1.本发明涉及科教展示领域,具体是一种多轴系三维动态似动现象展示装置的展示控制方法。
背景技术:
2.似动现象是将静止的物体看成是运动的或把不连续的位移看成是连续运动的现象,即通过心理补偿活动产生的运动视觉感知。视觉暂留现象是光对视网膜所产生的视觉在光停止作用后,仍保留一段时间的现象,通常在三十分之一到五分之一秒之间。“视觉暂留”是生理上的现象,而似动现象的“心理补偿”则进一步说明视觉感官中,将连续相似的图像在大脑中组织起来的心理作用,进而将相似图像设别为动态图像,是孤立的画面形成顺畅的衔接,产生视觉动感。似动现象和视觉暂留现象与光强、环境、视觉疲劳程度有关,动作间隔时间、暂留时间的长短与所受光刺激的强度、作用时间的长短以及颜色等因素有关。利用似动现象和视觉暂留现象,可以实现动画、电影等视觉媒体制作和传播。
3.在实际科教教学过程中,通常会通过高速旋转模型来实现并展示视觉暂留现象。在观测高速旋转的物体时,通过调节频闪灯光的闪动频率产生频闪效应,使其与被测物体的转动或运动物体的速度接近或同步时,高速运动物体看上去是缓慢运动或静止,从而实现动画过程。然而目前的展示装置在展示动画时,需要在展示层上设置动作模型,同样数量的动作模型,在同一平面内转动时可产生连续的动画效果,在不同的高度转动时可产生分层的动画效果,然而为了实现连续动画效果及分层动画效果通常分别需要用到两组展示装置,仅通过一个展示装置无法同时展示连续动画效果及分层动画效果,展示过程单一。
4.同时,针对展示装置布置环境的不同以及所展示人群的不同,展示装置无法通过一种设置参数使展示出的动画对所有人都呈现出最佳的展示效果,因此亟待解决。
技术实现要素:
5.为了避免和克服现有技术中存在的技术问题,本发明提供了一种多轴系三维动态似动现象展示装置的展示控制方法。本发明针对不同人群在不同环境下都能呈现出最佳的展示效果。
6.为实现上述目的,本发明提供如下技术方案:
7.一种多轴系三维动态似动现象展示装置的展示控制方法,包括如下步骤:
8.s1、搭建三维动态似动现象的展示装置;
9.s2、通过控制函数g表示展示装置的似动现象效果:
10.g
∝
αf(tj)[f(q)/f(r)]
[0011]
α为视觉疲劳程度;
[0012]
tj为动作显示时间间隔;
[0013]
q为展示装置的光源强度;
[0014]
r为展示装置上动作模型间的空间距离;
[0015]
f(tj)为tj的单调递增函数;
[0016]
f(q)为g的单调递增函数;
[0017]
f(r)为r的单调递增函数;
[0018]
s3、建立目标函数库,从目标函数库中选取最佳函数,采用最小二乘法获得控制函数g中各系数的最优解;
[0019]
s4、确定控制函数g的转动角速度范围;
[0020]
s5、结合控制函数g建立输入参数数据库,构建机器学习控制算法,从而自调整影响控制函数g的关联参数。
[0021]
作为本发明进一步的方案:在步骤s3中,获得控制函数g中各系数的最优解时,采用矩阵法做最小二乘,其矩阵形式为:
[0022]fθ
(x1,x2,...,xn)=θ0 θ1x1 ... θnxn[0023][0024]
其中,xn为输入变量;
[0025]
ym为因变量;
[0026]
m和n为各变量的数量,
[0027]
θn为参数;
[0028]
θ为(θ1,θ2,
…
,θn)的矩阵;
[0029]
x为(x1,x2,
…
,xn)的矩阵;
[0030]
y为(y1,y2,
…
,ym)的矩阵;
[0031]
t表示转置;
[0032]
通过最小二乘法得到loss残差函数j(θ):
