1.本公开涉及一种超宽带(uwb)通信装置。本公开另外涉及包括uwb通信装置的uwb通信系统。另外,本公开涉及一种在uwb通信系统中确定距离的方法。因此,本公开可涉及射频通信的技术领域,具体地说,uwb通信的技术领域。
背景技术:
2.射频(rf)测距系统可用于测量对象之间的范围(距离),例如标签(例如,手机或钥匙)与一个或多个锚点(例如,信标)之间的范围。这些测距系统可基于到达时间(toa)原理来确定装置之间的距离,例如锚点与标签之间的距离。例如,第一装置的传输器发送出信号,所述信号由第二装置接收。基于信号到达第二装置的接收器所花费的时间量,可计算对象之间的距离(且因此计算位置)。在特定应用中,可使用uwb系统。
3.术语“uwb”可以指可在无线电频谱的大部分内使用极低能级进行短程、高带宽通信的无线电技术。uwb可以指用于在大带宽(>500mhz)内传输信息扩散的技术。uwb可被限定为天线传输,对于所述天线传输,发射信号带宽超过不到500mhz或20%的算术中心频率。uwb传输可通过以特定时间间隔产生无线电能量且占据较大带宽而传输信息,由此实现脉冲位置或时间调制。uwb的范围可例如在数十米的范围内。uwb距离确定系统可采用到达时间原理来确定uwb通信装置之间的距离,例如移动装置与(目标装置上的)锚点装置之间的距离。
4.然而,来自uwb测距(距离确定)交换的基于时间的距离确定测量(例如,飞行时间(tof)和到达时间差(tdoa))可能遭受干扰,例如角度相关天线群组延迟或天线缺陷。取决于传输天线与接收天线之间的相对角度,这些干扰可能产生距离/位置估计误差。这些干扰可能阻止例如恶劣环境中的机器人导航的高度准确距离估计。
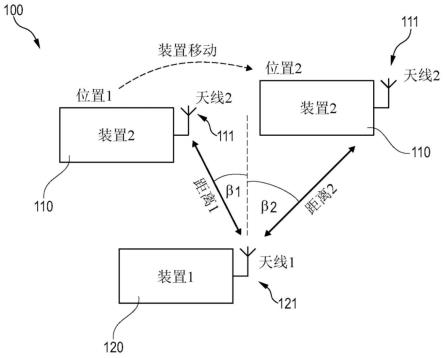
5.uwb距离确定(例如,通过双向测距(twr))通过测量例如tof来估计装置之间的距离。例如角度相关群组延迟等干扰对所测量的(且因此确定的)距离具有直接影响。两个位置处(第二装置从第一位置移动到第二位置)的信号到达角β的影响可在以下等式中示出(还参见图1):所测量_距离_pos1=距离1 f(β1)并且所测量_距离_pos2=距离2 f(β2)。
6.然而,由于f(β1)≠f(β2),因此常规补偿方法可能导致取决于角度相关天线延迟的较大误差。举例来说,如果在pos1处(在信号角β1下)估计的天线延迟为0.5m且pos2处(在信号角β2下)的天线延迟为-0.5m,则pos2处的距离测量误差为1m,这对于需要装置之间准确且稳固的距离估计的使用情况可能是不可接受的。在实际情境中,两个装置可示出此角度相关天线延迟,即,ant1和ant2的天线延迟彼此叠加,从而导致较大距离估计误差。甚至对于自由空间中的设计良好的天线,距离确定可能受到例如天线的角度相关群组延迟等干扰的显著影响。
技术实现要素:
7.本公开的目标是提供uwb通信系统中的稳固且可靠的距离确定。
8.为了实现上文所限定的目的,提供了根据独立权利要求所述的装置、系统、方法和用法。
9.根据本公开的一方面,描述了一种超宽带(uwb)通信装置,包括:
10.i)uwb天线,所述uwb天线被配置成接收uwb信号,具体地说,从另外的uwb通信装置接收uwb信号(单向或双向),以及
11.ii)控制装置(例如,集成电路),所述控制装置被配置成
12.a)基于所接收uwb信号确定到达角(具体地说,所接收/传入信号的方位角和仰角角度),
13.b)(例如,通过tof或tdoa)确定uwb通信装置与另外的uwb通信装置之间的距离(在此上下文中,距离还可从距离差导出),并且由此
14.c)使用(至少一个)确定的到达角补偿(校正、校准)距离确定干扰。
15.根据本公开的另外的方面,描述了一种uwb通信系统,包括:
16.i)如上文所描述的uwb通信装置,以及
17.ii)另外的uwb通信装置,所述另外的uwb通信装置包括另外的天线。
