技术特征:
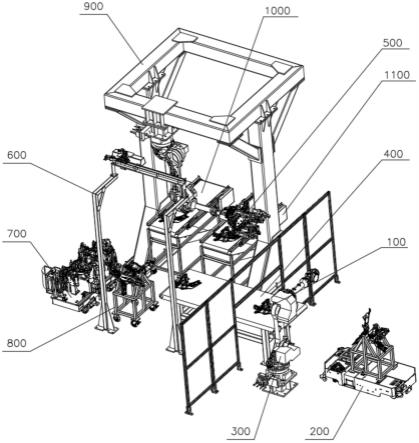
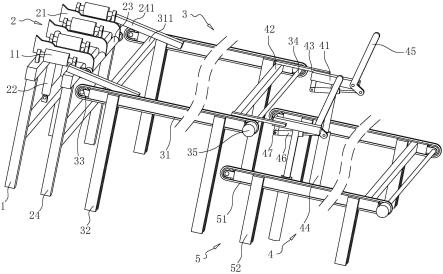
1.一种用于复杂零部件的3d视觉识别与测量智能装置,其特征在于:包括工件(100)、皮带输送线(400)和能够将所述工件(100)输送至皮带输送线(400)一端的agv送料装置(200),在靠近所述agv送料装置(200)的皮带输送线(400)一端上设有送料机器人(300),在所述皮带输送线(400)的另一端设有检测台(800),在远离所述皮带输送线(400)的检测台(800)一侧设有焊接台(700),以及,在靠近所述检测台(800)的皮带输送线(400)上方设有3d视觉装置(600),在所述皮带输送线(400)的侧面设有搬运机器人(900),该搬运机器人(900)上设有抓手装置(500),在所述搬运机器人(900)的下端设有合格输送线(1000)和返修输送线(1100)。2.根据权利要求1所述的一种用于复杂零部件的3d视觉识别与测量智能装置,其特征在于:所述皮带输送线(400)包括安装框架(401),在所述安装框架(401)上沿该安装框架(401)的长度方向设有平皮带(402),在靠近所述送料机器人(300)的平皮带(402)一端上设有电机(405),该电机(405)的输出轴与主传动轴(403)连接在一起,在所述平皮带(402)的另一端设有从传动轴(404),在靠近所述从传动轴(404)的安装框架(401)侧面装设有感应器支架(406),所述感应器支架(406)上装设有能够感应所述皮带输送线(400)上工件(100)位置的第一感应器(407)。3.根据权利要求2所述的一种用于复杂零部件的3d视觉识别与测量智能装置,其特征在于:所述抓手装置(500)包括第一法兰(501),在所述第一法兰(501)上装设有八角管(502),所述第一法兰(501)和八角管(502)组合形成四方型框架结构,在所述八角管(502)的一侧装设有能够对所述抓手装置(500)实现气路控制的气路控制总成(503),在所述八角管(502)上装设有角座(504),所述角座(504)上装设有夹紧气缸(505),在所述夹紧气缸(505)上装设有压块(506),以及,在所述角座(504)上还装设有能够与压块(506)配合完成夹紧动作的托块(507)。4.根据权利要求3所述的一种用于复杂零部件的3d视觉识别与测量智能装置,其特征在于:在所述角座(504)上还装设有双导杆气缸(508),所述双导杆气缸(508)的活动端装设有定位销(509),在所述角座(504)上还装设有能够感应零部件的第二感应器(510)。5.根据权利要求1或2所述的一种用于复杂零部件的3d视觉识别与测量智能装置,其特征在于:所述3d视觉装置(600)包括装设在所述皮带输送线(400)一侧的立柱(601),在所述立柱(601)上装设有安装支柱(602),在所述安装支柱(602)的一侧设有第一安装底座(603),在所述第一安装底座(603)内装设有第一丝杆(604),在所述第一安装底座(603)的一端设有第一伺服(606),所述第一伺服(606)通过一第一联轴器(605)与所述第一丝杆(604)连接在一起,在所述第一丝杆(604)的滑动端设有能够随该第一丝杆(604)进行左右滑动的第一滑动板(608),在所述第一滑动板(608)上装设有第一感应片(607),在所述安装支柱(602)的上方设有拖链底板(612),在所述第一滑动板(608)上设有拖链安装板(613),所述拖链底板(612)和拖链安装板(613)通过一拖链(614)连接在一起,其中,所述拖链(614)的一端设置在所述拖链底板(612)上,所述拖链(614)的另一端设置在所述拖链安装板(613)上。6.根据权利要求5所述的一种用于复杂零部件的3d视觉识别与测量智能装置,其特征在于:在所述第一安装底座(603)的一侧还设有第一感应安装座(611),在所述第一感应安装座(611)上装设有能够感应所述第一感应片(607)位置的第三感应器(609)和第四感应器
(610)。7.根据权利要求6所述的一种用于复杂零部件的3d视觉识别与测量智能装置,其特征在于:在所述第一滑动板(608)上还设有能够随该第一滑动板(608)运动的第二安装底座(615),在所述第二安装底座(615)内设有第二丝杆(616),在所述第二安装底座(615)的一端设有第二伺服(618),所述第二伺服(618)通过一第二联轴器(617)与所述第二丝杆(616)连接在一起,在所述第二丝杆(616)的滑动端设有能够随该第二丝杆(616)进行上下移动的第二滑动板(620),所述第二滑动板(620)上设有视觉检测盒(624)和第二感应片(619)。8.根据权利要求7所述的一种用于复杂零部件的3d视觉识别与测量智能装置,其特征在于:在所述第二安装底座(615)的一侧还设有第二感应安装座(623),在所述第二感应安装座(623)上设有能够感应所述第二感应片(619)位置的第五感应器(621)和第六感应器(622)。
技术总结
本实用新型公开了一种用于复杂零部件的3D视觉识别与测量智能装置。一种用于复杂零部件的3D视觉识别与测量智能装置,包括工件、皮带输送线和能够将工件输送至皮带输送线一端的AGV送料装置,在靠近AGV送料装置的皮带输送线一端上设有送料机器人,在皮带输送线的另一端设有检测台,在远离皮带输送线的检测台一侧设有焊接台,以及,在靠近检测台的皮带输送线上方设有3D视觉装置,在皮带输送线的侧面设有搬运机器人,该搬运机器人上设有抓手装置,在搬运机器人的下端设有合格输送线和返修输送线。本实用新型一种用于复杂零部件的3D视觉识别与测量智能装置,能够实现产线全自动生产和检测,有利于提升产品质量并且能够减少工人劳动强度和保障工人生命安全。动强度和保障工人生命安全。动强度和保障工人生命安全。
技术研发人员:王磊 戴海明 吕浩强 朱德彪 季军奇
受保护的技术使用者:江苏德恒工业智能科技有限公司
技术研发日:2022.10.31
技术公布日:2023/2/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。