1.本发明涉及一种超声防丢追踪器指向信息的校正方法,属于防丢追踪器技术领域。
背景技术:
2.2021年4月21日,苹果在2021春季新品发布会上推出了一款全新的防丢追踪器(airtag),不同于传统的蓝牙防丢追踪器,增加了近距离精确查找功能:苹果在airtag中内置了uwb模块,通过airtag中的uwb模块与手机中的uwb模块交互,实现测距,获得距离信息;而为了获得指向信息,苹果调用了手机的摄像头与传感器,利用局部视觉里程计算法与imu,配合uwb获得的距离信息,实现坐标点的估算,从而获得指向,实现了可视化的近距离查找。
3.相对于传统蓝牙防丢追踪器,例如:华为于2022年推出的haiweitag,就是一种经典的蓝牙防丢追踪器,其搭载的蓝牙模块与手机蓝牙配对后,能够根据蓝牙信号强弱判断距离远近,从而给出距离近/远的结果,然后利用蜂鸣器提示寻找。传统蓝牙防丢追踪器的缺点显而易见,并不能向用户提供一个可视化的方向及距离,用户无法判断防丢追踪器在何方,近距离查找能力差。
4.对于超声防丢追踪器(tag)而言,直接获得的指向信息是防丢追踪器相对麦克风组的角度,在防丢追踪器与手机的距离远大于防丢追踪器尺寸时,可以将该角度看做手机中心指向防丢追踪器的角度,而一旦拉进手机与防丢追踪器的距离后角度偏差就会越加明显,降低用户体验。
技术实现要素:
5.本发明的目的是提供一种超声防丢追踪器指向信息的校正方法,该校正方法解决了现有技术中使用超声测距测角获得的指向信息并非智能设备中心点指向防丢追踪器的角度,使防丢追踪器近距离使用时,指向不准,用户体验差的问题。
6.为达到上述目的,本发明采用的技术方案是:一种超声防丢追踪器指向信息的校正方法,所述方法包括以下步骤:
7.基于智能设备可视化界面,建立校正平面;
8.确定测角用的至少两个麦克风/至少两个扬声器;
9.于校正平面中确定其正投影点x、y
……
;
10.于校正平面中选择校正点o;
11.选择任意一投影点与o、tag围成三角形,建立基于该三角形的校正函数f,输出o-tag指向信息。
12.上述技术方案中进一步改进的方案如下:
13.1.上述方案中,选择可视化界面的中心点为校正点。
14.2.上述方案中,选择两个麦克风投影点x、y与防丢追踪器交互测角。
15.3.上述方案中,连接xy并做xy中点的垂线,将校正平面划分为四个象限区域a、b、c、d;
16.比对x-tag和y-tag距离,当x-tag距离值小于y-tag时,保留x所在侧区域a和b;
17.顺时针/逆时针转动智能设备,根据测角结果变化保留区域a;
18.确定o-tag位于区域a中。
19.4.上述方案中,选择最接近投影点x与o、tag围成三角形,校正函数
[0020][0021]
其中,α为ox与x-tag所围角,a为o-tag长度,b为x-tag长度,从o向x方向的可视化界面边线作垂线,该垂线与ox的夹角为θ。
[0022]
5.上述方案中,根据智能设备使用习惯以o点为圆心,定义不同角度输出结果的指向信息,将校正函数输出结果转化为指向信息数据。
[0023]
6.上述方案中,从o点向智能设备正前方边界作垂线,此垂线定义为0
°
位置,从o点向智能设备正后方边界作垂线,此垂线定义为180
°
位置。
[0024]
7.上述方案中,测角时,选择连线平行于可视化界面边界的两个麦克风/扬声器。
