1.本发明涉及机器人应用技术领域,具体是一种双栖息臂栖息无人机及自适应起落和栖息方法。
背景技术:
2.四旋翼无人机在许多领域发挥巨大的作用,民用四旋翼无人机主要用于航拍、植保、巡检等,军用四旋翼无人机主要用于侦察。四旋翼无人机在动力和续航方面虽不断发展,但是续航时间局限于10到30分钟左右,仍然无法满足于长时间侦察和检测需求。各无人机厂商通过减少机身材料重量,优化桨叶气动特性等方法来延长无人机续航时间,但是效果并不显著。目前无人机使用的锂电池的能量密度无法满足无人机长时间侦察拍摄的工作需求,无人机的电能主要通过旋翼电机工作消耗,最好的节能方法就是让旋翼电机停机。在此背景下若能实现无人机像鸟类一样借助物体在空中栖息即停机悬停,将会极大地延长无人机侦察拍摄工作时间。
3.中国专利cn112937840b、公开日20220422,公开了一种多旋翼仿生栖息无人机与附着运动方法,属于机器人应用技术领域。栖息装置通过连接板固定于多旋翼无人机正上方,包括 n个对称安装的脚趾机构和动力系统;螺纹推杆电机正向或反向旋转带动栖息装置收缩或展开;上述脚趾机构包括卷曲脚掌、黏附材料、导向滚轮以及钩爪推杆;钩爪推杆第一端与螺纹法兰支架相铰接,导向滚轮安装于钩爪推杆第二端且始终与卷曲脚掌第二端下表面相切。该发明的栖息装置能空中充电,同时适应水平顶面、水平圆柱状面以及水平圆孔顶面,实现多旋翼无人机全天候多栖息功能。但是,其抓钩挂住水平圆柱时,由于抓钩并不位于整机重心上方,旋翼停机后机身会失去平衡因而发生大幅度晃动,晃动结束后机身成倾斜状态,此状态起飞难度非常大。其栖息装置对应的孔状、圆柱状栖息点由于尺寸和位置原因不具备常见性,应用条件具有局限性。其针对顶面栖息采用黏附方式,黏附方式对顶面平整度要求高,且黏附次数受限,多次黏附后黏附材料容易失效。其栖息装置重心较高,导致无人机稳定性不强。
4.中国专利cn110626514a、公开日20191231,公开了一种具有多种栖息结构的水陆两栖四旋翼无人机,包括无人机主体、锂电池盒、无刷电机、第三微型电机与电动伸缩杆,其特征在于:所述无人机主体的上表面通过螺丝固定有支撑台,所述无人机主体的下表面通过螺丝固定有锂电池盒,所述无人机主体的两侧皆通过螺丝固定有支撑套杆,所述支撑套杆的内侧设有支撑杆,所述支撑杆的顶端通过螺丝固定有夹爪主体,所述无人机主体的两侧皆通过螺丝固定有缓冲器,所述缓冲器的顶端设有第一连接架,所述缓冲器的底端设置有第二连接架。该发明能够内外夹持,增加夹持形态,提高使用范围,在长时间栖息时,具有机翼收缩防护结构,提高无人机使用寿命。但是,该栖息机构由于抓钩较小,用于抓住顶部圆筒形物体时需要抓钩预先到达离顶部圆筒形物体距离较近的位置,进而导致抓取过程对飞机稳定性和飞行位置精度要求较高,在实际应用中无人机容易受风的干扰而发生摆动,促使其抓取准确率下降。其抓取机构尺寸相对于无人机机身尺寸较小,而夹缝栖息场景通
常地形复杂且空间狭窄,因此机身容易与岩壁发生碰撞。其采用线绳驱动的方式驱动阻力比较大,对驱动电机的力矩要求较高,由于线绳长度较长,在拉力较大的情况下容易发生弹性伸长,使得抓钩握紧力不足而发生脱落。
5.中国专利cn112455661a、公开日20210309,公开了一种具备模块化柔性配置栖息触点的无人机,涉及航空领域,能够仅通过调整起落架和无人机的相对位姿来实现栖息,无需整体的改变无人机的飞行状态,操作快速简单。该发明包括:无人机、起落架、栖息触点模块、增材制造模块、相机。无人机底部安装起落架,起落架由一对或多对机械臂组成,起落架和无人机活动连接,起落架上安装栖息触点模块。无人机底部还安装相机和增材制造模块,增材制造模块的作业范围覆盖起落架的安装及活动范围。该发明通过栖息触点模块建立与周围结构的稳定接触,栖息平稳后无人机可以减慢或完全停止某些旋翼,大大增强的无人机的任务作业灵活性及作业时间。但是其起落架只能在机身下方运动,在抓握顶部圆柱杆类栖息点时,需要控制无人机反转180
°
使无人机底部朝上,这增大了无人机的控制难度。其单个起落架采用两个关节机械臂构成,增大了抓取控制难度,电机重量是困扰栖息机构减重的难点,多关节意味着多电机,进而增大了栖息机构的重量,增大了飞行功耗。其倒刺模块仅限于粗糙的墙面,倒刺附着点支点较小,容易脱落且常见墙面附着点不易支撑无人机的重量,容易导致附着点破坏,倒刺脱落。
6.中国专利cn102390528b、公开日20140108,公开了一种空中飞行和全方位吸附微型机器人,包括吸附装置、吸附关节臂、关节臂驱动舵机、四个旋翼、四个旋翼电机、四个驱动器、机器人本体、远程遥控器,吸附装置设置在吸附关节臂的一端,该吸附关节臂的另一端与关节臂驱动舵机的输出轴连接,该关节臂驱动舵机设置在舵机支架上,舵机支架固定安装在机器人本体的上面,四个旋翼固定安装在各自的旋翼电机上,四个驱动器分与各自的旋翼电机连接,远程遥控器发送控制命令给机器人本体实现空中飞行和全方位吸附。该发明基于四旋翼空中飞行,具有低空飞行稳定的特点,通过吸附装置使机器人拥有在空中物体表面栖息吸附的能力,实现了仿飞行生物飞行和栖息的机制。但是,其吸附模块具有一定的柔性,栖息后在风干扰下容易发生摆动,摆动后吸盘容易出现漏气,进而导致栖息脱落。其用于侧面栖息时,机身只有单臂支撑,阻力臂较大,容易使机身下坠,从而引发吸盘受力不均匀,容易发生脱落。其吸附过程需要涡轮工作产生负压,此过程涡轮电机耗电功率相对较大,节能效果不理想。
7.中国专利cn105836114a、公开日20160810,公开了一种多旋翼无人机,属于无人飞行器技术领域,包括机身、机臂、电机、旋翼、脚架等,其特点是:在机身上还设有有可折叠的吊架,该吊架包括挂勾、吊杆、底座,吊杆为可折叠的分段式结构,挂勾设置在吊杆的上端,底座设置在吊杆的下端,底座上设有连接口。在使用过程中,可以通过展开的吊架上的挂勾来将多旋翼无人机吊挂在高处的物体上。处于吊挂状态的多旋翼无人机无需电池电能提供升力,可以大大延长机载工作设备在一次起降过程中的工作时间。但是,其只限用于勾住顶部栖息点,适用场景单一。其只具备单个挂钩,栖息后在风的扰动下,无人机摆动幅度过大则会引发挂钩脱落。