[0033][0034]
其中,(x,y)为一对观测量;
[0035]
tr代表矩阵特征值的总和;
[0036]
采用法向量解线性方程组法或梯度下降法,求残差函数j(θ)的最小值,基于指定样本数据,获得最佳参数的拟合函数。
[0037]
作为本发明再进一步的方案:f(t)
∝
f(a,b,c);
[0038]
f(q)
∝
f(d,e,f);
[0039]
f(r)
∝
f(gn);
[0040]
其中,a为展示装置的频闪频率;
[0041]
b为展示装置的转速;
[0042]
c为展示装置的转向;
[0043]
d为展示装置频闪亮度;
[0044]
e为展示过程中的环境光强;
[0045]
f为展示装置的频闪颜色;
[0046]gn
为展示装置中不同展示层间的周向距离。
[0047]
作为本发明再进一步的方案:在步骤s4中,由于2π=pndω、2πr=pndv;
[0048]
其中,p为视觉暂留时间,0.1s≤p≤0.4s;
[0049]
nd为动作模型在频闪条件下的数量;
[0050]
ω为展示装置中展示层的转动角速度,且π/pmd≤ω≤2π,单位为rad/s;
[0051]
md为动作模型数量;
[0052]
r为展示装置中展示层的半径;
[0053]
υ为展示装置中动作模型的线速度,单位为m/s;
[0054]
频闪连续两次点亮的时间间隔及频闪灯光点亮后持续的时间均为t,在时间t内频闪灯光转过的角度为θ
p
,0.02
°
≤θ
p
≤0.20
°
;
[0055]
t与角速度ω的关系为:t=θ
p
/ω;
[0056]
动作模型在频闪条件下的数量为2时,展示层的转动角速度最小,角速度值为:
[0057]
ω
min
=2π/2pmd=π/pm
d rad/s;
[0058]
动作模型在频闪条件下的数量为1时,展示层的转动角速度最大,角速度值为:
[0059]
ω
max
=2π/p=20πrad/s;
[0060]
根据成像规律,展示层转动角速度ω的范围:
[0061]
π/pmd≤ω≤20πrad/s。
[0062]
作为本发明再进一步的方案:在步骤s3中,最佳函数为线性拟合函数、多项式拟合函数、一阶指数衰减拟合函数、一阶指数增长拟合函数、洛伦兹拟合函数及多峰值拟合函数中的任意一种。
[0063]
作为本发明再进一步的方案:在步骤s5中,输入参数数据库中的参数包括视觉疲劳程度α、展示装置的频闪频率a、展示装置的转速b、展示装置的转向c、展示装置频闪亮度d、展示过程中的环境光强e、展示装置的频闪颜色f以及展示装置中不同展示层间的周向距离gn;参与人输入影响视觉疲劳程度α的视觉状态数据,视觉状态数据包括正常、近视、远视、散光状态,设置视觉疲劳程度α以及控制函数中g的似动现象效果范围,持续提高参与人的数量从而增加输入参数数据库的数据;通过对控制函数g的参数进行自调整,实现控制机器学习控制算法的自学习。
[0064]
作为本发明再进一步的方案:该展示装置包括如下组成部分:
[0065]
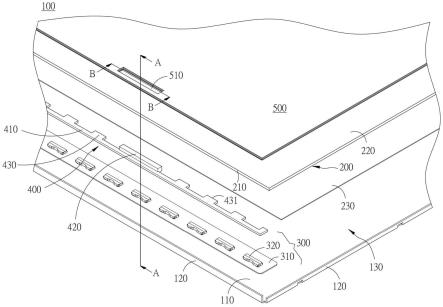
展示层,呈圆环状曲面并自内向外同轴设置有至少两层,各展示层受光照后呈现图案效果;
[0066]
旋转轴,与展示层数量对应,且各旋转轴自内向外与对应的展示层同轴固定,各旋转轴之间彼此套接且同轴回转配合;
[0067]
驱动部,驱动各旋转轴带动对应展示层旋转;
[0068]
抬升部,抬升或降下各展示层以使得各展示层高度平齐或高度错开;
[0069]
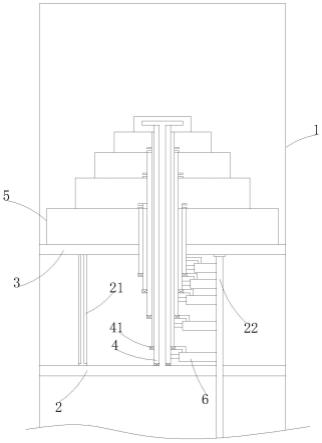