[0025]
由于上述技术方案的运用,本发明与现有技术相比具有下列优点:
[0026]
1、本发明一种超声防丢追踪器指向信息的校正方法,通过测角用的麦克风/扬声器,基于智能设备可视化界面,选择校正点,基于校正点、任一使用的麦克风/扬声器的正投影点和tag围成三角形,从而建立校正函数f,利用测距测角参数和智能设备参数、麦克风和扬声器在智能设备上的位置参数,将麦克风/扬声器相对tag的角度修正为校正点o指向tag的角度,以消除指向角度误差,提升用户体验。
[0027]
2、本发明一种超声防丢追踪器指向信息的校正方法,通过比对x-tag和y-tag距离及转动智能设备,从而确定tag相对智能设备所在区域,消除同角度下不同位置的可能性。
[0028]
3、本发明一种超声防丢追踪器指向信息的校正方法,选择连线平行于可视化界面边界的两个麦克风/扬声器,使得划分区域时,划分界线与智能设备可视化界面边界的关系为平行/垂直,从而有利于后续将角度转化为只能设备相对tag的指向信息,处理更为便捷。
附图说明
[0029]
附图1为本发明一种超声防丢追踪器指向信息的校正方法实施例1的示意图;
[0030]
附图2为本发明一种超声防丢追踪器指向信息的校正方法实施例2的示意图。
具体实施方式
[0031]
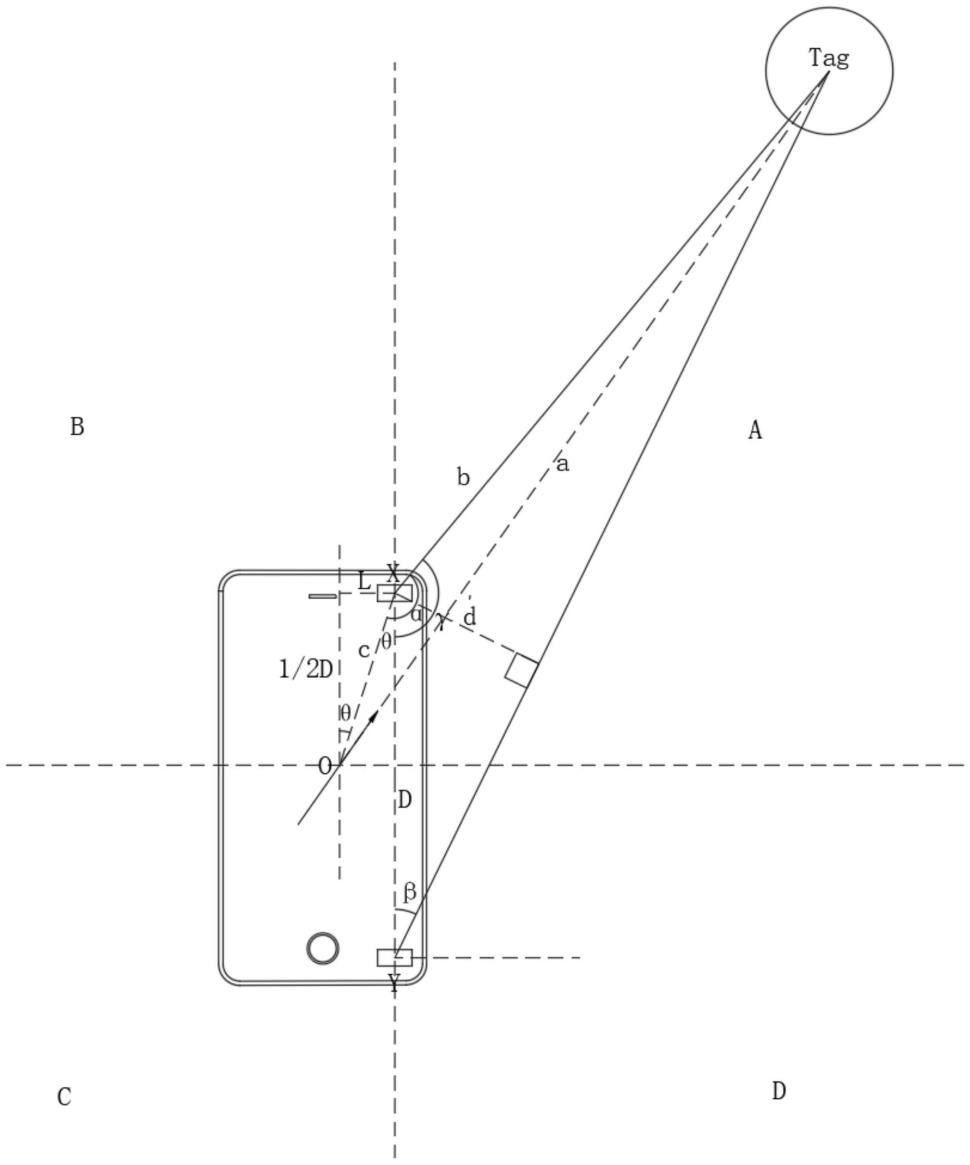
实施例1:一种超声防丢追踪器指向信息的校正方法,参照附图1,该校正方法的前提为智能设备与超声防丢追踪器交互获得角度数据β,获得至少一组距离数据b,这也是智能设备精确查找防丢追踪器所必须的数据,因此,在使用智能设备与防丢追踪器交互时,β和b为已知数据,可为校正算法直接导入,无法再次测角测距。
[0032]
在本方案的前置交互中,使用智能设备(手机)前端和后端的两个麦克风作为测角交互单元,可以发现,对于已经生产出的手机而言,手机可视化界面(显示屏)的尺寸是已知的,麦克风在手机中的相对位置也是已知的。
[0033]
校正方法包括以下步骤:
[0034]
基于手机的可视化界面,建立一个校正平面模型,将防丢追踪器tag正投影至此校正平面上,将三维模型二维简化,便于校正。
[0035]
通过测角算法确定所调用的两个麦克风,知晓麦克风信息后根据其在手机中的相对位置,将麦克风也正投影至校正平面中。
[0036]
在校正平面中确定麦克风对应的正投影点后,将其分别命名为x和y,同时选择好校正点o,这里,校正点o为可视化界面的中心点,对于常规的手机、平板、手表等设备而言,可视化界面的中心点也基本为设备整体的中心点,偏差值极小,可以忽略不计。
[0037]
选择点x与o点和tag点连线围成三角形,基于该三角形即可建立校正函数f,f的输出结果即为ox与o-tag的夹角,这里校正函数其中,α为ox与x-tag所围角,a为o-tag长度,b为x-tag长度,从o向x方向的可视化界面边线作垂线,该垂线与ox的夹角为θ。
[0038]
进一步地,详细阐述f建立的原理:参照附图1,根据测距测角结果,可以知道xy与y-tag的夹角为β,x-tag的长度为b,而根据手机参数的收集录入,可以知道xy长度为d,已知x、y、tag围成三角形的两边和一角,通过三角函数可以得到xy和x-tag所夹角度γ;
[0039]