技术实现要素:
8.为了解决现有技术中所存在的稳定性及可靠性差,或者在拉力较大时抓钩握紧力
不足,或者栖息条件严苛的不足,本发明提出了一种双栖息臂栖息无人机及自适应起落和栖息方法。
9.本发明提出的双栖息臂栖息无人机为对称结构,包括左栖息臂、右栖息臂和四旋翼无人机系统;其中:所述左栖息臂的上端与右栖息臂的上端分别与该四旋翼无人机系统的中间轴连接,构成了具有双栖息臂的四旋翼栖息无人机系统。
10.所述四旋翼无人机系统包括机架、四个旋翼模块、控制仓和云台相机,其中,所述四个旋翼模块分别套装在该机架的左前臂、右前臂、左后臂和右后臂的悬臂端。所述控制仓安装在该机架的中间轴的中段;云台相机安装在该控制仓下表面。
11.其特征在于:
12.所述机架安装在左栖息臂和右栖息臂的顶端;所述机架包括左前臂、右前臂、机架前三通连接件、中间轴、机架后三通连接件、左后臂、右后臂。所述左前臂和右前臂通过机架前三通连接件安装在该中间轴的一端,并使该左前臂的中心线和右前臂的中心线均与该中间轴的中心线之间的夹角为120
°
。所述左后臂和右后臂通过机架后三通连接件安装在该中间轴的另一端,并使该左后臂的中心线和右后臂的中心线均与该中间轴的中心线之间的夹角为 120
°
。连接后的所述左前臂、右前臂、左后臂和右后臂四者位于同一水平面。
13.所述左栖息臂包括左栖息臂支架、左栖息臂动力总成、左栖息臂前双钩爪和左栖息臂后双钩爪。
14.在该左栖息臂支架两根支杆的顶端分别固定有连接套筒,其中靠近机架前三通连接件一侧支杆的连接套筒内有左栖息臂短圆套筒,并使该连接套筒与左栖息臂短圆套筒过盈配合;靠近机架后三通连接件一侧支杆的连接套筒内安装有左栖息臂动力总成。在该左栖息臂支架的下端两根支杆的底端分别安装有左栖息臂前双钩爪和左栖息臂后双钩爪,并使所述左栖息臂前双钩爪靠近机架前三通连接件一侧,使左栖息臂后双钩爪靠近机架后三通连接件一侧。
15.所述右栖息臂包括右栖息臂支架、右栖息臂动力总成、右栖息臂前双钩爪和右栖息臂后双钩爪。在该右栖息臂支架的上端两根支杆的顶端分别固定有连接套筒,其中靠近机架后三通连接件一侧支杆的连接套筒内有右栖息臂短圆套筒,并使该连接套筒与右栖息臂短圆套筒过盈配合;靠近机架前三通连接件一侧支杆的连接套筒处安装有右栖息臂动力总成。在该右栖息臂支架的下端两根支杆的底端分别安装有右栖息臂前双钩爪和右栖息臂后双钩爪,并使所述右栖息臂前双钩爪靠近机架前三通连接件一侧,使左栖息臂后双钩爪靠近机架后三通连接件一侧。
16.所述左栖息臂动力总成包括第一卡环、左栖息臂短圆套筒、第二卡环、左栖息臂电机座、左栖息臂电机、第三卡环、左栖息臂主动齿轮、左栖息臂从动齿轮、左栖息臂长圆套筒和第四卡环。其中,左栖息臂长圆套筒套装在所述中间轴上,并使该左栖息臂长圆套筒的后端装入所述左栖息臂支架靠近机架后三通连接件一侧的连接套筒内;所述左栖息臂长圆套筒与连接套筒之间过盈配合。左栖息臂从动齿轮套装在该左栖息臂长圆套筒前端的外圆周表面,并使二者之间过盈配合。所述左栖息臂电机座套装并固定在该中间轴上。所述圆套套筒装在该中间轴上,并使二者之间转动配合。左栖息臂电机固定在该电机座的上表面;左栖息臂主动齿轮套装在所述左栖息臂电机的输出轴上,并与所述左栖息臂从动齿轮啮合。在所述中间轴上套装有第一卡环和第二卡环,并使所述第一卡环和第二卡环分别位于该左栖
息臂短圆套筒的两端,以限制该左栖息臂短圆套筒的轴向窜动。在所述中间轴上套装有第三卡环和第四卡环,并使所述第三卡环和第四卡环分别位于该左栖息臂长圆套筒的两端,以限制该左栖息臂长圆套筒的轴向窜动。
17.所述右栖息臂动力总成包括右栖息臂电机、右栖息臂电机座、第五卡环、右栖息臂从动齿轮、右栖息臂主动齿轮、右栖息臂长圆套筒、第六卡环、第七卡环、右栖息臂短圆套筒和第八卡环。其中,右栖息臂长圆套筒套装在所述中间轴上,并使该右栖息臂长圆套筒的后端装入所述右栖息臂支架靠近机架前三通连接件一侧的连接套筒内;所述右栖息臂长圆套筒与连接套筒之间过盈配合。右栖息臂从动齿轮套装在该圆套筒前端的外圆周表面,并使二者之间过盈配合。所述右栖息臂电机座套装并固定在该中间轴上。所述圆套套筒装在该中间轴上,并使二者之间转动配合。右栖息臂电机固定在该电机座的上表面;右栖息臂主动齿轮套装在所述右栖息臂电机的输出轴上,并与所述右栖息臂从动齿轮啮合。在所述中间轴上套装有第七卡环和第八卡环,并使所述第七卡环和第八卡环分别位于右栖息臂短圆套筒的两端,以限制该右栖息臂短圆套筒的轴向窜动。第五卡环和第六卡环套装在所述中间轴上,并位于右栖息臂长圆套筒的两端,以限制该右栖息臂长圆套筒的轴向窜动。
18.所述左栖息臂前双钩爪包括第一外爪、左栖息臂前双钩爪三通连接件和第一内爪;所述左栖息臂前双钩爪三通连接件的内孔与第一内爪连接,外孔与第一外爪连接,中间孔与左栖息臂支架连接。
19.所述左栖息臂后双钩爪包括第二外爪、左栖息臂后双钩爪三通连接件和第二内爪;所述左栖息臂后双钩爪三通连接件的内孔与第二内爪连接,外孔与第二外爪连接,中间孔与左栖息臂支架连接。
20.所述右栖息臂前双钩爪包括第三外爪、右栖息臂前双钩爪三通连接件和第三内爪;所述右栖息臂前双钩爪三通连接件的内孔与第三内爪连接,外孔与第三外爪连接,中间孔与右栖息臂支架连接。
21.所述右栖息臂后双钩爪包括第四外爪、右栖息臂后双钩爪三通连接件和第四内爪;所述右栖息臂后双钩爪三通连接件的内孔与第四内爪连接,外孔与第四外爪连接,中间孔与所述右栖息臂支架连接。
22.所述左栖息臂的工作过程是:但所述左栖息臂电机驱动左栖息臂主动齿轮逆时针旋转,左栖息臂主动齿轮带动左栖息臂从动齿轮顺时针转动,左栖息臂从动齿轮带动左臂支架绕中间轴顺时针旋转,则左栖息臂前双钩爪与左栖息臂后双钩爪抬升,称为左栖息臂抬升。