18.根据本公开的另外的方面,描述了一种在具有第一天线的uwb通信装置和具有另外天线的另外的uwb通信装置的uwb通信系统中确定距离的方法,所述方法包括:
19.i)在uwb通信装置与另外的uwb通信装置之间传输uwb信号(单向或双向);
20.ii)基于所传输uwb信号确定到达角,
21.iii)确定uwb通信装置与另外的uwb通信装置之间的距离,并且由此
22.iv)使用确定的到达角补偿距离确定干扰。
23.根据本公开的另外的方面,描述了一种对确定的到达角(具体地说,两个或更多个)的用法(使用方法),以将确定的到达角用于补偿uwb通信系统中的距离确定干扰(例如,天线缺陷和/或延迟)。
24.在本公开的上下文中,术语“uwb通信装置”可尤其指能够经由射频rf(具体地说,使用超宽带(uwb))与通信交互的装置。术语“uwb通信装置”可例如指具有uwb功能性的ic、标签(ic和天线)、手机、令牌、钥匙、智能卡等。
25.在本公开的上下文中,术语“到达角”可尤其指入射在天线上的射频波(uwb)的传播方向。到达角可由传入(所接收)uwb信号的方位角和仰角指定。所述方位角和仰角可应用于补偿距离确定干扰,例如天线延迟。
26.根据示例性实施例,本公开可基于以下想法:当在执行距离确定时确定并应用传入uwb通信信号的到达角来补偿距离确定干扰时,可实现uwb通信系统中的稳固且可靠的距离确定。对例如非理想的角度相关天线群组延迟的此类补偿可改进uwb距离估计,且可通过低计算复杂性实现,因此所述补偿还可适合于具有极少计算能力的装置(比如标签)且不会显著增加总功耗。对于需要高度准确的距离或位置估计的使用情况,此补偿可尤其受关注。
27.常规地,此类距离确定干扰基本上不被补偿。然而,可补偿这些干扰以减少距离测量误差,且因此减少定位误差。到达角测量到目前为止仅用于测定装置的定向。然而,本公开首次描述在uwb距离确定期间针对误差补偿应用到达角确定。
28.本描述了天线缺陷和延迟补偿方法,以改进执行基于到达时间的消息交换的uwb系统中的距离估计。uwb天线可取决于传入信号的到达角而展现不同群组延迟。因此,通过
确定所接收信号的到达角,可应用角度相关补偿,从而改善所得距离确定。
29.在下文中,将解释装置、系统、方法和用法的另外的示例性实施例。
30.根据示例性实施例,距离确定干扰包括天线缺陷、延迟、角度相关延迟、角度相关群组延迟中的至少一个。由此,可克服常见干扰,使得实现尤其准确的距离确定。
31.根据另外的示例性实施例,uwb通信装置被配置成基于基于时间的距离测量,具体地说基于飞行时间tof和/或到达时间差tdoa而确定距离。因此,可直接应用所建立和标准化uwb方法。
32.在此文档的上下文中,术语“基于时间的距离测量”可指与相对于传输时间的信号到达(接收器)时的时间点相关的测量。由此,术语基于时间的距离测量可以是一般表达,而术语toa、tof和tdoa可指特定实施方案。术语toa(到达时间)可指原始测量,所述原始测量根据装置的本地时钟确定接收信号的时间(接收信号的时间戳)。接着,基于两个或更多个消息的所接收和所传输的时戳(双向测距),所述装置可(使用计算)确定两个装置之间的飞行时间(距离)。替代地,tdoa可指两个所接收时戳(toa)的差,所述差产生距离差。使用几个距离差,可确定装置的位置(例如,使用双曲线求解器)。
33.在例子中,uwb通信装置将uwb信号传输到另外的uwb通信装置,另外的uwb通信装置接收所述信号并发送回(另外的)uwb信号(双向)。在另一例子中,仅另外的uwb信号将uwb信号发送到uwb通信装置(单向)。在又一例子中,uwb通信装置将uwb信号传输到另外的uwb通信装置,并且另外的uwb通信装置经由频带外信道将距离相关信息发送回uwb通信装置。