各所述展示层均布置在支撑座上,支撑座下方平行布置有固定座,自内向外,各旋转轴的长度依次降低且各旋转轴均穿过支撑座后向固定座方向延伸,位于最内层的旋转轴安装在固定座上并与固定座回转配合;所述抬升部为沿铅垂方向布置在固定座上的液压缸,液压缸的驱动端与支撑座相连;所述液压缸伸长至极限状态时,各展示层位于同一高
度。
[0070]
作为本发明再进一步的方案:以相邻布置的两圈旋转轴分别为内旋转轴以及外旋转轴,内旋转轴上套设有支撑轴承,且内旋转轴上的支撑轴承与外旋转轴沿铅垂方向的位置存在交集;所述液压缸伸长至极限状态时,内旋转轴上的支撑轴承与外旋转轴之间的距离,等于内旋转轴对应展示层的高度。
[0071]
作为本发明再进一步的方案:所述驱动部为与旋转轴数量对应的齿轮驱动器,各齿轮驱动器与对应支撑轴承的轴承外圈固定连接;各旋转轴均在支撑轴承下方设置有传动齿轮并通过传动齿轮与对应的齿轮驱动器啮合传动;所述支撑座和/或固定座上布置有限制齿轮驱动器随对应旋转轴转动的限位组件;所述支撑座下方沿铅垂方向布置有贯穿固定座的限位滑轨,限位滑轨即为限位组件;各齿轮驱动器均固定在限位滑轨上并可沿限位滑轨铅垂滑动。
[0072]
作为本发明再进一步的方案:所述固定座同轴固定在罩体内,支撑座在罩体内与罩体沿铅垂方向滑动配合,罩体为玻璃罩;所述罩体顶部设置有与各展示层数量以及位置对应的彩色频闪光带。
[0073]
与现有技术相比,本发明的有益效果是:
[0074]
1、本发明通过输入量数据的不断积累和数据库的完善,可以实现控制函数的自学习、自优化、自调整,针对不同的环境以及不同的参观人群,优化影响展示效果的关联参数,针对不同人群在不同环境下都能呈现出最佳的展示效果。
[0075]
2、本发明设置多层展示层,在展示层位于同一高度并受光照后,各展示层可重叠并形成连续的动画效果;当各展示层被抬升以改变高度后,各展示层可高度错开并形成独立的分层动画,通过一个展示装置可在连续动画模式和分层动画模式中切换,实现多种动画过程,展示的动画过程具备多样性,满足实际科教教学的需求。
[0076]
3、本发明以液压缸作为升降动力源,以液压缸伸长至极限状态时为初始工作状态,此时各展示层位于同一高度,各展示层旋转时位于同一高度从而可产生重合的连续动画;液压缸缩回时,最内层的展示层高度不变,其他展示层与对应的旋转轴高度逐渐降低,高度降低的过程中,自内向外,旋转轴上的支撑轴承依次与该旋转轴外圈的旋转轴抵接从而将其顶起;随着液压缸的均匀回缩,各展示层之间逐渐形成高度差,最内层的展示层高度不变,并位于最高端,自内向外其他展示层高度依次降低,以使得各展示层自内向外高度呈阶梯状排布。此时各展示层旋转时可产生独立的分层动画。
[0077]
4、本发明各支撑轴承与外圈旋转轴位置的合理布置,使得液压缸回缩至极限状态时,各展示层可呈阶梯状高度均匀布置;通过在支撑轴承外圈固定齿轮驱动器,即可以齿轮驱动器作为动力源以啮合的方式驱动各旋转轴以预定的转速旋转,同时通过限位滑轨的限位可确保各齿轮驱动器不与旋转轴同步旋转,实现了旋转和升降过程的稳定性。
[0078]
5、本发明的各部件均布置在罩体内,在实际展示时起到了安全防护的效果,通过罩体可对支撑座产生导向作用,避免其升降过程中发生位置偏移;由于罩体顶部设置有与展示层数量以及位置对应的彩色频闪光带,当各展示层加速到预定转速时,彩色频闪光带透射出的彩色光线至展示层上,从而在展示层旋转时展示形成不同的动作姿态轮廓。
附图说明
[0079]
图1为本发明展示装置其中一种工作状态下的结构示意图。
[0080]
