分配的自由度时,可以提供一种能够将由于死区时间等存在于逆变器的误差而导致不同的占空比的最大值调整为相同的方法,由此,可以增加马达的输出。即,可通过调谐(tuning)倍数值p1、p2,适当地改善由于逆变器自身必然所具有的误差而导致的问题,由此,可以提高马达输出。
[0159]
如上所述,通过图9至图12来说明的本发明的一个实施例将两个逆变器的电压向量的相位设置为相差120度,从而产生相同的因两个逆变器的空间向量脉宽调制(space vector pulse width modulation,svpwm)而导致的0相分量输出电压,由此,可以消除两个逆变器之间的0相分量切换脉动。
[0160]
然而,这种实施例采用的方法为,在马达驱动系统的所有电压指令v
dqn*
中分离用于驱动各自的逆变器的电压之后,执行用于以空间向量脉宽调制方式驱动各自的逆变器的运算。这种方法需要用于坐标转换、大小限制等的较多运算,并且可能会由于余弦、正弦运算等的离散误差而导致逆变器的输出电压具有误差。
[0161]
对此,本发明提供一种可以通过更简单的运算来解决由于0相分量电压而导致的切换脉动的又一实施例。
[0162]
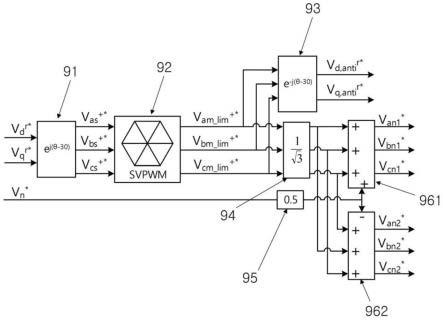
图13是详细示出应用于根据本发明的又一实施例的马达驱动装置的控制器的结构框图,图14是更详细地示出图13所示的空间向量脉宽调制部的结构框图。
[0163]
参照图13和图14,根据本发明的又一实施例的马达驱动装置的控制器30可以包括坐标转换部91、空间向量脉宽调制部92、乘法部94、第一极电压指令产生部961以及第二极
电压指令产生部962。在图13示出的示例中,控制器显然可以包括图9所示的实施例所包括的电流指令映射81和电流控制部82。即,在图13的实施例中,坐标转换部91可以接收在图9所示的实施例的电流控制部82中产生的马达的电压指令(同步坐标系的dq电压指令)v
dr*
、v
qr*
,并进行操作。
[0164]
坐标转换部91可以接收在电流控制部中产生的马达的电压指令v
dr*
、v
qr*
,并将其转换为比马达的旋转角θ落后30度,从而产生比马达的旋转角θ落后30度的相电压指令v
as *
、v
bs *
以及v
cs *
。通过坐标转换部91来实现的坐标转换可以通过应用作为公知技术的克拉克/派克逆变换(inverse clarke//park transformation)来实现。
[0165]
空间向量脉宽调制部92可以接收从坐标转换部91输出的比马达的旋转角θ落后30度的相电压指令v
as *
、v
bs *
以及v
cs *
,并基于此执行空间向量脉宽调制,从而产生比马达的旋转角θ落后30度的被限制的极电压指令v
am_lim *
、v
bm_lim *
以及v
cm_lim *
。
[0166]
更具体地,空间向量脉宽调制部92可以包括:偏移电压产生部921,产生对应于在比马达的旋转角θ落后30度的相电压指令v
as *
、v
bs *
以及v
cs *
中的最大值和最小值的平均的偏移电压;极电压产生部922,从比马达的旋转角θ落后30度的相电压指令v
as *
、v
bs *
以及v
cs *
中减去偏移电压,以产生比马达的旋转角θ落后30度的极电压指令v
am *
、v
bm *
以及v
cm *
;以及极电压指令限制部923,限制从极电压指令产生部922产生的比马达的旋转角θ落后30度的极电压指令v
am *
、v
bm *
以及v
cm *
的大小,以产生比马达的旋转角θ落后30度的被限制的极电压指令v
am_lim *
、v
bm_lim *
以及v
cm_lim *
。
[0167]
已知,当切换控制分别连接到马达的线圈两端的两个逆变器,并以开口端绕组方式驱动马达时,相比彼此连接马达的线圈的一端,并且在另一端对逆变器进行切换控制的封闭端绕组方式的马达驱动可以获得倍的输出。因此,在图13和图14的实施例中,极电压指令限制部923可以通过的大小来限制上下限,而不是通过逆变器的直流端电压v
dc
来限制极电压指令的上下限。即,在极电压指令限制部923中设置的上限值可以是下限值可以是
[0168]
另一方面,当在极电压限制部923中将上限值设置为将下限值设置为时,在后端增加或减去0相分量电压指令v
n*
的0.5倍的裕度(margin)可能会不足。因此,当将虚拟的极电压指令的限制改变为时(其中,amp为表示大小的运算子),可使电压限制减小增加到后端的0相分量电压指令v
n*
程度的大小,以确保之后增加的对0相分量电压指令v
n*
的裕度。
[0169]
如图10所示,第一逆变器10的输出值和第二逆变器20的输出值具有大小,因此,乘法部94可以进行在比马达的旋转角θ落后30度的被限制的极电压指令v
am_lim *
、v
bm_lim *
以及v
cm_lim *
乘以的运算。
[0170]
第一极电压指令产生部961可以在乘法部94输出的值分别加上0相分量电压指令v
n*
的0.5倍,以最终产生对第一逆变器10的极电压指令。