34.根据另外的示例性实施例,uwb通信装置另外包括另外的天线,所述另外的天线被配置成从另外的uwb通信装置或另一uwb通信装置(多个天线装置)接收另外的uwb信号。控制装置另外被配置成通过以下操作确定到达角:基于uwb信号和另外的uwb信号的相位应用到达相位差pdoa角度确定。因此,可用稳固且可靠的方式确定到达角。
35.一般来说,到达角测量测量信号到达不同天线之间的时间延迟。使用电磁波的传播速度和所测量的延迟,可计算距离δl。连同天线之间的已知距离l,可计算入射信号的到达角。然而,由于关于天线轴线的对称性(参见图2),此结果可能是不明确的。为了解决此不明确性且为了允许三维到达角确定,可能需要更多天线和不同的天线轴线。尤其有效的角度确定方法可为到达相位差(pdoa)。
36.tof-aoa、tdoa-aoa和pdoa-aoa之间的差异可为导出信号到达天线之间的时间延迟的方式。一方面,飞行时间(tof)和到达时间差(tdoa)方法使用来自测距(距离确定)的时戳来估计延迟。
37.另一方面,pdoa方法比较入射信号的载波相位。知道载波频率,可再次使用此相位差计算时间延迟。对于天线之间的相同距离l,此方法可得到更高的角度估计准确性。为了防止额外的不明确性,天线之间的距离可优选地小于波长的一半,这通常是归因于空间和集成要求的情况。这还可意味着对于相同天线,入射信号将受到极类似天线图案和对于所有天线的群组延迟的影响(假设天线阵列被很好地设计成最大限度地减少天线元件之间的耦合)。
38.根据uwb通信系统的另外的示例性实施例,另外的天线被配置成从uwb通信装置或另一uwb通信装置接收另外的uwb信号。具体地说,另外的uwb通信装置可包括另外的控制单元,所述另外的控制单元被配置成基于另外的所接收uwb信号确定另外的到达角。控制单元
和/或另外的控制单元被配置成:基于uwb信号和另外的uwb信号应用pdoa角度确定。
39.根据另外的示例性实施例,uwb通信装置另外包括装置内部测量装置,具体地说,惯性测量单元,所述装置内部测量装置被配置成测量指示uwb通信装置的定向的信息(具体地说,基于地球磁场)。控制装置另外被配置成使用指示定向的信息确定到达角。装置内部测量系统可已经实施于uwb通信装置中。因此,不需要额外成本和努力。当确定到达角时,可有利地考虑所测量的定向。另外,指示定向的信息可例如经由uwb或频带外传输到另外的uwb(锚点)通信装置。
40.根据另外的示例性实施例,控制装置另外被配置成基于所接收uwb信号,具体地说,使用基于时间的距离测量来估计(粗略估计)uwb通信装置的空间位置。由于uwb通信装置可能已经装备成执行空间位置估计(使用基于时间的距离测量),因此可能不需要额外成本/努力。当确定到达角时,可有利地考虑所测量的空间位置。
41.根据另外的示例性实施例,控制装置另外被配置成基于指示定向的信息与uwb通信装置的所估计空间位置的组合而确定到达角。以此方式,可组合上文所描述的测量的结果以便获得尤其准确的到达角确定。
42.在此类配置的特定例子中,多个锚点装置(另外的uwb通信装置)可被配置成估计移动装置(uwb通信装置)的位置,所述移动装置由彼此连接的uwb系统和imu系统构成(还参见图3)。imu系统可被配置成与测量装置相对于参考坐标系(例如,地球的磁场)的定向。通过例如在uwb测距交换期间或使用频带外信道将此imu(定向)信息传输到锚点系统,锚点系统可变得知道移动装置的定向。基于未补偿距离估计,可启用锚点系统来估计粗略移动装置位置。通过将此粗略位置估计与由imu-系统测量的移动装置定向组合,锚点装置可估计移动装置天线与锚点装置的天线之间的粗略方位角和仰角角度。
43.可应用此概念,而不管对移动装置(节点)上还是对锚点装置(节点)估计装置(节点)的位置。优选地,信息(类似于imu、tdoa/tof)可与运行延迟补偿定位算法的装置共享。举例来说,如果将对移动装置(节点)进行定位,则不需要imu数据交换,因为装置节点已经包括tdoa/tof信息。取决于使用情况,uwb通信装置与另外的uwb通信装置之间的数据交换可在频带内(uwb信道)或频带外(其它信道)进行。