图2为本发明展示装置另一种工作状态下的结构示意图。
[0081]
图3为本发明展示装置的控制系统图。
[0082]
图中:
[0083]
1、罩体;
[0084]
2、固定座;21、液压缸;22、限位滑轨;
[0085]
3、支撑座;4、旋转轴;41、支撑轴承;
[0086]
5、展示层;6、齿轮驱动器。
具体实施方式
[0087]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0088]
请参阅图1~3,本发明实施例中,一种多轴系三维动态似动现象展示装置的展示控制方法,
[0089]
包括如下步骤:
[0090]
s1、搭建三维动态似动现象的展示装置;
[0091]
展示装置包括圆筒状的罩体1,罩体1为玻璃罩,罩体1内在底部设置有固定座2,固定座2上方设置有支撑座3,固定座2以及支撑座3均呈圆柱状且直径与罩体1内径吻合。
[0092]
固定座2以及支撑座3之间通过液压缸21连接,液压缸21伸缩运动时可带动支撑座3在罩体1内沿铅垂方向滑动。
[0093]
支撑座3上设置有展示层5,展示层5为圆环面,至少布置有两层且各展示层5自内向外依次同轴布置,展示层5为透明材质;展示层5上预先布置有不同的动作模型。
[0094]
罩体1顶部设置自内向外设置有呈环状的彩色频闪光带,彩色频闪光带与各展示层5沿铅垂方向的位置对应,并可透射出的彩色光线至展示层5的动作模型上,从而在动作模型旋转时展示形成不同的动作姿态轮廓。
[0095]
本发明的实施例中展示层5共布置有五层,分别显现出深海蟹、管状蠕虫、菌席、硫化细菌、深海热液等模型的动作姿态轮廓,当各展示层5加速到预定转速时,彩色频闪光带的光照频率与各展示层的速度配合,五层展示层即可呈现出以下三维分层动画过程:第一层为深海章鱼抓捕并吃掉深海蟹;第二层为深海蟹移动到管状蠕虫旁,吃掉管状蠕虫;第三层为管状蠕虫在菌席旁边生长,且越来越多;第四层为硫化细菌吸收营养,越来越多;第五层为深海热液喷发。当各展示层5位于同一高度或高度错开时,各层动画可重合形成连续动画,或分层在不同高度形成独立的分层动画。
[0096]
为实现对各展示层5的驱动,通常最外层的展示层5固定在支撑座3上高度不动,并与支撑座3同轴回转配合,其余展示层5可相对于支撑座3高度上升。各展示层5均沿轴向布置有旋转轴4,各旋转轴4自内向外层层套接且彼此同轴回转配合。
[0097]
位于最内圈的展示层5所对应的旋转轴4同样位于最内层,自内向外,各旋转轴4的
长度依次降低。位于最内层的旋转轴4同轴固定在支撑座3上并与支撑座3回转配合,除最内层的旋转轴4外的其余旋转轴4则与支撑座3之间存在一定间距。
[0098]
由于各旋转轴4彼此套接,各旋转轴4的轴身包括套接区以及位于套接区下方的安装区,各旋转轴4在安装区套接固定有支撑轴承41,支撑轴承41与该旋转轴4外圈的旋转轴4沿铅垂方向的位置存在交集。
[0099]
以液压缸21伸长至极限状态时为初始工作状态,此时各展示层5位于同一高度,各展示层5旋转时位于同一高度从而可产生重合的连续动画。液压缸21缩回时,最内层的展示层5高度不变,其他展示层5与对应的旋转轴4高度逐渐降低。以相邻两圈旋转轴4分别为内旋转轴以及外旋转轴为例,高度降低的过程中,自内向外,内旋转轴上的支撑轴承41与外旋转轴抵接从而将其顶起,抵接部位为支撑轴承41的内圈。
[0100]
随着液压缸21的均匀回缩,各展示层5之间逐渐形成高度差,最内层的展示层5高度不变,并位于最高端,自内向外其他展示层5高度依次降低,以使得各展示层5自内向外高度呈阶梯状排布。此时各展示层5旋转时可产生独立的分层动画。
