1.本公开涉及信息处理装置、信息处理方法以及非临时性的存储介质。
背景技术:
2.以往,有根据从作为监视者的监视对象的车辆取得的车辆信息决定关于车辆的监视优先级,根据监视优先级决定用于监视车辆的提示信息的例子(例如日本特开2020-61120号公报)。
技术实现要素:
3.本公开的目的在于提供一种能够降低远程监视者的负担的信息处理装置、信息处理方法以及程序。
4.本公开的一个方案是搭载于具备用于远程监视的监视装置的送货上门用的自动驾驶车辆的信息处理装置。该信息处理装置包括控制部,所述控制部当在自动驾驶车辆的停止状态下判定为在自动驾驶车辆内无投递员的情况下,抑制监视装置的监视功能。
5.作为其他方案,本公开可以包括具有与上述信息处理装置同样的特征的信息处理方法、计算机程序、记录有计算机程序的非临时性的记录介质以及信息处理系统等。
6.根据本公开,能够通过监视功能的抑制降低远程监视者的负担。
附图说明
7.图1是示出实施方式所涉及的信息处理系统的结构例的图。
8.图2是示出图1所示的车载信息处理系统的结构例的图。
9.图3是示出监视装置的结构例的图。
10.图4是示出动作例1的流程图。
11.图5是示出动作例2的流程图。
12.图6是示出动作例3的流程图。
具体实施方式
13.实施方式所涉及的信息处理装置搭载于具备用于远程监视的监视装置的送货上门用的自动驾驶车辆。另外,信息处理装置包括在自动驾驶车辆为停止状态下判定为在自动驾驶车辆内无投递员的情况下,抑制监视装置的监视功能的控制部。
14.通过监视功能的抑制,中断用于监视员进行监视的信息、或者降低提供的监视用的信息量。由此,能够降低监视员的监视的负担。
15.以下,参照附图,说明实施方式所涉及的信息处理装置、信息处理方法以及程序。实施方式的结构是例示。实施方式的结构可适宜地组合。
16.《信息处理系统的结构》
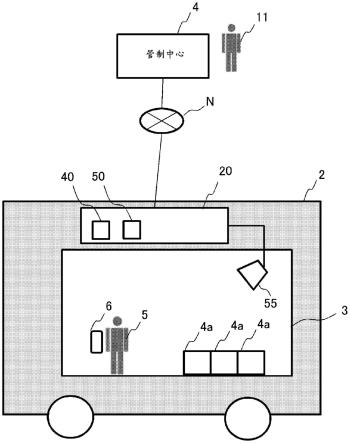
17.图1是示出实施方式所涉及的信息处理系统的结构例的图。在图1中,信息处理系
统具有车辆2、和管制中心4的计算机(以下记载为“管制中心4”)。在车辆2中,搭载有车载信息处理系统20,车载信息处理系统20和管制中心4用网络n连接,可相互通信。车载信息处理系统20是“信息处理装置”的一个例子。
18.网络n包括有线网络以及无线网络。有线网络例如还被称为核心网络、主干网等,是以光纤网等例示的宽带网络。无线网络例如包括以long term evolution(长期演进)(lte)、第5代移动通信系统(5g)、第6代移动通信系统(6g)等例示的便携电话网。
19.车辆2是送货上门用的自动驾驶车辆。在本实施方式中,车辆2是完全驾驶自动化(自动驾驶等级5)的车辆(完全自动驾驶车)。但是,车辆2并非一定是完全自动驾驶车,还可能有驾驶员搭乘的情况。车辆2既可以是用引擎驱动的例子,也可以是用马达驱动的例子。
20.管制中心4能够使用服务机、个人计算机、或者工作站等专用或者通用的计算机来构成。管制中心4管理包括车辆2的管理以及监视对象的车辆各自的运行、以及保养等。管制中心4例如制作定期地运行的车辆2的运行开始时刻、运行、运行结束时刻以及保养时间段等运行调度。管制中心4适时更新运行调度,分发给车辆2,管理车辆2的运行。车辆2能够进行依照运行调度的自动驾驶,在1个或者2个以上的投递目的地巡回。
21.在车辆2内,有收容有送货上门用的货品的货物室3,在货物室3中,收容有投递对象的货品4a。将货品4a投递给收货人的投递员5坐进货物室3。投递员5在车辆2在预定的位置停车(停止)的情况下,带着货品4a下车,移动到交接场所,将货品4a交给收货人。