44.在特定例子中,可测量uwb通信装置的定向,随后为tof/tdoa测量,以估计移动装置(节点)的空间位置。这两个步骤的次序还可调换或组合在单个步骤中。在已收集测量数据之后,可使用定位算法获得uwb通信装置的粗略位置估计。通过知道此粗略位置估计且将此粗略位置估计与uwb通信装置的所测量定向组合,可计算由锚点装置传输的所有uwb信号的传入角(aoa)并将所述传入角用于补偿角度相关天线延迟。
45.可独立于例如tdoa、ss-twr、ds-twr等测距(距离确定)方法而使用所描述的方案。另外,类似于如何估计节点侧的aoa,还可估计锚侧的aoa且考虑将所述aoa用于改进定位估计。
46.根据另外的示例性实施例,到达角确定包括调节环路(参见例如图4)。当将位置和/或定向估计与阈值进行比较时,可进一步改进所述确定的质量。仅在(至少两个)估计示出为差低于阈值时,准确性才可为可接受的。
47.参考上文所描述的例子,可进行更准确的位置估计,且接着使用所述位置估计来改进基于imu和位置的aoa估计。继而,可再次使用此aoa估计更准确地估计装置位置。估计
位置、aoa和补偿天线设计的此迭代流程理论上可重复无限次数,出于该原因,需要建立中止准则。
48.例如,存在两个中止准则,第一中止准则取决于每次迭代之后增加的迭代计数。一旦此迭代计数达到最大迭代次数,算法就停止。第二中止准则基于迭代之间的相对位置变化,一旦当前位置估计与前一位置估计之间的位置变化的差低于给定阈值,算法也可中止,因为另外的迭代将不会引起位置估计的显著变化。
49.根据另外的示例性实施例,uwb通信装置是由以下组成的群组中的至少一个:移动装置、手机、收发器、电路、标签、钥匙、令牌、智能卡。在例子中,所描述的基于到达角的补偿可用可行且有成本效益的方式实施于多个在经济上受关注的uwb应用中。
50.根据uwb通信系统的另外的示例性实施例,uwb通信装置是移动装置,和/或另外的uwb通信装置是静态装置,例如锚点装置,具体地说,附接到目标装置的锚点装置。
51.在本文档的上下文中,术语“锚点装置”可指可与目标装置相关联(例如,布置在目标装置处或耦合到目标装置)且可经由uwb与移动装置通信的任何电气装置。锚点装置还可被称为例如信标、节点或标记。锚点装置可以是单向或双向通信装置。
52.根据另外的示例性实施例,uwb通信系统另外包括形成uwb锚点系统的多个锚点装置。此类配置(参见例如图3)对于uwb架构可为常见的。多个锚点装置可改进距离确定质量。然而,归因于uwb信号的数目,确定干扰(具体地说,角度相关群组延迟)可能相互叠加。尤其在此情形下,到达角补偿可以是高度有利的。
53.在视线条件下,例如天线群组延迟等确定干扰会在飞行时间估计τ^中引入偏置δ(α,β),所述偏置取决于传入信号的方位角(α)和仰角(β)角度:
54.τ^=τ δ(α,β)
55.其中τ为执行测距交换的两个装置之间的真实飞行时间。因此,距离估计d
′
=τ^x c将由于角度相关天线群组延迟而存在误差ε,如下:
56.ε=d
′‑
d=δ(α,β)x c
57.给定在装置的预表征阶段中测量的已知天线群组延迟,如果在接收装置处测量α、β,则可将校正系数应用于测距距离估计。此方法的计算成本可能较低,且可仅需要一个表来存储所有所关注角的对应补偿值。这意味着所述方法还可在例如手机或汽车钥匙等低功率/低成本系统上运行。
58.如上文所限定的方面和本公开的另外方面从下文所描述的实施例的例子中显而易见,且参考实施例的例子来解释。本公开将在下文中参考实施例的例子更详细地进行描述,但本公开不限于所述例子。
附图说明
59.图1示出根据本公开的示例性实施例的uwb通信系统。