[0101]
为达到最好的展示效果,调整支撑轴承41的位置,使初始工作状态时,内旋转轴上的支撑轴承41与外旋转轴承之间的距离,与内旋转轴4对应的展示层5高度相等。
[0102]
为实现各展示层5的旋转,各旋转轴4的安装区上还安装有位于支撑轴承41下方的传动齿轮,传动齿轮与对应的旋转轴4同轴固定。各支撑轴承41的轴承外圈上均固定有齿轮驱动器6,齿轮驱动器6作为动力源,与对应旋转轴4上的传动齿轮啮合传动,从而驱动各旋转轴4以及展示层5旋转。
[0103]
为确保齿轮驱动器6不随旋转轴4同步转动,支撑座3下方沿铅垂方向布置有贯穿固定座2的限位滑轨22,所有的齿轮驱动器6均固定在限位滑轨22上并可沿限位滑轨22铅垂滑动,从而避免与旋转轴4同步转动。
[0104]
s2、通过控制函数g表示展示装置的似动现象效果:
[0105]g∝
αf(tj)[f(q)/f(r)]
[0106]
α为视觉疲劳程度;
[0107]
tj为动作显示时间间隔;
[0108]
q为展示装置的光源强度;
[0109]
r为展示装置上动作模型间的空间距离;
[0110]
f(tj)为tj的单调递增函数;
[0111]
f(q)为g的单调递增函数;
[0112]
f(r)为r的单调递增函数。
[0113]
f(t)
∝
f(a,b,c);
[0114]
f(q)
∝
f(d,e,f);
[0115]
f(r)
∝
f(gn);
[0116]
其中,a为展示装置的频闪频率;
[0117]
b为展示装置的转速;
[0118]
c为展示装置的转向;
[0119]
d为展示装置频闪亮度;
[0120]
e为展示过程中的环境光强;
[0121]
f为展示装置的频闪颜色;
[0122]gn
为展示装置中不同展示层间的周向距离。
[0123]
s3、建立目标函数库,从目标函数库中选取最佳函数,采用最小二乘法获得控制函数g中各系数的最优解;
[0124]
最佳函数为线性拟合函数、多项式拟合函数、一阶指数衰减拟合函数、一阶指数增长拟合函数、洛伦兹拟合函数及多峰值拟合函数中的任意一种。
[0125]
获得控制函数g中各系数的最优解时,采用矩阵法做最小二乘,其矩阵形式为:
[0126]fθ
(x1,x2,...,xn)=θ0 θ1x1 ... θnxn[0127][0128]
其中,xn为输入变量;
[0129]
ym为因变量;
[0130]
m和n为各变量的数量,
[0131]
θn为参数;
[0132]
θ为(θ1,θ2,
…
,θn)的矩阵;
[0133]
x为(x1,x2,
…
,xn)的矩阵;
[0134]
y为(y1,y2,
…
,ym)的矩阵;
[0135]
t表示转置;
[0136]
通过最小二乘法得到loss残差函数j(θ):
[0137][0138]
其中,(x,y)为一对观测量;
[0139]
tr代表矩阵特征值的总和;
[0140]
采用法向量解线性方程组法或梯度下降法,求残差函数j(θ)的最小值,基于指定样本数据,获得最佳参数的拟合函数。
[0141]
s4、确定控制函数g的转动角速度范围;
[0142]
由于2π=pndω、2πr=pndv;
[0143]
其中,p为视觉暂留时间,0.1s≤p≤0.4s;
[0144]
nd为动作模型在频闪条件下的数量;
[0145]
ω为展示装置中展示层的转动角速度,且π/pmd≤ω≤2π,单位为rad/s;
[0146]
md为动作模型数量;
[0147]
r为展示装置中展示层的半径;
[0148]
υ为展示装置中动作模型的线速度,单位为m/s;