[0171]
第二极电压指令产生部962可以产生对第二逆变器20的极电压指令。当第一逆变器10的电压比马达电压落后30度时,第二逆变器20的电压指令将比第一逆变器的电压落后
120度。这对应于将第一极电压指令中的a相指令位移(shifting)到b相指令,将第一极电压指令中的b相指令位移到c相指令,将第一极电压指令中的c相指令位移到a相指令。
[0172]
即,第二极电压指令产生部962可以从乘法部94输出的值分别减去0相分量电压指令v
n*
的0.5倍,并且可以将从乘法部94输出的值中对应于a相的值减去0相分量电压指令v
n*
的1/2的值确定为第二逆变器20的b相极电压指令,将从乘法部94输出的值中对应于b相的值减去0相分量电压指令v
n*
的1/2的值确定为第二逆变器20的c相极电压指令,将从乘法部94输出的值中对应于c相的值减去0相分量电压指令v
n*
的1/2的值确定为第二逆变器20的a相极电压指令。
[0173]
当基于分别从第一极电压指令产生部961和第二极电压指令产生部962输出的极电压指令来产生占空比以对第一逆变器10内的开关元件和第二逆变器20内的开关元件进行切换控制时,如图9所示的实施例,可以通过使第一逆变器的电压比马达电压指令落后30度,第二逆变器的电压和第一逆变器的电压具有120度的相位差来消除0相分量电流。
[0174]
尤其,在图13和图14所示的实施例中,由于基于马达的电压指令,在首先执行空间向量脉宽调制之后,基于输出的结构来产生对每个逆变器的极电压指令,因此,相比图9所示的实施例,可以最小化用于坐标转换的运算量,由此,可以最小化在电压调制运算中由于余弦、正弦运算而导致的离散误差。
[0175]
另一方面,图13和图14虽然应用了用于对0相分量电压指令v
n*
乘以0.5倍的乘法部95,但如图15所示,也可以对每个逆变器分配不同的0相分量电压指令v
n*
。
[0176]
图15是示出对图13所示的实施例的控制器的变形例的结构框图。
[0177]
参照图15,可以将在第一极电压指令产生部961合计的对0相分量电压指令的倍数值p1和在第二极电压指令产生部962合计的对0相分量电压指令的倍数值p2的大小确定为不同。其中,两个倍数值的大小之和应为1(p1 p2=1)。
[0178]
如对图9的实施例的描述,0相分量电压指令v
n*
的分配不会影响到马达输出,因此对于马达来说是相同的。当对两个逆变器赋予对0相分量电压指令的分配的自由度时,可以提供一种能够将由于死区时间等存在于逆变器的误差而导致不同的占空比的最大值调整为相同的方法,由此,可以增加马达的输出。
[0179]
即,图15所示的实施例可通过调谐(tuning)倍数值p1、p2,适当地改善由于逆变器自身必然所具有的误差而导致的问题,由此,可以提高马达输出。
[0180]
另一方面,图13至图15中的附图标记93是用于产生反馈到积分控制器(对应于图9的电流控制器82)的信号的抗饱和运算部。
[0181]
在图13至图15所示的实施例中,通过空间向量脉宽调制部92内的极电压指令限制部923来限制对应于电流控制器82的输出的马达的电压指令v
dr*
、v
qr*
,之后,通过被限制的指令来实现对每个逆变器的切换控制。即,电流控制器82为了执行准确的反馈控制,需要接受当自身输出的电压指令应用在实际逆变器控制时的限制程度。
[0182]
抗饱和运算部93可以对比马达的旋转角θ落后30度的被限制的极电压指令v
am_lim *
、v
bm_lim *
以及v
cm_lim *
进行比马达的旋转角θ落后30度的克拉克/派克变换(clarke//park transformation),并反馈到电流控制器。
[0183]
进一步地,在本发明的又一实施例中,第一逆变器10的电压也可以比马达的电压指令领先30度。在这种情况下,第二逆变器20的电压可以比第一逆变器10的电压指令领先
120度。因此,第二极电压指令产生部962可以在乘法部94输出的值分别加上0相分量电压指令v
n*
的0.5倍,并且可以将从乘法部94输出的值中对应于a相的值加上0相分量电压指令v
n*
的1/2的值确定为第二逆变器20的c相极电压指令,将从乘法部94输出的值中对应于b相的值加上0相分量电压指令v
n*
的1/2的值确定为第二逆变器20的a相极电压指令,将从乘法部94输出的值中对应于c相的值加上0相分量电压指令v
n*
的1/2的值确定为第二逆变器20的b相极电压指令。
[0184]
如上所述的第一逆变器和第二逆变器的电压相位关系示出在图10中。图10虽然示出第一逆变器的电压比马达电压领先30度的情况的示例,但对于本领域普通技术人员而言,可以通过图10的示例充分地获得并实施第一逆变器的电压比马达电压落后30度的实施例。
[0185]
以上对本发明的特定实施例进行了示出和说明,然而,本发明可以在权利要求的范围内进行各种改进和变更,这对于本领域普通技术人员而言是显而易见的。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。