22.投递员5持有智能钥匙6。车载信息处理系统20包括智能钥匙系统40。智能钥匙6在接收到从智能钥匙系统40发送的电波时,朝向智能钥匙系统40发送电波。智能钥匙系统40在来自智能钥匙6的电波的电场强度或者接收功率比预定等级低的情况等下,判定为智能钥匙6移动到车辆2的外部(车外),使车辆2的车门上锁。另外,智能钥匙系统40使车辆2的驱动源(引擎或者马达等)成为off。另一方面,在来自智能钥匙6的电波的电场强度或者接收功率强度成为预定等级以上时,设为能够使车门开锁,使驱动源成为on的状态。由此,投递员5在从车辆2下车并投递货品4a时,不进行车门的解锁以及上锁动作、以及使驱动源off也没关系。此外,智能钥匙6既可以是专用的智能钥匙设备,也可以是安装智能钥匙功能的智能设备(智能手机或者平板装置等)。
23.车载信息处理系统20将与自动驾驶相关的信息在适宜的定时通知给管制中心4。与自动驾驶相关的信息包括车载信息处理系统20为了自动驾驶而收集并认知的信息(车辆2的位置等)、表示基于认知的信息的判断、以及根据判断的结果进行的行驶机构的控制内容等的信息。车辆2的监视员11参照到达管制中心4的信息,监视在车辆2的自动驾驶中是否有异常等。上述与自动驾驶相关的信息的生成以及通知既可以由包含于车载信息处理系统20的监视装置50(图2)进行,也可以在监视装置50以外进行。
24.监视装置50控制对货物室3内等进行摄像的1个或者2个以上的摄像机55(摄像装置)的动作(on、off以及摄像范围等)。监视装置50针对由摄像机55摄像的监视用的摄像图像(称为“监视图像”),进行变换为向管制中心4的发送用的格式等加工。将通过加工得到的发送用的监视图像经由网络n发送给管制中心4。管制中心4能够与监视图像的数量(静止图像或者影像流的数量)匹配地,在1个或者2个以上的显示装置(1个或者2个以上的画面)显示监视图像。管制中心4的监视员11能够参照监视图像,监视有无异常等。摄像图像包括静止图像以及动画。监视员11是远程监视者。
25.在本实施方式中,监视装置50根据来自智能钥匙6的电波的接收状况等,判定投递员5是否不在车辆2内(移动到车外),在判定为不在的情况下,进行监视装置50的监视功能的抑制。
26.图2是示出图1所示的车载信息处理系统20的结构例的图。在图2中,车辆2包括data communication module(数据通信模块)(dcm)21、和central electrical control unit(中央电控单元)(central ecu)22。central ecu22经由车内网络23(例如车内lan(local area network,局域网)等),与预防安全装置24和自动驾驶系统(automatic driving system:ads)25连接。另外,central ecu22经由车内网络23,与声音影像navi装置26以及监视装置50连接。
27.dcm21是能够经由网络n与管制中心4等通信的通信装置。dcm21能够进行经由便携通信网的无线通信。central ecu22管理车辆2内的各设备。
28.central ecu22例如具有处理器和存储器。处理器执行存储器上的计算机程序(以下简称为“程序”),执行作为central ecu22的处理。
29.预防安全装置24内置ecu,通过程序的处理执行避免碰撞支援处理。预防安全装置24根据来自雷达以及摄像机等传感器的信号,执行例如避免碰撞的支持、行车道偏离的报告、自动远光灯、雷达巡航控制等。
30.ads25内置ecu,通过程序的执行,进行用于自动驾驶的信息的收集以及认知、基于认知的判断、基于判断的车辆2的动作的控制。ads25连接有spatial information service(空间信息服务)(sis)27以及advanced drive extension(高级驾驶扩展)(adx)28等。sis27以及adx28分别内置ecu,通过程序的处理执行精密且先进的驾驶支援处理。ads25例如通过来自light detection and ranging(光探测和测距)(lidar)的检测信号,探测车辆2的周边的车辆或者立体物等,推测车辆2自身的位置,执行运动控制。