23.当左栖息臂电机驱动左栖息臂主动齿轮顺时针旋转,左栖息臂主动齿轮带动左栖息臂从动齿轮逆时针转动,左栖息臂从动齿轮带动左臂支架绕中间轴逆时针旋转,则左栖息臂前双钩爪与左栖息臂后双钩爪下降,称为左栖息臂下降。
24.所述右栖息臂的工作过程是:
25.当所述右栖息臂电机驱动右栖息臂主动齿轮顺时针旋转,右栖息臂主动齿轮带动右栖息臂从动齿轮逆时针转动,右栖息臂从动齿轮带动右臂支架绕中间轴逆时针旋转,则右栖息臂前双钩爪与右栖息臂后双钩爪抬升,称为右栖息臂抬升。
26.当右栖息臂电机驱动右栖息臂主动齿轮逆时针旋转,右栖息臂主动齿轮带动右栖息臂从动齿轮顺时针转动,右栖息臂从动齿轮带动右臂支架绕中间轴顺时针旋转,则右栖
息臂前双钩爪与右栖息臂后双钩爪下降,称为右栖息臂下降。
27.本发明提出的所述双栖息臂栖息无人机的自适应起落方法,包括水平面起飞降落运动、倾斜表面起飞降落运动和凹凸不平表面的起飞降落运动,其特征在于,通过控制该左栖息臂的展开角和右栖息臂的展开角实现自适应起落。所述展开角是以机架对称面为基准,左栖息臂与该机架对称面的夹角为左栖息臂展开角θ1,右栖息臂与该机架对称面的夹角为右栖息臂展开角θ2。具体过程是:
28.第一种,当该双栖息臂栖息无人机在水平面起飞降落运动时:
29.在所述水平面起飞降落时:
[0030]ⅰ双栖息臂栖息无人机起飞:
[0031]
通过电机驱动所述齿轮,带动该左栖息臂转动至该左栖息臂展开角θ1=30
°
,使所述第一内爪与第二内爪均与水平面平行。
[0032]
同时,通过电机驱动所述齿轮,带动该右栖息臂转动至该右栖息臂展开角θ2=30
°
,使所述第三内爪与第四内爪均与地面平行。
[0033]
将该双栖息臂栖息无人机放置在该水平面上,使四旋翼无人机系统保持水平状态。
[0034]
启动分别位于所述左前臂、右前臂、右后臂和左前臂四者上的旋翼模块中的电机,使所述四旋翼无人机系统中的各旋翼工作,该双栖息臂栖息无人机在水平面起飞。
[0035]ⅱ双栖息臂栖息无人机降落:
[0036]
保持所述左栖息臂的展开角θ1=30
°
,使所述第一内爪与第二内爪均与平面平行。
[0037]
保持所述右栖息臂的展开角θ2=30
°
,使所述第三内爪与第四内爪均与平面平行。
[0038]
降低分别位于所述左前臂、右前臂、右后臂和左前臂四者上的旋翼模块中的电机的功率,使该双栖息臂栖息无人机平稳降落在水平面上。
[0039]
至此,完成所述双栖息臂栖息无人机在水平面上的起飞与降落。
[0040]
第二种,当该双栖息臂栖息无人机在倾斜表面起飞降落运动时:
[0041]
所述倾斜表面的倾斜度为θ5,0
°
<θ5<30
°
。
[0042]
在所述倾斜表面起飞降落时:
[0043]ⅰ双栖息臂栖息无人机起飞:
[0044]
通过电机驱动所述齿轮,带动该左栖息臂转动至该左栖息臂展开角θ1=(30
°‑
θ5),并使所述第一内爪与第二内爪均与该倾斜表面平行。
[0045]
同时,通过电机驱动所述齿轮,带动该右栖息臂转动至该右栖息臂展开角θ2=(30
°
θ5),使所述第三内爪与第四内爪均与该倾斜表面平行。
[0046]
将该双栖息臂栖息无人机放置在该倾斜表面上,并使四旋翼无人机系统保持水平状态。
[0047]
启动分别位于所述左前臂、右前臂、右后臂和左前臂四者上的旋翼模块中的电机,使所述四旋翼无人机系统中的各旋翼工作,该双栖息臂栖息无人机在倾斜表面起飞。
[0048]ⅱ双栖息臂栖息无人机降落:
[0049]
保持所述左栖息臂的展开角θ1=(30
°‑
θ5),使所述第一内爪与第二内爪均与倾斜表面平行。
[0050]
保持所述右栖息臂的展开角θ2=3(30
°
θ5),使所述第三内爪与第四内爪均与倾斜
表面平行。
[0051]
降低分别位于所述左前臂、右前臂、右后臂和左前臂四者上的旋翼模块中的电机的功率,使该双栖息臂栖息无人机平稳降落在倾斜表面上。
[0052]
至此,完成所述双栖息臂栖息无人机在倾斜表面上的起飞与降落。
[0053]
第三种,当该双栖息臂栖息无人机在台阶面的起飞降落运动时:
[0054]
设所述台阶面的高低落差为h。0.1t<h<1.5t;所述t是右栖息臂的长度。
[0055]
设所述右栖息臂上的第四内爪的末端与高面的接触点为z,右栖息臂围绕所述中间轴旋转。所述中间轴的中心线与该接触点z之间的连线oz与所述机架对称面之间的夹角为θ3;所述连线oz与右栖息臂支架之间的夹角为θ4。
[0056]
在所述台阶面起飞降落时:
[0057]ⅰ双栖息臂栖息无人机起飞:
[0058]
通过电机驱动所述齿轮,带动该左栖息臂转动至左栖息臂展开角θ1=30
°
。
[0059]
通过电机驱动所述齿轮,带动该右栖息臂旋转至右栖息臂展开角θ2=θ3 θ4。
[0060]
将该双栖息臂栖息无人机放置在该台阶面上,使所述第一内爪与第二内爪均与低面平行并落到低面上,使第三内爪与第四内爪两者的末端落在高面上,使四旋翼无人机系统保持水平。
[0061]
启动分别位于所述左前臂、右前臂、右后臂和左前臂四者上的旋翼模块中的电机,使所述四旋翼无人机系统中的各旋翼工作,该双栖息臂栖息无人机在台阶面起飞。
[0062]ⅱ双栖息臂栖息无人机降落:
[0063]
保持所述左栖息臂的展开角θ1=30
°
。
[0064]
保持所述右栖息臂的展开角θ2=θ3 θ4。
[0065]
降低分别位于所述左前臂、右前臂、右后臂和左前臂四者上的旋翼模块中的电机的功率,使所述第一内爪与第二内爪均与低面平行并落到低面上,使所述第三内爪与第四内爪的末端均落到高面上,使四旋翼无人机系统保持水平。
[0066]
至此,完成所述双栖息臂栖息无人机在水平面、倾斜表面和台阶面的起飞降落。
[0067]
本发明提出所述双栖息臂栖息无人机的栖息过程根据不同的栖息条件,分为侧面避雷带栖息、顶面圆柱栖息和倒挂狭缝栖息。
[0068]
具体过程是:
[0069]
第一种,侧面避雷带栖息方法:
[0070]
所述侧面避雷带位于楼顶女儿墙上。具体过程是:
[0071]