60.图2示出根据本公开的示例性实施例的使用到达相位差测量的uwb通信装置。
61.图3示出根据本公开的示例性实施例的使用惯性测量单元的uwb通信系统。
62.图4示出根据本公开的示例性实施例的使用调节环路的uwb通信装置。
63.图式中的图示是示意性的。在不同图式中,用相同的附图标记表示类似或相同元件。
具体实施方式
64.在参考图式更详细地描述示例性实施例之前,已概述形成本公开的实施例所依据的一些基本考虑因素。
65.根据本公开的示例性实施例,描述了补偿配备有uwb的装置中的角度相关天线群组延迟的方法,所述配备有uwb的装置包括能够估计传入信号的到达角(aoa)的uwb收发器系统或包括用于估计其相对定向且因此还估计信号的传入角的惯性测量单元(imu)的uwb系统。i)在基于双天线的收发器系统的情况下,aoa可基于在两个接收器天线处接收的信号的到达相位差(pdoa)来估计,然后映射到传输器相对于接收器装置的坐标系的相对方位角和仰角。ii)在包括imu的uwb收发器系统的情况下,收发器的粗略位置估计可与已知装置定向组合以用于估计传入信号的方位角和仰角aoa。给定从天线表征实验活动获得的每个信道的这些aoa估计和已知角度相关天线群组延迟,可应用基于方位角和仰角的天线延迟补偿,从而产生更准确的距离估计。
66.根据本公开的示例性实施例,所描述的方法可应用于执行测距(距离确定)且能够例如使用多天线系统或imu来估计传入信号的到达角(aoa)的任何uwb系统中。所描述的方法可例如用于以下应用中:
[0067]-使用uwb测距的室内/室外导航系统。
[0068]-使用测距方案的室内/室外跟踪系统。
[0069]-测量用户之间的距离以例如用于社交距离的移动系统。
[0070]-用于寻找相对于例如智能标签等配备有uwb的对象的用户距离或相对位置或当使用配备有uwb的智能手机作为iot装置的控制器时的移动系统。
[0071]-汽车智能接入系统。
[0072]
图1示出根据本公开的示例性实施例的uwb通信系统100。uwb通信系统100包括具有第一天线111的uwb通信装置110和具有另外的天线121的另外的uwb通信装置120。在此例子中,uwb通信装置110是移动装置,例如手机或标签,而另外的uwb通信装置120是固定装置,例如附接到目标装置的锚点装置。uwb通信信号可在uwb通信装置110的天线111与另外的uwb通信装置120的另外的天线121之间传送。在此例子中,两个方向都是可能的。uwb通信装置110包括控制单元(例如,ic,未示出),所述控制单元被配置成确定uwb通信装置110与另外的uwb通信装置120之间的距离。距离确定基于在uwb通信装置100与另外的uwb通信装置120之间传送的uwb信号的到达时间测量。
[0073]
在此例子中,装置1(另外的uwb通信装置120)使用非理想天线ant1(另外的天线121)以进行uwb通信和距离估计。装置2(uwb通信装置110)使用理想天线ant2(天线111)以进行uwb通信。使用双向测距(twr)交换、常见的基于测距的距离估计技术,装置110、120可确定它们之间的距离。虽然装置1的位置是静态的,但装置2改变其位置。在装置2的pos1处,装置1接收由装置2发射的具有信号到达角β1的uwb信号。当装置2在pos2处时,装置1接收具有信号到达角β2的uwb信号。如果装置2在pos1处,则装置之间的物理距离为距离1,而在pos2处,则物理距离为距离2。由于装置1使用非理想天线,因此天线延迟是传入信号角的函数,被称为f_天线_延迟(β),其中β为相比于在图1中示出为虚线的天线参考轴线的传入信号角。由于装置1使用其延迟取决于传入信号的角度的非理想天线,因此装置2相对于装置1的位置的位置改变信号的方向,由此影响距离确定(距离确定干扰)。
[0074]