31.sis27将车辆2自身的姿势以及地图上的位置等提供给ads25。sis27取得来自global navigation satellite system(全球导航卫星系统)(gnss)或者global positioning system(全球定位系统)(gps)的位置信息、来自陀螺传感器的6轴的加速度信号、或者来自导航系统的路径信息或者地图信息等。sis27根据取得的信息,计算车辆2自身的姿势以及地图上的位置等。adx28应用artificial intelligence(人工智能)(ai)系统,辨识并处理来自上述各种传感器等的信息,将处理结果通知给ads25。
32.声音影像navi装置26内置ecu,通过程序的处理,针对车辆2的利用者,提供利用声音、影像以及地图信息等的各种功能。
33.《监视装置的结构》
34.图3是示出监视装置50的结构例的图。监视装置50具备经由总线57连接的处理器51(“控制部”的一个例子)、存储装置52、通信装置53、智能钥匙检测机构54、摄像机55以及传感器56。监视装置50是计算机的一个例子,以装卸自如或者固定状态配置于车辆2。
35.存储装置52是非临时性的存储介质的一个例子,包括主存储装置和辅助存储装置。主存储装置被用作程序以及数据的存储区域、程序的展开区域、程序的作业区域、或者通信数据的缓冲区域等。主存储装置由ram(random access memory,随机存取存储器)、或者ram和rom(read only memory,只读存储器)的组合构成。辅助存储装置被用作数据以及程序的存储区域。作为辅助存储装置,能够应用非易失性存储介质。非易失性存储介质例如
是硬盘、solid state drive(固态硬盘)(ssd)、闪存存储器、或者eeprom(electrically erasable programmable read-only memory:电可擦可编程只读存储器)等。
36.通信装置53是进行通信处理的电路。通信装置53例如是与车内网络23(车内lan)连接的网络接口卡(nic)。
37.智能钥匙检测机构54包括朝向智能钥匙6发送电波的发送机、和接收来自智能钥匙6的电波的接收机。处理器51能够使用来自接收机的输出,计算接收电波的电场强度或者接收功率。此外,监视装置50也可以采用经由通信装置53以及车内网络23,从智能钥匙系统40接收电场强度或者接收功率的计算结果的结构。在该情况下,智能钥匙检测机构54可省略。此外,在本实施方式中,设想将监视装置50附加于车辆2(能够以从智能钥匙系统40独立(不依赖)的动作进行智能钥匙的位置推测)的情况,设置智能钥匙检测机构54。
38.在本实施方式中,准备2个以上的摄像机55。摄像机55被分别配置成可对货物室3、投递员5的座席以及车辆2的车门附近等车辆2的内外的预定的多个位置进行摄像。另外,摄像机55也可以具有能够通过处理器51等变更其视角以及摄像方向的结构。传感器56是例如人感传感器,检测在车内存在的人(投递员5等)。利用人感传感器的检测方法没有限定,人感传感器可以是光传感器、或者cds传感器等。不过,传感器56的种类、即传感器56检测的物理量(传感器56的输出)可根据监视的对象适宜地变更。