第一步,双栖息臂栖息无人机起飞。
[0072]
第二步,左栖息臂旋转至左栖息臂展开角θ1=120
°
;同时,右栖息臂旋转至右栖息臂展开角θ2=120
°
。
[0073]
第三步,双栖息臂栖息无人机飞至楼顶的女儿墙外侧上方1m处。
[0074]
第四步,双栖息臂栖息无人机下降,直到右栖息臂的第三内爪与第四内爪均挂住女儿墙上的避雷带。
[0075]
第五步,双栖息臂栖息无人机保持不动,左栖息臂逆时针旋转,直到左栖息臂的第一内爪与第二内爪接触到女儿墙面。
[0076]
第六步,左栖息臂电机与右栖息臂电机均锁死,使所述左栖息臂与右栖息臂不能
发生旋转。在左栖息臂、右栖息臂、避雷带与女儿墙四者之间形成稳定的三角形。四旋翼无人机系统保持水平。
[0077]
第七步,所有旋翼模块停机,以节省电能,云台相机继续对地面进行拍摄作业。
[0078]
第八步,当所述双栖息臂栖息无人机完成空中作业需要飞离该栖息点时,其飞离过程是:
[0079]
ⅰ
所有旋翼模块工作并产生升力,使该双栖息臂栖息无人机悬停。
[0080]
ⅱ
所述左栖息臂电机解锁;左栖息臂顺时针转动,直到θ1>0
°
。
[0081]
ⅲ
双栖息臂栖息无人机竖直向上飞行至安全高度;同时,左栖息臂继续顺时针转动至θ1=120
°
后停止。侧面避雷带栖息完成。
[0082]
第二种,顶面圆柱栖息:
[0083]
所述顶面圆柱栖息中,该圆柱形栖息点位于该双栖息臂栖息无人机上方。具体过程是:
[0084]
第一步,双栖息臂栖息无人机起飞。
[0085]
第二步,双栖息臂栖息无人机飞至该顶面圆柱下方1m处。
[0086]
第三步,左栖息臂抬升至左栖息臂展开角θ1=150
°
;同时,右栖息臂抬升至右栖息臂展开角θ2=150
°
。
[0087]
第四步,双栖息臂栖息无人机上升,直到所述左栖息臂的第一外爪和第二外爪均高于所述顶面圆柱,并且右栖息臂的第三外爪和第四外爪均高于顶面圆柱。
[0088]
第五步,双栖息臂栖息无人机停止上升。
[0089]
第六步,左栖息臂抬升至左栖息臂展开角θ1=170
°
。同时,右栖息臂抬升至右栖息臂展开角θ2=170
°
,此时左栖息臂与右栖息臂将顶面圆柱完全抱住。
[0090]
第七步,四旋翼无人机系统下降,直到左栖息臂的第一外爪和第二外爪均挂靠所述顶面圆柱,并且右栖息臂的第三外爪和第四外爪均挂靠所述顶面圆柱。此时四旋翼无人机系统保持水平。
[0091]
第八步,所有旋翼模块停机以节省电能,云台相机继续对地面进行拍摄。
[0092]
顶面圆柱栖息后无需将左栖息臂电机与右栖息臂电机锁死,通过左栖息臂与右栖息臂两者的结构牢固挂住顶面圆柱,该栖息方法更加节省电能。
[0093]
第九步,当所述双栖息臂栖息无人机完成空中作业需要飞离该栖息点时,其飞离过程是:
[0094]
ⅰ
所有旋翼模块工作,使双栖息臂栖息无人机向竖直向上方向飞行10
㎝
。
[0095]
ⅱ
左栖息臂下降至左栖息臂展开角θ1=150
°
,同时,右栖息臂下降至右栖息臂展开角θ2=150
°
。
[0096]
ⅲ
双栖息臂栖息无人机下降至安全高度。顶面圆柱栖息完成。
[0097]
第三种,倒挂狭缝栖息:
[0098]
所述倒挂狭缝栖息中,该狭缝位于该双栖息臂栖息无人机上方。
[0099]
第一步,双栖息臂栖息无人机起飞。
[0100]
第二步,左栖息臂抬升至左栖息臂展开角θ1=170
°
,同时,右栖息臂抬升至右栖息臂展开角θ2=170
°
。
[0101]
第三步,双栖息臂栖息无人机飞至狭缝顶面下方1m处。
[0102]
第四步,双栖息臂栖息无人机上升,左栖息臂与右栖息臂穿过狭缝,直到左栖息臂的第一内爪与第二内爪均高于狭缝顶面10cm,直到右栖息臂的第三内爪与第四内爪均高于狭缝顶面10cm。
[0103]
第五步,双栖息臂栖息无人机停止上升并保持悬停。
[0104]
第六步,左栖息臂下降至第一内爪与第二内爪均与狭缝顶面接触,同时,右栖息臂下降至第三内爪与第四内爪均与狭缝顶面接触。此时左栖息臂与右栖息臂倒挂住狭缝顶面。
[0105]
第七步,左栖息臂电机与右栖息臂电机均锁死,左栖息臂与右栖息臂不能发生旋转。此时双栖息臂栖息无人机保持水平。
[0106]
第八步,所有旋翼模块停机以节省电能,云台相机继续对地面进行拍摄。
[0107]
第九步,当所述双栖息臂栖息无人机完成空中作业需要飞离该栖息点时,其飞离过程是:
[0108]
ⅰ
所有旋翼模块工作产生升力,使该双栖息臂栖息无人机保持悬停。
[0109]
ⅱ
左栖息臂抬升至左栖息臂展开角θ1=170
°
,同时,右栖息臂抬升至右栖息臂展开角θ2=170
°
。
[0110]
ⅲ
双栖息臂栖息无人机下降至安全高度。倒挂狭缝栖息完成。
[0111]
至此,完成所述双栖息臂栖息无人机侧面避雷带、顶面圆柱和倒挂狭缝不同条件下的栖息
[0112]
与现有技术相比,本发明具有如下优点:
[0113]
1、本发明能够实现侧面避雷带栖息,这是目前现有技术尚未利用的栖息点,而该栖息点常见,而且该栖息点具有高度高,特征形状明显,特征形状固定的优势。本发明在侧面避雷带栖息后稳定性强,左右栖息臂与墙体构成稳定的三角形,受风干扰因素小。
[0114]
2、本发明同时具备在侧面避雷带栖息、顶面圆柱栖息、狭缝倒挂栖息三种栖息能力,具有良好的城市复杂环境适应能力。
[0115]
3、本发明结构和驱动方式简单可靠,单个栖息臂只需要一个电机即可驱动,相比于多电机多关节机械臂,在满足同样功能的同时减轻了整体重量。每个栖息臂旋转角度大,栖息臂长,使得栖息臂抓取范围大,具有更大的容错性,抓取成功率高。
[0116]
4、本发明可实现自适应起飞和降落,左右栖息臂根据地面特征,主动调整栖息臂展开角度,实现机身在起飞和降落过程始终保持水平,提升了无人机起飞和降落过程的稳定性。
[0117]
5、本发明在顶面圆柱栖息后稳定性强,左右栖息臂将圆柱环抱住,双钩爪将圆柱钩住,有效防止挂钩脱落。左右栖息臂对称分布,在抓取顶面圆柱后机身重心不会偏移,可保持无人机始终水平,有效避免栖息后重心倾斜。在顶面圆柱栖息后栖息臂电机可断电不工作,降低了电能消耗。