在本公开中通过以下操作解决此问题:i)基于所接收uwb信号确定到达角β,以及ii)确定uwb通信装置110与另外的uwb通信装置120之间的距离,同时使用确定的到达角β1、β2补偿距离确定干扰,例如(角度相关)延迟和天线缺陷。
[0075]
图2示出根据本公开的示例性实施例的使用到达相位差测量的uwb通信装置110或uwb通信系统100。具体地说,应用至少两个天线,所述至少两个天线各自接收传入uwb信号。虽然已知两个天线之间的距离l,但基于所接收uwb信号和所接收另外uwb信号的相位来计算距离δl。
[0076]
根据第一选项,提供具有多个天线的uwb通信装置110。因此,uwb通信装置110包括另外的天线112,所述另外的天线112被配置成从另外的uwb通信装置120或另一uwb通信装置130接收另外的uwb信号。uwb通信装置110的控制装置被配置成基于uwb信号和另外的uwb信号应用到达相位差pdoa角度确定。
[0077]
根据第二选项,提供uwb通信系统100,所述uwb通信系统100具有包括天线111的uwb通信装置110和包括另外的天线121的另外的uwb通信装置120。另外的天线112被配置成从另一uwb通信装置130接收另外的uwb信号。控制单元和/或另外的控制单元被配置成基于uwb信号和另外的uwb信号应用pdoa角度确定。
[0078]
图3示出根据本公开的示例性实施例的使用惯性测量单元的uwb通信系统100。uwb通信系统100包括uwb通信装置110(此处为装置1),所述uwb通信装置110包括装置内部测量装置,所述装置内部测量装置为耦合到uwb系统(控制单元)的惯性测量单元115。所述单元115被配置成例如基于地球磁场而测量指示uwb通信装置110的定向的信息。uwb通信系统100另外包括锚点系统101,所述锚点系统101包含四个锚点装置120、130、140、150。每个锚点装置包括相应uwb天线121、131、141、151。在此例子中,uwb信号在两个方向上在uwb通信装置110与相应锚点装置120、130、140、150之间传输。
[0079]
基于这些uwb信号的到达时间,可估计距离。uwb通信装置110的控制装置被配置成使用toa测量方法基于所接收uwb信号而估计uwb通信装置110的空间位置。控制装置(或锚点装置中的一者的另外控制装置)另外被配置成基于指示定向的信息和uwb通信装置110的所估计空间位置的组合而确定到达角β。指示uwb通信装置110的定向的信息可通过uwb通信或通过频带外信道传送到锚点装置。
[0080]
图4示出根据本公开的示例性实施例的使用调节环路160的uwb通信装置110。uwb通信装置110应用上文在图3中描述的基于imu单元115的到达角确定。为了改进角度确定,实施反馈环路。将最后两个位置估计之间的差(基于uwb通信装置的定向和粗略位置估计)与预定义阈值进行比较。如果位置估计差低于阈值,则可进一步应用补偿装置位置(报告补偿装置位置)。然而,如果位置估计高于阈值,则递增计数,且执行另外的调节循环。
[0081]
在本说明书中,已经依据选定的细节集合而呈现实施例。然而,本领域的普通技术人员应理解,可实践包括这些细节的不同选定集合的许多其它实施例。希望所附权利要求书涵盖所有可能的实施例。
[0082]
参考标号
[0083]
100uwb通信系统
[0084]
101锚点系统
[0085]
110uwb通信装置
[0086]
111天线
[0087]
112另外的天线(相同的装置)
[0088]
120另外的uwb通信装置
[0089]
121另外的天线
[0090]
130另一装置,锚点装置
[0091]
140,150锚点装置
[0092]
131,141,151天线
[0093]
160调节环路。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。