39.处理器51是例如cpu(central processing unit,中央处理单元)等。处理器51通过执行存储于存储装置52等的各种程序,进行各种处理。例如,处理器51能够根据智能钥匙检测机构54的输出,计算来自智能钥匙6的接收电波的电场强度或者接收功率,根据该计算结果,判定投递员5是否处于车内。另外,处理器51能够进行摄像机55的摄像图像的解析,判定在车辆2的内部是否有投递员5。另外,处理器51还能够根据传感器56的输出,判定投递员5是否处于车内。或者,处理器51也可以经由车内网络23,接收基于智能钥匙系统40的、车辆2的车门的解锁信号以及上锁信号,接受上锁信号而判定为投递员5去到车外,接受解锁信号而判定为投递员5在车内。
40.处理器51在判定为投递员5不在车内、即去到车外的情况下,进行监视功能的抑制。监视功能的抑制例如是监视装置50的动作停止(off)。监视功能的抑制可以是多个摄像机55全部off、一部分的摄像机55off。由于一部分的摄像机55off,例如被变更为对车辆2的车门附近进行摄像的1台~几台摄像机的运用。是为了尽快发现结束投递并回到车辆2的投递员5。由于一部分的摄像机55off,监视图像的摄影范围(监视范围)比非抑制时变小。另外,监视功能的抑制也可以是使将摄像机55的摄像图像变换为发送用的格式的处理(加工)off、或者基于通信装置53的off而停止发送、停止从dcm21发送监视图像。
41.另外,处理器51在根据智能钥匙检测机构54、摄像机55以及传感器56的至少一个的输出判定为投递员5在车内(回到车内)的情况下,解除监视功能的抑制。
42.《动作例》
43.图4是示出监视装置50的处理器51的处理例(动作例1)的流程图。在流程图的开始时间点,监视装置50的监视功能是非抑制时的状态。
44.在步骤s001中,处理器51取得车辆2的状态信息。即,处理器51针对central ecu22查询车辆2的状态。central ecu22从ads25取得表示车辆的状态的信息,送给处理器51。这样,处理器51取得表示车辆2的状态的信息。
45.在步骤s002中,处理器51判定表示车辆2的状态的信息是否表示车辆2的停止状态。例如,处理器51在表示车辆2的状态的信息表示车辆2实施了驻车刹车的状态的情况下,判定为车辆2是停止状态。在判定为车辆2是停止状态的情况下,处理进入到步骤s003,否则,处理返回到步骤s001。停止状态也可以是实施了驻车刹车的状态以外的状态。
46.在步骤s003中,处理器51判定智能钥匙6是否在车外。即,处理器51根据来自智能钥匙检测机构54的输出,计算来自智能钥匙6的电波的电场强度或者接收功率,判定计算结果是否为预定的阈值(存储于存储装置52等)以下。在判定为计算结果是阈值以下的情况下,当作智能钥匙6位于车外(持有智能钥匙6的投递员5去到车外)来处理。此时,处理进入到步骤s004。
47.此外,步骤s003的处理也可以如以下所述。即,处理器51将电场强度或者接收功率的时间上的变化(历史)存储到存储装置52。处理器51在历史中的判定对象的时间段中,电场强度或者接收功率从超过阈值的状态变化为成为阈值以下的状态的情况下,判定为智能钥匙6位于(存在于)车外。
48.在步骤s003中,判定为计算结果超过阈值的情况下,当作智能钥匙6位于车内(投递员5在车内)来处理,处理返回到步骤s001。此外,在步骤s003中,也可以将电场强度或者接收功率换算为距离,根据距离的长度,判定智能钥匙6在车内还是在车外。
49.在步骤s004中,处理器51进行监视功能的抑制处理。即,处理器51进行将在非抑制时使用多台的摄像机55的使用数量减少为预定数量(例如1台)的处理。此时,既可以使摄像机55全部成为off,也可以使发送用的监视图像的生成处理、以及将发送用的监视图像发送给central ecu22的处理成为off。
50.在步骤s005中,处理器51判定智能钥匙6是否在车外。该处理与步骤s003的处理相同。在判定为智能钥匙6在车外的情况下,处理进入到步骤s006,否则,为了投递员5回到车内的情况下的处理,处理进入到步骤s007。