附图说明
[0118]
图1是本发明的轴测示意图。
[0119]
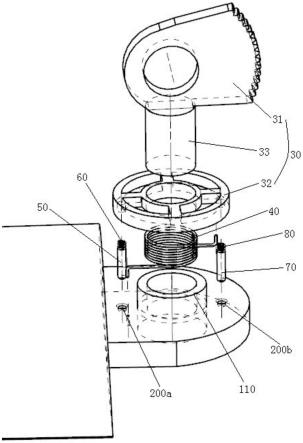
图2是栖息机构的结构示意图。
[0120]
图3是四旋翼无人机系统的结构示意图。
[0121]
图4是左栖息臂整体的结构示意图。
[0122]
图5是右栖息臂整体的结构示意图。
[0123]
图6是左栖息臂零件爆炸图。
[0124]
图7是右栖息臂零件爆炸图。
[0125]
图8是机架的结构示意图。
[0126]
图9是左栖息臂前双钩爪三通连接件的结构示意图。
[0127]
图10是机架前三通连接件的结构示意图。
[0128]
图11是左栖息臂展开角θ1与右栖息臂展开角θ2的示意图。
[0129]
图12是双栖息臂栖息无人机在水平面起飞降落示意图。
[0130]
图13是双栖息臂栖息无人机在倾斜表面起飞降落示意图。
[0131]
图14是双栖息臂栖息无人机在台阶面的起飞降落示意图。
[0132]
图15是侧面避雷带栖息中第二步与第三步的示意图。
[0133]
图16是侧面避雷带栖息中第四步的示意图。
[0134]
图17是侧面避雷带栖息中第五步的示意图。
[0135]
图18是侧面避雷带栖息中第六步与第七步的示意图。
[0136]
图19是侧面避雷带栖息中第八步
ⅰ
与第八步
ⅱ
的示意图。
[0137]
图20是侧面避雷带栖息中第八步
ⅲ
的示意图。
[0138]
图21是顶面圆柱栖息中第一步与第二步的示意图。
[0139]
图22是顶面圆柱栖息中第三步与第四步的示意图。
[0140]
图23是顶面圆柱栖息中第五步与第六步的示意图。
[0141]
图24是顶面圆柱栖息中第七步与第八步的示意图。
[0142]
图25是顶面圆柱栖息中第九步
ⅰ
的示意图。
[0143]
图26是顶面圆柱栖息中第九步
ⅱ
的示意图。
[0144]
图27是顶面圆柱栖息中第九步
ⅲ
的示意图。
[0145]
图28是倒挂狭缝栖息中第一步、第二步与第三步的示意图。
[0146]
图29是倒挂狭缝栖息中第四步与第五步的示意图。
[0147]
图30是倒挂狭缝栖息中第六步、第七步与第八步的示意图。
[0148]
图31是倒挂狭缝栖息中第九步
ⅰ
的示意图。
[0149]
图32是倒挂狭缝栖息中第九步
ⅱ
的示意图。
[0150]
图33是a局部剖与b局部剖位置示意图。
[0151]
图34是a局部剖视图。
[0152]
图35是b局部剖视图。
[0153]
图36是机架对称面示意图。
[0154]
图中:1.左栖息臂;2.右栖息臂;3.四旋翼无人机系统;4.左栖息臂支架;5.左栖息臂前双钩爪;6.左栖息臂后双钩爪;7.左栖息臂动力总成;8.右栖息臂支架;9.右栖息臂前双钩爪;10.右栖息臂后双钩爪;11.右栖息臂动力总成;12.第一外爪;13.左栖息臂前双钩爪三通连接件;14.第一内爪;15.第二外爪;16.左栖息臂后双钩爪三通连接件;17第二内爪; 18.机架;19.第三外爪;20.右栖息臂前双钩爪三通连接件;21第三内爪;22.第四外爪;23. 右栖息臂后双钩爪三通连接件;24第四内爪;25.第一卡环;26.左栖息臂短圆套筒;27.
第二卡环;28.左栖息臂电机座;29.左栖息臂电机;30.第三卡环;31.左栖息臂主动齿轮;32. 左栖息臂从动齿轮;33.左栖息臂长圆套筒;34.第四卡环;35.右栖息臂电机;36.右栖息臂电机座;37.第五卡环;38.右栖息臂从动齿轮;39.右栖息臂主动齿轮;40.右栖息臂长圆套筒;41.第六卡环;42.第七卡环;43.右栖息臂短圆套筒;44.第八卡环;45.左前臂;46.右前臂;47.机架前三通连接件;48.中间轴;49.机架后三通连接件;50.左后臂;51.右后臂; 52.旋翼模块;53.控制仓;54.云台相机;55.机架对称面。
具体实施方式
[0155]
本实施例是一种具有双栖息臂的栖息无人机,为对称结构,并以该无人机的飞行方向将该无人机的分为左侧和右侧,位于该左侧的零部件称为左栖息臂、左栖息臂支架、左栖息臂前双钩爪、左栖息臂后双钩爪、左栖息臂动力总成、左栖息臂短圆套筒、左栖息臂电机座、左栖息臂电机、左栖息臂主动齿轮、左栖息臂从动齿轮、左栖息臂长圆套筒、左前臂和左后臂;位于该右侧的零部件称为右栖息臂、右栖息臂支架、右栖息臂前双钩爪、右栖息臂后双钩爪、右栖息臂动力总成、右栖息臂电机、右栖息臂电机座、右栖息臂从动齿轮、右栖息臂主动齿轮、右栖息臂长圆套筒、右栖息臂短圆套筒;右前臂和右后臂。
[0156]
本实施例包括左栖息臂1、右栖息臂2和四旋翼无人机系统3;其中:所述左栖息臂的上端与右栖息臂的上端分别与该四旋翼无人机系统的中间轴连接,构成了具有双栖息臂的四旋翼栖息无人机系统。
[0157]
所述四旋翼无人机系统3包括机架18、四个旋翼模块52、控制仓53和云台相机54,其中,所述四个旋翼模块分别套装在该机架的左前臂45、右前臂46、左后臂50和右后臂51的悬臂端。所述控制仓53安装在该机架的中间轴48的中段;云台相机54安装在该控制仓下表面。
[0158]
所述机架18包括左前臂45、右前臂46、机架前三通连接件47、中间轴48、机架后三通连接件49、左后臂50、右后臂51。所述左前臂和右前臂通过机架前三通连接件安装在该中间轴的一端,并使该左前臂的中心线和右前臂的中心线均与该中间轴的中心线之间的夹角为 120
°
。所述左后臂和右后臂通过机架后三通连接件安装在该中间轴的另一端,并使该左后臂的中心线和右后臂的中心线均与该中间轴的中心线之间的夹角为120
°
。连接后的所述左前臂45、右前臂46、左后臂50和右后臂51四者位于同一水平面。所述机架中的所述旋翼模块 52、控制仓53和云台相机54三者均采用现有技术。
[0159]