[0149]
频闪连续两次点亮的时间间隔及频闪灯光点亮后持续的时间均为t,在时间t内频闪灯光转过的角度为θ
p
,0.02
°
≤θ
p
≤0.20
°
;
[0150]
t与角速度ω的关系为:t=θ
p
/ω;
[0151]
动作模型在频闪条件下的数量为2时,展示层的转动角速度最小,角速度值为:
[0152]
ω
min
=2π/2pmd=π/pm
d rad/s;
[0153]
动作模型在频闪条件下的数量为1时,展示层的转动角速度最大,角速度值为:
[0154]
ω
max
=2π/p=20πrad/s;
[0155]
根据成像规律,展示层转动角速度ω的范围:
[0156]
π/pmd≤ω≤20πrad/s。
[0157]
s5、结合控制函数g建立输入参数数据库,构建机器学习控制算法,从而自调整影响控制函数g的关联参数。
[0158]
输入参数数据库中的参数包括视觉疲劳程度α、展示装置的频闪频率a、展示装置的转速b、展示装置的转向c、展示装置频闪亮度d、展示过程中的环境光强e、展示装置的频闪颜色f以及展示装置中不同展示层间的周向距离gn。
[0159]
参与人输入影响视觉疲劳程度α的视觉状态数据,视觉状态数据包括正常、近视、远视、散光状态。设置视觉疲劳程度α以及控制函数中g的似动现象效果范围,设置视觉疲劳程度α可设置为0~1,0表示疲劳程度最终,1表示疲劳程度最轻,数值可给出图片对比。似动现象效果g可设置范围为0~1,0表示效果最差,1表示效果最佳,并给出比对图,以便于选择。
[0160]
持续提高参与人的数量从而增加输入参数数据库的数据;通过对控制函数g的参数进行自调整,实现控制机器学习控制算法的自学习。
[0161]
以上结合具体实施例描述了本技术的基本原理,但是,需要指出的是,在本技术中提及的优点、优势、效果等仅是示例而非限制,不能认为这些优点、优势、效果等是本技术的各个实施例必须具备的。另外,上述公开的具体细节仅是为了示例的作用和便于理解的作用,而非限制,上述细节并不限制本技术为必须采用上述具体的细节来实现。
[0162]
本技术中涉及的器件、装置、设备、系统的方框图仅作为例示性的例子并且不意图要求或暗示必须按照方框图示出的方式进行连接、布置、配置。如本领域技术人员将认识到的,可以按任意方式连接、布置、配置这些器件、装置、设备、系统。诸如“包括”、“包含”、“具有”等等的词语是开放性词汇,指“包括但不限于”,且可与其互换使用。这里所使用的词汇“或”和“和”指词汇“和/或”,且可与其互换使用,除非上下文明确指示不是如此。这里所使用的词汇“诸如”指词组“诸如但不限于”,且可与其互换使用。
[0163]
还需要指出的是,在本技术的装置、设备和方法中,各部件或各步骤是可以分解和/或重新组合的。这些分解和/或重新组合应视为本技术的等效方案。
[0164]
提供所公开的方面的以上描述以使本领域的任何技术人员能够做出或者使用本技术。对这些方面的各种修改对于本领域技术人员而言是非常显而易见的,并且在此定义的一般原理可以应用于其他方面而不脱离本技术的范围。因此,本技术不意图被限制到在此示出的方面,而是按照与在此公开的原理和新颖的特征一致的最宽范围。
[0165]
为了例示和描述的目的已经给出了以上描述。此外,此描述不意图将本技术的实施例限制到在此公开的形式。尽管以上已经讨论了多个示例方面和实施例,但是本领域技术人员将认识到其某些变型、修改、改变、添加和子组合。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。