51.此外,步骤s005的处理也可以如以下所述。即,处理器51将电场强度或者接收功率的时间上的变化(历史)存储到存储装置52。处理器51在历史中的判定对象的时间段中,电场强度或者接收功率从阈值以下的状态变化为超过阈值的状态的情况下,判定为智能钥匙6位于(存在于)车内。
52.在步骤s006中,处理器51判定在车内是否有人。即,处理器51通过摄像机55的摄像图像的解析、或者传感器56的输出的解析,判定在车内是否有人。是为了在投递员5不在时,检测可疑者等侵入车内的情况。在判定为有人的情况下,处理进入到步骤s007,否则,处理返回到步骤s005。
53.在步骤s007中,处理器51解除监视功能的抑制处理,返回到非抑制时的状态。之后,处理返回到步骤s001。此外,步骤s006的处理是可选的。
54.图5是示出监视装置50的处理器51的处理例(动作例2)的流程图。在流程图的开始时间点,监视装置50的监视功能是非抑制时的状态。在与动作例1的处理(图4)的比较中,图5的处理在(1)代替步骤s003而设置有步骤s003a这点、以及(2)步骤s005被省略这点上与图4的处理不同。因此,说明步骤s003a,省略关于其他步骤的说明。
55.在步骤s003a中,处理器51进行摄像机55的输出(摄像图像)的解析以及传感器56的输出的解析的至少一方,判定人(投递员5)是否不在车内。此时,在摄像图像中摄有人的
情况下,也可以通过图像解析(衣服的颜色、花样的判别等)判定人是否为投递员5。另外,也可以组合多个或者多种传感器56的输出,判定人是否为投递员5。然后,在判定为在车内无人(投递员5)(不在)的情况下,处理进入到步骤s004,否则,处理返回到步骤s001。如动作例2所述,可以代替使用来自智能钥匙6的电波的判定,而进行使用摄像机55以及传感器56的至少一方的输出的判定。
56.图6是示出监视装置50的处理器51的处理例(动作例3)的流程图。在流程图的开始时间点,监视装置50的监视功能是非抑制时的状态。在与动作例1的处理(图4)的比较中,在图6的处理中,在步骤s003与步骤s004之间插入有步骤s003a。各步骤的详细内容与动作例1以及2相同,所以省略说明。如动作例3所述,可以进行使用来自智能钥匙6的电波的判定、和使用摄像机55以及传感器56的至少一方的输出的判定这双方,提高是否不在的判定精度。
57.此外,在动作例1~3中,示出处理器51的动作例,但也可以由central ecu22进行由处理器51进行的处理。在该情况下,处理器51从智能钥匙检测机构54、摄像机55以及传感器56,将各输出发送给central ecu22。另外,接受到来自central ecu22的指示的处理器51进行监视功能的抑制以及其抑制解除。或者,也可以通过central ecu22停止向dcm21发送监视图像,进行监视功能的抑制。另外,利用监视装置50的监视通过对监视图像进行摄像并发送给管制中心4来进行。但是,也可以将一个或者多个传感器56的输出、或者多种传感器56的输出发送给管制中心4,监视员11使用从传感器56的输出得到的信息进行监视。在该情况下,监视功能的抑制例如通过停止发送传感器56的输出来进行。另外,监视还能够使用监视图像以及传感器输出来进行,该情况的抑制能够通过停止发送监视图像以及传感器输出的至少一方等来进行。
58.《实施方式的作用效果》
59.在实施方式中,车辆2是具备用于远程监视的监视装置50的送货上门用的自动驾驶车辆。在车辆2中,作为信息处理装置,搭载有车载信息处理系统20。包含于车载信息处理系统20的处理器51(或者central ecu22)在车辆2的停止状态下判定为在车辆2内无投递员5的情况下,抑制监视装置50的监视功能。通过抑制,不将监视图像发送给管制中心4、或者将摄像范围缩小(摄像机55的数量减少)后的情况下的监视图像发送给管制中心4。因此,监视员11在投递员5不在车辆2内的情况下,可以不进行利用监视图像的监视、或者在监视画面减少的状态下进行监视即可。这样,能够减轻监视员11的负担。