为适合与所述左栖息臂1和右栖息臂2的装配,本实施例对该机架18的形状和尺寸进行改进,包括:1、将机架整体的长度和宽度比改为8:5,以保证该左栖息臂和右栖息臂与旋翼模块52之间不发生干涉;2、为了避免中间轴48长度太长而导致中间轴变形量过大,增加了机架前三通连接件47与机架后三通连接件49,通过该机架前三通连接件与机架后三通连接件,增加了左前臂、右前臂、右后臂和左前臂45四者的长度,从而减小了中间轴的长度,进而减小中间轴的变形量。所述机架前三通连接件47与机架后三通连接件49的结构相同。
[0160]
所述左栖息臂1包括左栖息臂支架4、左栖息臂动力总成7、左栖息臂前双钩爪5和左栖息臂后双钩爪6。所述左栖息臂支架包括两根等长的支杆和两根横撑杆,通过所述两根横撑杆将两根支杆连接,并使该两根支杆相互平行。在该左栖息臂支架4的上端两根支杆的顶端分别固定有连接套筒,其中靠近机架前三通连接件47一侧支杆的连接套筒内有左栖息
臂短圆套筒26,并使该连接套筒与圆套筒过盈配合;靠近机架后三通连接件49一侧支杆的连接套筒内安装有左栖息臂动力总成7。在该左栖息臂支架4的下端两根支杆的底端分别安装有左栖息臂前双钩爪5和左栖息臂后双钩爪6,并使所述左栖息臂前双钩爪靠近机架前三通连接件47一侧,使左栖息臂后双钩爪靠近机架后三通连接件49一侧。
[0161]
所述左栖息臂动力总成7包括第一卡环25、左栖息臂短圆套筒26、第二卡环27、左栖息臂电机座28、左栖息臂电机29、第三卡环30、左栖息臂主动齿轮31、左栖息臂从动齿轮 32、左栖息臂长圆套筒33和第四卡环34。其中,左栖息臂长圆套筒33套装在所述中间轴上,并使该圆套筒的后端装入所述左栖息臂支架靠近机架后三通连接件49一侧的连接套筒内;所述圆套筒与连接套筒之间过盈配合。左栖息臂从动齿轮32套装在该圆套筒前端的外圆周表面,并使二者之间过盈配合。所述左栖息臂电机座28套装并固定在该中间轴上。所述圆套筒 26套装在该中间轴上,并使二者之间转动配合。左栖息臂电机29固定在该电机座的上表面;左栖息臂主动齿轮31套装在所述左栖息臂电机的输出轴上,并与所述左栖息臂从动齿轮32 啮合。在所述中间轴上套装有第一卡环25和第二卡环27,并使所述第一卡环25和第二卡环 27分别位于该左栖息臂短圆套筒26的两端,以限制该左栖息臂短圆套筒的轴向窜动。在所述中间轴上套装有第三卡环30和第四卡环34,并使所述第三卡环30和第四卡环34分别位于该左栖息臂长圆套筒33的两端,以限制该左栖息臂长圆套筒的轴向窜动。
[0162]
所述左栖息臂前双钩爪5包括第一外爪12、左栖息臂前双钩爪三通连接件13和第一内爪14;所述左栖息臂前双钩爪三通连接件13的内孔与第一内爪14连接,外孔与第一外爪12 连接,中间孔与左栖息臂支架4连接。
[0163]
所述左栖息臂后双钩爪6包括第二外爪15、左栖息臂后双钩爪三通连接件16和第二内爪17;所述左栖息臂后双钩爪三通连接件16的内孔与第二内爪17连接,外孔与第二外爪15 连接,中间孔与左栖息臂支架4连接。
[0164]
所述右栖息臂2包括右栖息臂支架8、右栖息臂动力总成11、右栖息臂前双钩爪9和右栖息臂后双钩爪10。所述右栖息臂支架包括两根等长的支杆和两根横撑杆,通过所述两根横撑杆将两根支杆连接,并使该两根支杆相互平行。在该右栖息臂支架8的上端两根支杆的顶端分别固定有连接套筒,其中靠近机架后三通连接件49一侧支杆的连接套筒内有右栖息臂短圆套筒43,并使该连接套筒与右栖息臂短圆套筒过盈配合;靠近机架前三通连接件47一侧支杆的连接套筒处安装有右栖息臂动力总成11。在该右栖息臂支架8的下端两根支杆的底端分别安装有右栖息臂前双钩爪9和右栖息臂后双钩爪10,并使所述右栖息臂前双钩爪靠近机架前三通连接件47一侧,使左栖息臂后双钩爪靠近机架后三通连接件49一侧。
[0165]
所述左栖息臂支架4与右栖息臂支架8的支杆长度相等。
[0166]
所述右栖息臂动力总成11包括右栖息臂电机35、右栖息臂电机座36、第五卡环37、右栖息臂从动齿轮38、右栖息臂主动齿轮39、右栖息臂长圆套筒40、第六卡环41、第七卡环 42、右栖息臂短圆套筒43和第八卡环44。其中,右栖息臂长圆套筒40套装在所述中间轴上,并使该圆套筒的后端装入所述右栖息臂支架靠近机架前三通连接件47一侧的连接套筒内;所述圆套筒与连接套筒之间过盈配合。右栖息臂从动齿轮38套装在该圆套筒前端的外圆周表面,并使二者之间过盈配合。所述右栖息臂电机座36套装并固定在该中间轴上。所述圆套筒 43套装在该中间轴上,并使二者之间转动配合。右栖息臂电机35固定在该电机座的上表面;右栖息臂主动齿轮39套装在所述右栖息臂电机35的输出轴上,并与所述右栖息臂从动
齿轮 38啮合。在所述中间轴上套装有第七卡环42和第八卡环44,并使所述第七卡环42和第八卡环44分别位于右栖息臂短圆套筒43的两端,以限制该右栖息臂短圆套筒的轴向窜动。第五卡环37和第六卡环41套装在所述中间轴上,并位于右栖息臂长圆套筒40的两端,以限制该右栖息臂长圆套筒的轴向窜动。
[0167]
所述第一卡环25、第二卡环27、第三卡环30、第四卡环34、第五卡环37、第六卡环41、第七卡环42和第八卡环44的结构相同。
[0168]
所述右栖息臂前双钩爪9包括第三外爪19、右栖息臂前双钩爪三通连接件20和第三内爪21;所述右栖息臂前双钩爪三通连接件20的内孔与第三内爪21连接,外孔与第三外爪19 连接,中间孔与右栖息臂支架8连接。
[0169]
所述右栖息臂后双钩爪10包括第四外爪22、右栖息臂后双钩爪三通连接件23和第四内爪24;所述右栖息臂后双钩爪三通连接件23的内孔与第四内爪24连接,外孔与第四外爪22 连接,中间孔与所述右栖息臂支架8连接。
[0170]
所述左栖息臂前双钩爪三通连接件13、左栖息臂后双钩爪三通连接件16、右栖息臂前双钩爪三通连接件20和右栖息臂后双钩爪三通连接件23的结构相同。
[0171]