图中,xy相对经过o点的水平线对称布置,因此,可以知道o到x所在水平线的距离为1/2d,且x到o点所在垂线的距离l也是可以通过手机尺寸和麦克风位置推导获得,因此ox长度c及夹角θ可以通过三角函数推导得到,而ox与xy的夹角也为θ;
[0040]
已知α=γ θ、b和c,再次利用三角函数可以得到o、x、tag所围三角形的所有数据,ox与o-tag的夹角也在其中;
[0041]
而获得的夹角为ox与o-tag的,通过 θ使其成为与手机指向的夹角。
[0042]
为了进一步方便用户能够直观的了解夹角,指定o为圆心,从o点向手机正前方边界作垂线,此垂线定义为0
°
位置,从o点向手机正后方边界作垂线,此垂线定义为180
°
位置,定义不同角度输出结果的指向信息,规则如下:
[0043]
在手机右侧显示右侧0
°
~180
°
,在手机左侧显示左侧0
°
~180
°
。
[0044]
这样,根据f所得结果就能输出为右侧f
°
。
[0045]
在利用校正函数进行校正前,有一个问题必须要解决,获得β时,tag在a、b、c、d四个区域都存在β角,我们需要进一步判别tag在哪个区域:
[0046]
首先,比对x-tag和y-tag距离(在测角算法中,直接比对飞行时间即可,无需解算y-tag的长度),当x-tag距离值小于y-tag时,保留x所在侧区域a和b,确认tag在此两个区域;
[0047]
其次,待用户顺时针转动手机时,由图可知,当tag在a区域时,β值应该缩小,如果实际变化和理论推导相同,那么确定tag在a区域。
[0048]
这样,tag位置唯一,校正函数能够正确的输出结果。
[0049]
a、b、c、d区域的划分方法为:xy连线与xy中点所作xy垂线实现区域划分。
[0050]
实施例2:一种超声防丢追踪器指向信息的校正方法,参照附图2,该校正方法的前提为智能设备与超声防丢追踪器交互获得角度数据β,获得至少一组距离数据b,这也是智能设备精确查找防丢追踪器所必须的数据,因此,在使用智能设备与防丢追踪器交互时,β
和b为已知数据,可为校正算法直接导入,无法再次测角测距。
[0051]
在本方案的前置交互中,使用智能设备(手机)前端和后端的两个扬声器作为测角交互单元,这里的扬声器并非以o点所在水平线对称设置(许多手机前后两端的扬声器/麦克风存在一定偏差角),可以发现,对于已经生产出的手机而言,手机可视化界面(显示屏)的尺寸是已知的,扬声器在手机中的相对位置也是已知的。
[0052]
校正方法包括以下步骤:
[0053]
基于手机的可视化界面,建立一个校正平面模型,将防丢追踪器tag正投影至此校正平面上,将三维模型二维简化,便于校正。
[0054]
通过测角算法确定所调用的两个扬声器,知晓扬声器信息后根据其在手机中的相对位置,将扬声器也正投影至校正平面中。
[0055]
在校正平面中确定扬声器对应的正投影点后,将其分别命名为x和y,同时选择好校正点o,这里,校正点o为可视化界面的中心点,对于常规的手机、平板、手表等设备而言,可视化界面的中心点也基本为设备整体的中心点,偏差值极小,可以忽略不计。
[0056]
选择点x与o点和tag点连线围成三角形,基于该三角形即可建立校正函数f,f的输出结果即为ox与o-tag的夹角,这里校正函数其中,α为ox与x-tag所围角,a为o-tag长度,b为x-tag长度,从o向x方向的可视化界面边线作垂线,该垂线与ox的夹角为θ。