60.在实施方式中,作为控制部的处理器51在车辆2的停止状态下判定为车辆2的智能钥匙6不在车辆2内的情况下,能够判定为在车辆2的停止状态下在车辆2内无投递员5(图4的s003)。即,能够使用来自智能钥匙6的电波,判定投递员5是否在车内。
61.处理器51也可以在车辆2的停止状态下智能钥匙6的电波的电场强度或者接收功率的历史表示智能钥匙6从车辆2的车内移动到车外的情况下,判定为智能钥匙6在车外(s003)。然后,也可以依照这样的判定抑制监视功能(s004)。通过并非基于1次的计算结果的判定,而根据历史判定智能钥匙6在车内还是在车外,能够提高判定精度。
62.另外,处理器51例如能够根据智能钥匙6的电波的电场强度或者接收功率的历史,判定为智能钥匙6从车外移动到车内(图4的s005)。然后,能够依照这样的判定,解除监视功能的抑制(s007)。
63.另外,处理器51在车辆2的停止状态下根据对车辆2内进行摄像而得到的摄像图像
以及传感器56的输出的至少一方判定为在车辆2内无投递员的情况下(图5的s003a),能够抑制监视功能(s004)。
64.另外,在本实施方式中,在监视功能的非抑制状态下,监视装置50对车辆2的监视用的图像(监视图像)进行摄像。处理器51在监视功能的抑制状态下,使监视用的图像的摄像范围小于非抑制状态下的监视用的图像的摄像范围。例如,减少进行摄像的摄像机55的台数。由此,能够进行监视功能的抑制(s004)。通过用于监视的摄像范围变小,由于监视员11通过参照监视图像来进行监视的范围变小,所以负担减少。关于摄像范围的减少,也可以通过减小监视图像的视角,减少映入监视图像内的监视的对象。监视功能的抑制(s004)既可以是停止监视图像的摄像,也可以是停止摄像得到的监视图像的加工(向发送用的监视图像的尺寸或者格式变换)。通过停止加工,监视图像不被正常地发送,所以管制中心4无法正常地显示监视图像。监视员11将该状态辨识为不需要监视时,不进行监视,从而能够减轻监视员11的负担。另外,监视功能的抑制也可以是停止监视图像的发送。
65.另外,处理器51在监视功能的抑制状态下,在智能钥匙6处于车外的状态下判定为在车辆2内有人的情况下,能够解除监视功能的抑制。由此,能够在投递员5以外的人员侵入车内的情况下,再次开始监视。
66.《其他》
67.上述实施方式只不过是一个例子,本公开能够在不脱离其要旨的范围内适宜地变更而实施。另外,说明为由1个装置进行的处理也可以由多个装置分担执行。或者,说明为由不同的装置进行的处理也可以由1个装置执行。在计算机系统中,能够灵活地变更通过什么样的硬件结构(服务器结构)实现各功能。
68.本公开还能够通过以下从操作实现:将安装有在上述实施方式中说明的功能的计算机程序供给给计算机,该计算机具有的1个以上的处理器读出并执行程序。这样的计算机程序既可以通过能够连接到计算机的系统总线的非临时性的计算机可读存储介质提供给计算机,也可以经由网络提供给计算机。非临时性的计算机可读存储介质例如是磁盘(软盘(注册商标)、硬盘驱动器(hdd)等)、光盘(cd-rom、dvd盘、蓝光盘等)等任意类型的盘。另外,在非临时性的计算机可读存储介质中,包括只读存储器(rom)、随机存取存储器(ram)、eprom、eeprom、磁卡、闪存存储器、光学式卡、适合于储存电子命令的任意类型的介质。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。