所述第一内爪14、第二内爪17、第三内爪21、第四内爪24、第一外爪12、第二外爪15、第三外爪19和四外爪22的结构相同。
[0172]
工作时:
[0173]
左栖息臂1的左栖息臂电机29驱动左栖息臂主动齿轮31逆时针旋转,左栖息臂主动齿轮31带动左栖息臂从动齿轮32顺时针转动,左栖息臂从动齿轮32带动左臂支架4绕中间轴 48顺时针旋转,则左栖息臂前双钩爪5与左栖息臂后双钩爪6抬升,称为左栖息臂抬升。
[0174]
左栖息臂1的左栖息臂电机29驱动左栖息臂主动齿轮31顺时针旋转,左栖息臂主动齿轮31带动左栖息臂从动齿轮32逆时针转动,左栖息臂从动齿轮32带动左臂支架4绕中间轴 48逆时针旋转,则左栖息臂前双钩爪5与左栖息臂后双钩爪6下降,称为左栖息臂下降。
[0175]
右栖息臂2的右栖息臂电机35驱动右栖息臂主动齿轮39顺时针旋转,右栖息臂主动齿轮39带动右栖息臂从动齿轮38逆时针转动,右栖息臂从动齿轮38带动右臂支架18绕中间轴48逆时针旋转,则右栖息臂前双钩爪9与右栖息臂后双钩爪10抬升,称为右栖息臂抬升。
[0176]
右栖息臂2的右栖息臂电机35驱动右栖息臂主动齿轮39逆时针旋转,右栖息臂主动齿轮39带动右栖息臂从动齿轮38顺时针转动,右栖息臂从动齿轮38带动右臂支架18绕中间轴48顺时针旋转,则右栖息臂前双钩爪9与右栖息臂后双钩爪10下降,称为右栖息臂下降。
[0177]
所述双栖息臂栖息无人机的自适应起落包括水平面起飞降落运动、倾斜表面起飞降落运动和凹凸不平表面的起飞降落运动。所述双栖息臂栖息无人机通过控制该左栖息臂的展开角和右栖息臂的展开角实现自适应起落。所述展开角是以机架对称面55为基准,左栖息臂1与该机架对称面的夹角为左栖息臂展开角θ1,右栖息臂2与该机架对称面的夹角为右栖息臂展开角θ2。
[0178]
其具体过程是:
[0179]
第一种,当该双栖息臂栖息无人机在水平面起飞降落运动时:
[0180]
在所述水平面起飞降落时:
[0181]ⅰ双栖息臂栖息无人机起飞:
[0182]
通过电机驱动所述齿轮,带动该左栖息臂1转动至该左栖息臂展开角θ1=30
°
,使所述第一内爪14与第二内爪17均与水平面平行。
[0183]
同时,通过电机驱动所述齿轮,带动该右栖息臂2转动至该右栖息臂展开角θ2=30
°
,使所述第三内爪21与第四内爪24均与地面平行。
[0184]
将该双栖息臂栖息无人机放置在该水平面上,使四旋翼无人机系统3保持水平状态。
[0185]
启动分别位于所述左前臂、右前臂、右后臂和左前臂四者上的旋翼模块52中的电机,使所述四旋翼无人机系统中的各旋翼工作,该双栖息臂栖息无人机在水平面起飞。
[0186]ⅱ双栖息臂栖息无人机降落:
[0187]
保持所述左栖息臂1的展开角θ1=30
°
,使所述第一内爪14与第二内爪17均与平面平行。
[0188]
保持所述右栖息臂2的展开角θ2=30
°
,使所述第三内爪21与第四内爪24均与平面平行。
[0189]
降低分别位于所述左前臂、右前臂、右后臂和左前臂四者上的旋翼模块52中的电机的功率,使该双栖息臂栖息无人机平稳降落在水平面上。
[0190]
至此,完成所述双栖息臂栖息无人机在水平面上的起飞与降落。
[0191]
第二种,当该双栖息臂栖息无人机在倾斜表面起飞降落运动时:
[0192]
所述倾斜表面的倾斜度为θ5,0
°
<θ5<30
°
。
[0193]
在所述倾斜表面起飞降落时:
[0194]ⅰ双栖息臂栖息无人机起飞:
[0195]
通过电机驱动所述齿轮,带动该左栖息臂1转动至该左栖息臂展开角θ1=(30
°‑
θ5),并使所述第一内爪14与第二内爪17均与该倾斜表面平行。
[0196]
同时,通过电机驱动所述齿轮,带动该右栖息臂2转动至该右栖息臂展开角θ2=(30
°
θ5),使所述第三内爪21与第四内爪24均与该倾斜表面平行。
[0197]
将该双栖息臂栖息无人机放置在该倾斜表面上,并使四旋翼无人机系统3保持水平状态。
[0198]
启动分别位于所述左前臂、右前臂、右后臂和左前臂四者上的旋翼模块52中的电机,使所述四旋翼无人机系统中的各旋翼工作,该双栖息臂栖息无人机在倾斜表面起飞。
[0199]ⅱ双栖息臂栖息无人机降落:
[0200]
保持所述左栖息臂1的展开角θ1=(30
°‑
θ5),使所述第一内爪14与第二内爪17均与倾斜表面平行。
[0201]
保持所述右栖息臂2的展开角θ2=3(30
°
θ5),使所述第三内爪21与第四内爪24均与倾斜表面平行。
[0202]
降低分别位于所述左前臂、右前臂、右后臂和左前臂四者上的旋翼模块52中的电机的功率,使该双栖息臂栖息无人机平稳降落在倾斜表面上。
[0203]
至此,完成所述双栖息臂栖息无人机在倾斜表面上的起飞与降落。
[0204]
第三种,当该双栖息臂栖息无人机在台阶面的起飞降落运动时:
[0205]
设所述台阶面的高低落差为h。0.1t<h<1.5t;所述t是右栖息臂的长度。
[0206]
设所述右栖息臂2上的第四内爪24的末端与高面的接触点为z,右栖息臂2围绕所述中间轴旋转。所述中间轴的中心线与该接触点z之间的连线oz与所述机架对称面55之间的夹角为θ3;所述连线oz与右栖息臂支架8之间的夹角为θ4。
[0207]
在所述台阶面起飞降落时:
[0208]ⅰ双栖息臂栖息无人机起飞:
[0209]
通过电机驱动所述齿轮,带动该左栖息臂1转动至左栖息臂展开角θ1=30
°
。
[0210]
通过电机驱动所述齿轮,带动该右栖息臂2旋转至右栖息臂展开角θ2=θ3 θ4。
[0211]
将该双栖息臂栖息无人机放置在该台阶面上,使所述第一内爪14与第二内爪17均与低面平行并落到低面上,使第三内爪21与第四内爪24两者的末端落在高面上,使四旋翼无人机系统3保持水平。
[0212]
启动分别位于所述左前臂、右前臂、右后臂和左前臂四者上的旋翼模块52中的电机,使所述四旋翼无人机系统中的各旋翼工作,该双栖息臂栖息无人机在台阶面起飞。
[0213]ⅱ双栖息臂栖息无人机降落:
[0214]
保持所述左栖息臂1的展开角θ1=30
°
。
[0215]
保持所述右栖息臂2的展开角θ2=θ3 θ4。
[0216]
降低分别位于所述左前臂、右前臂、右后臂和左前臂四者上的旋翼模块52中的电机的功率,使所述第一内爪14与第二内爪17均与低面平行并落到低面上,使所述第三内爪21与第四内爪24的末端均落到高面上,使四旋翼无人机系统3保持水平。
[0217]
至此,完成所述双栖息臂栖息无人机在水平面、倾斜表面和台阶面的起飞降落。
[0218]
本实施例的双栖息臂栖息无人机的栖息过程根据不同的栖息条件,分为侧面避雷带栖息、顶面圆柱栖息、倒挂狭缝栖息。
[0219]
第一种,侧面避雷带栖息方法:
[0220]
所述侧面避雷带位于楼顶女儿墙上。
[0221]
第一步,双栖息臂栖息无人机起飞。
[0222]
第二步,左栖息臂1旋转至左栖息臂展开角θ1=120
°
;同时,右栖息臂2旋转至右栖息臂展开角θ2=120
°
。
[0223]
第三步,双栖息臂栖息无人机飞至楼顶的女儿墙外侧上方1m处。
[0224]
第四步,双栖息臂栖息无人机下降,直到右栖息臂2的第三内爪21与第四内爪24均挂住女儿墙上的避雷带。
[0225]
第五步,双栖息臂栖息无人机保持不动,左栖息臂1逆时针旋转,直到左栖息臂1的第一内爪14与第二内爪17接触到女儿墙面。
[0226]
第六步,左栖息臂电机29与右栖息臂电机35均锁死,使所述左栖息臂1与右栖息臂2 不能发生旋转。在左栖息臂1、右栖息臂2、避雷带与女儿墙四者之间形成稳定的三角形。四旋翼无人机系统3保持水平。
[0227]
第七步,所有旋翼模块52停机,以节省电能,云台相机继续对地面进行拍摄作业。
[0228]
第八步,当所述双栖息臂栖息无人机完成空中作业需要飞离该栖息点时,其飞离过程是:
[0229]
ⅰ
所有旋翼模块52工作并产生升力,使该双栖息臂栖息无人机悬停。
[0230]
ⅱ
所述左栖息臂电机29解锁;左栖息臂1顺时针转动,直到θ1>0
°
。
[0231]
ⅲ
双栖息臂栖息无人机竖直向上飞行至安全高度;同时,左栖息臂1继续顺时针转动至θ1=120
°
后停止。侧面避雷带栖息完成。
[0232]
第二种,顶面圆柱栖息:
[0233]
所述顶面圆柱栖息中,该圆柱形栖息点位于该双栖息臂栖息无人机上方。
[0234]
第一步,双栖息臂栖息无人机起飞。
[0235]
第二步,双栖息臂栖息无人机飞至该顶面圆柱下方1m处。
[0236]
第三步,左栖息臂1抬升至左栖息臂展开角θ1=150
°
;同时,右栖息臂抬升至右栖息臂展开角θ2=150
°
。
[0237]
第四步,双栖息臂栖息无人机上升,直到所述左栖息臂1的第一外爪12和第二外爪15 均高于所述顶面圆柱,并且右栖息臂2的第三外爪19和第四外爪22均高于顶面圆柱。
[0238]
第五步,双栖息臂栖息无人机停止上升。
[0239]
第六步,左栖息臂抬升至左栖息臂展开角θ1=170
°
。同时,右栖息臂抬升至右栖息臂展开角θ2=170
°
,此时左栖息臂1与右栖息臂2将顶面圆柱完全抱住。
[0240]
第七步,四旋翼无人机系统3下降,直到左栖息臂1的第一外爪12和第二外爪15均挂靠所述顶面圆柱,并且右栖息臂2的第三外爪19和第四外爪22均挂靠所述顶面圆柱。此时四旋翼无人机系统3保持水平。
[0241]
第八步,所有旋翼模块52停机以节省电能,云台相机继续对地面进行拍摄。
[0242]
顶面圆柱栖息后无需将左栖息臂电机29与右栖息臂电机35锁死,通过左栖息臂1与右栖息臂2两者的结构牢固挂住顶面圆柱,该栖息方法更加节省电能。
[0243]
第九步,当所述双栖息臂栖息无人机完成空中作业需要飞离该栖息点时,其飞离过程是:
[0244]
ⅰ
所有旋翼模块52工作,使双栖息臂栖息无人机向竖直向上方向飞行10
㎝
。
[0245]
ⅱ
左栖息臂下降至左栖息臂展开角θ1=150
°
,同时,右栖息臂下降至右栖息臂展开角θ2=150
°
。
[0246]
ⅲ
双栖息臂栖息无人机下降至安全高度。顶面圆柱栖息完成。
[0247]
第三种,倒挂狭缝栖息:
[0248]
所述倒挂狭缝栖息中,该狭缝位于该双栖息臂栖息无人机上方。
[0249]
第一步,双栖息臂栖息无人机起飞。
[0250]
第二步,左栖息臂抬升至左栖息臂展开角θ1=170
°
,同时,右栖息臂抬升至右栖息臂展开角θ2=170
°
。
[0251]
第三步,双栖息臂栖息无人机飞至狭缝顶面下方1m处。
[0252]
第四步,双栖息臂栖息无人机上升,左栖息臂1与右栖息臂2穿过狭缝,直到左栖息臂 1的第一内爪14与第二内爪17均高于狭缝顶面10cm,直到右栖息臂2的第三内爪21与第四内爪24均高于狭缝顶面10cm。
[0253]
第五步,双栖息臂栖息无人机停止上升并保持悬停。
[0254]
第六步,左栖息臂下降至第一内爪14与第二内爪17均与狭缝顶面接触,同时,右栖息臂下降至第三内爪21与第四内爪24均与狭缝顶面接触。此时左栖息臂1与右栖息臂2倒挂
住狭缝顶面。
[0255]
第七步,左栖息臂电机29与右栖息臂电机35均锁死,左栖息臂1与右栖息臂2不能发生旋转。此时双栖息臂栖息无人机保持水平。
[0256]
第八步,所有旋翼模块52停机以节省电能,云台相机继续对地面进行拍摄。
[0257]
第九步,当所述双栖息臂栖息无人机完成空中作业需要飞离该栖息点时,其飞离过程是:
[0258]
ⅰ
所有旋翼模块52工作产生升力,使该双栖息臂栖息无人机保持悬停。
[0259]
ⅱ
左栖息臂抬升至左栖息臂展开角θ1=170
°
,同时,右栖息臂抬升至右栖息臂展开角θ2=170
°
。
[0260]
ⅲ
双栖息臂栖息无人机下降至安全高度。倒挂狭缝栖息完成。
[0261]
至此,完成所述双栖息臂栖息无人机侧面避雷带、顶面圆柱和倒挂狭缝不同条件下的栖息。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。