[0057]
进一步地,详细阐述f建立的原理:参照附图1,根据测距测角结果,可以知道xy与y-tag的夹角为β,x-tag的长度为b,而根据手机参数的收集录入,可以知道xy长度为d,已知x、y、tag围成三角形的两边和一角,通过三角函数可以得到xy和x-tag所夹角度γ(图中未标出);
[0058]
图中,xy相对经过o点的水平线对称布置,因此,可以知道o到x所在水平线的距离为1/2d,且x到o点所在垂线的距离l也是可以通过手机尺寸和麦克风位置推导获得,因此ox长度c及夹角θ可以通过三角函数推导得到;
[0059]
不同于实施例1,此种情况下,ox与xy所夹角度不为θ,但是已知ox、oy、xy,ox与xy所夹角度δ(图中未示出)也能通过三角函数得到;
[0060]
已知α=γ-δ、b和c,再次利用三角函数可以得到o、x、tag所围三角形的所有数据,ox与o-tag的夹角也在其中;
[0061]
而获得的夹角为ox与o-tag的,通过 θ使其成为与手机指向的夹角。
[0062]
为了进一步方便用户能够直观的了解夹角,指定o为圆心,从o点向手机正前方边界作垂线,此垂线定义为0
°
位置,从o点向手机正后方边界作垂线,此垂线定义为180
°
位置,定义不同角度输出结果的指向信息,规则如下:
[0063]
在手机右侧显示右侧0
°
~180
°
,在手机左侧显示左侧0
°
~180
°
。
[0064]
这样,根据f所得结果就能输出为右侧f
°
。
[0065]
在利用校正函数进行校正前,有一个问题必须要解决,获得β时,tag在a、b、c、d四个区域都存在β角,我们需要进一步判别tag在哪个区域:
[0066]
首先,比对x-tag和y-tag距离(在测角算法中,直接比对飞行时间即可,无需解算y-tag的长度),当x-tag距离值小于y-tag时,保留x所在侧区域a和b,确认tag在此两个区
域;
[0067]
其次,待用户顺时针转动手机时,由图可知,当tag在a区域时,β值应该缩小,如果实际变化和理论推导相同,那么确定tag在a区域。
[0068]
这样,tag位置唯一,校正函数能够正确的输出结果。
[0069]
a、b、c、d区域的划分方法为:xy连线与xy中点所作xy垂线实现区域划分。
[0070]
上述方案中,通过测角用的麦克风/扬声器,基于智能设备可视化界面,选择校正点,基于校正点、任一使用的麦克风/扬声器的正投影点和tag围成三角形,从而建立校正函数f,利用测距测角参数和智能设备参数、麦克风和扬声器在智能设备上的位置参数,将麦克风/扬声器相对tag的角度修正为校正点o指向tag的角度,以消除指向角度误差,提升用户体验。
[0071]
另外,通过比对x-tag和y-tag距离及转动智能设备,从而确定tag相对智能设备所在区域,消除同角度下不同位置的可能性。
[0072]
另外,选择连线平行于可视化界面边界的两个麦克风/扬声器,使得划分区域时,划分界线与智能设备可视化界面边界的关系为平行/垂直,从而有利于后续将角度转化为只能设备相对tag的指向信息,处理更为便捷。
[0073]
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。