技术特征:
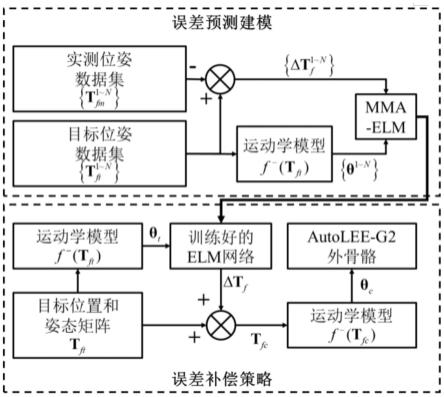
1.一种机器人运动误差补偿方法,其特征在于,包括如下步骤:步骤一、利用采集的误差数据集来训练机器人运动误差预测模型;步骤二、利用训练好的运动误差预测模型来纠正机器人运动规划输出。2.根据权利要求1所述的一种机器人运动误差补偿方法,其特征在于,步骤一中所述的误差数据集包含了位姿误差数据集和驱动关节目标角度位置数据集其中,n为数据集中包含样本的数量。3.根据权利要求1所述的一种机器人运动误差补偿方法,其特征在于,所述的位姿误差数据集获得方式为:一、在机器人执行末端的可达工作空间内,随机筛选出n个目标点位,组成目标位姿数据集二、控制机器人执行末端到达这些点位,并利用外部测量设备实测出各个点位的位姿,这些实测值则组成实测位姿数据集三、机器人执行末端在这些点位的实测位姿与目标位姿之间的差值是机器人的运动误差,它们组成位姿误差数据集用来作为训练运动误差预测模型的标签集。4.根据权利要求1所述的一种机器人运动误差补偿方法,其特征在于,所述的驱动关节目标角度位置数据集获得方式为:将目标位姿数据集输入到机器人的理想逆运动学模型f-(t
ft
)中求得5.根据权利要求1所述的一种机器人运动误差补偿方法,其特征在于,步骤一中所述的运动误差预测模型为:elm网络模型,elm网络模型的训练方法采用新型元启发式优化算法,即改进型蜉蝣算法mma;将mma训练的elm网络模型简称为mma-elm模型。6.根据权利要求5所述的一种机器人运动误差补偿方法,其特征在于,所述改进型蜉蝣算法mma采用改进型tent混沌映射与反向学习理论对原始蜉蝣算法的初始化策略进行了改进,以改善蜉蝣算法的初始条件与收敛速度;改进型tent混沌映射表达式为:式中,z
i
代表混沌变量值,a4∈(0,1)是一个常数,由于tent映射生成出来的数值不一定在蜉蝣种群位置的限定范围内,因而还需要将其载波到设定的位置解空间,如下式所示:x
mi
=x
min
(x
max-x
min
)z
i
;通过tent映射生成的种群位置的反向位置可以由下式获得:
同时,采用了柯西变异理论对蜉蝣算法的位置更新策略进行了改进,以降低算法陷入局部最优陷阱的概率。7.根据权利要求5所述的一种机器人运动误差补偿方法,其特征在于,所述的步骤二的具体过程为:一、在工作空间内规划了一个新的机器人执行末端目标点位,该点位的位姿矩阵为t
ft
,将其输入逆运动学模型f-(t
ft
)后即可获得机器人驱动关节目标角度位置θ
t
;该θ
t
不直接用于驱动机器人,而是通过训练好的elm网络预估出此指令下的机器人执行末端位姿误差δt
f
;二、将原有目标位姿t
ft
与预估位姿误差δt
f
相加后获得新的目标位姿t
fc
=t
ft
δt
f
;三、将t
fc
输入到逆运动学模型f-(t
fc
)中可获得补偿后的驱动关节角度位置θ
c
,θ
c
为用来驱动机器人的最终角度指令值。
技术总结
本发明公开了一种机器人运动误差补偿方法,其特征在于,包括如下步骤:步骤一、利用采集的误差数据集来训练机器人运动误差预测模型;步骤二、利用训练好的运动误差预测模型来纠正机器人运动规划输出;所述的运动误差预测模型为:ELM网络模型,ELM网络模型的训练方法采用新型元启发式优化算法,即改进型蜉蝣算法MMA;将MMA训练的ELM网络模型简称为MMA-ELM模型。本发明所提出来的机器人运动误差补偿方法在机器人运动误差补偿时具有结构简单、预测精度高、性能稳定和训练速度快等优势。性能稳定和训练速度快等优势。性能稳定和训练速度快等优势。
技术研发人员:何勇 张俊 尹奎 吴新宇 吴小凯 杨之乐
受保护的技术使用者:中建三局第一建设安装有限公司
技术研发日:2022.11.07
技术公布日:2023/2/6
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。