技术特征:
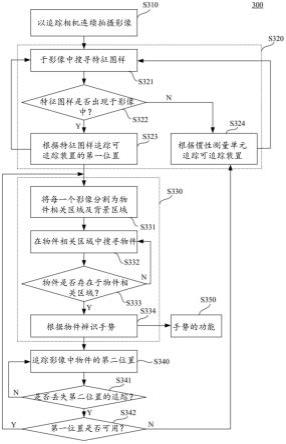
1.一种追踪方法,其特征在于,其步骤包含:以一追踪相机拍摄多个影像;追踪所述多个影像内的一可追踪装置的一第一位置;辨识所述多个影像中该第一位置周围的一物件;以及响应于辨识到该物件,追踪所述多个影像中该物件的一第二位置。2.如权利要求1所述的追踪方法,其特征在于,其中该可追踪装置的一表面设有一特征图样,且追踪该可追踪装置的该第一位置的步骤进一步包含:基于一计算机视觉算法,搜寻所述多个影像中的该特征图样。3.如权利要求2所述的追踪方法,其特征在于,其中追踪该可追踪装置的该第一位置的步骤进一步包含:响应于在所述多个影像中搜寻到该特征图样,根据该特征图样在所述多个影像中的多个坐标追踪该第一位置;以及响应于未于所述多个影像中搜寻到该特征图样,根据设于该可追踪装置上的一惯性测量单元所产生的一姿势数据,追踪所述多个影像外的该可追踪装置。4.如权利要求1所述的追踪方法,其特征在于,其中辨识所述多个影像中该第一位置周围的该物件的步骤进一步包含:将所述多个影像各者分割为与该第一位置相邻的一物件相关区域及一背景区域;以及基于一计算机视觉算法,在所述多个影像各者中的该物件相关区域搜寻该物件。5.如权利要求4所述的追踪方法,其特征在于,其中该计算机视觉算法不会在所述多个影像中的该背景区域执行。6.如权利要求4所述的追踪方法,其特征在于,进一步包含:根据所述多个影像中该可追踪装置上的一特征图样,追踪该可追踪装置的一定向,其中该物件相关区域根据该第一位置、该定向以及一逆向运动学算法而决定。7.如权利要求1所述的追踪方法,其特征在于,其中该可追踪装置是穿戴于一使用者的一手腕或一手指上的一穿戴式装置,该物件为该使用者的一只手,辨识该物件的步骤进一步包含:根据该物件辨识一手势,其中该手势包含握、捏、指、抓、打字、按或放下。8.如权利要求1所述的追踪方法,其特征在于,进一步包含:响应于丢失该第二位置的追踪且该第一位置不可用,根据设于该可追踪装置上的一惯性测量单元所产生的一姿势数据,追踪该可追踪装置。9.如权利要求1所述的追踪方法,其特征在于,进一步包含:响应于丢失该第二位置的追踪且该第一位置可用,返回至辨识该第一位置周围的该物件。10.一种追踪系统,其特征在于,包含:一可追踪装置;一追踪相机,被配置为拍摄多个影像;一处理单元,与该追踪相机进行通信,其中该处理单元被配置为:自该追踪相机接收多个影像;追踪所述多个影像内的一可追踪装置的一第一位置;
辨识所述多个影像中该第一位置周围的一物件;以及响应于辨识到该物件,追踪所述多个影像中该物件的一第二位置。11.如权利要求10所述的追踪系统,其特征在于,其中该可追踪装置包含该可追踪装置的一表面上的一特征图样,该处理单元基于一计算机视觉算法,搜寻所述多个影像中的该特征图样以追踪该可追踪装置的该第一位置。12.如权利要求11所述的追踪系统,其特征在于,其中该可追踪装置包含一惯性测量单元,该处理单元被配置为响应于在所述多个影像中搜寻到该特征图样,根据该特征图样在所述多个影像中的多个坐标追踪该第一位置,且该处理单元被配置为响应于未于所述多个影像中搜寻到该特征图样,根据设于该可追踪装置上的一惯性测量单元所产生的一姿势数据,追踪所述多个影像外的该可追踪装置。13.如权利要求10所述的追踪系统,其特征在于,其中该处理单元被配置为将所述多个影像各者分割为与该第一位置相邻的一物件相关区域及一背景区域,且该处理单元被配置为通过一计算机视觉算法在所述多个影像各者中的该物件相关区域搜寻该物件。14.如权利要求13所述的追踪系统,其特征在于,其中该计算机视觉算法不会在所述多个影像中的该背景区域执行。15.如权利要求13所述的追踪系统,其特征在于,其中该处理单元进一步被配置为根据所述多个影像中该可追踪装置上的一特征图样,追踪该可追踪装置的一定向,该处理单元根据该第一位置、该定向以及一逆向运动学算法决定该物件相关区域。16.如权利要求10所述的追踪系统,其特征在于,其中该可追踪装置是穿戴于一使用者的一手腕或一手指上的一穿戴式装置,该物件为该使用者的一只手,该处理单元被配置为辨识该使用者的一手势,其中该手势包含握、捏、指、抓、打字、按或放下。17.如权利要求10所述的追踪系统,其特征在于,其中响应于该物件移动至所述多个影像外,该处理单元根据设于该可追踪装置上的一惯性测量单元所产生的一姿势数据,追踪该可追踪装置。18.如权利要求10所述的追踪系统,其特征在于,其中响应于丢失该第二位置的追踪,该处理单元返回至辨识该第一位置周围的该物件。19.如权利要求10所述的追踪系统,其特征在于,其中该追踪相机系设于一头戴显示装置上以追踪一手势。20.一种非暂态计算机可读取储存介质,其特征在于,储存有至少一程序指令,该程序指令由一处理单元执行以执行一追踪方法,该追踪方法包含以下步骤:触发一追踪相机以拍摄多个影像;追踪所述多个影像内的一可追踪装置的一第一位置;辨识所述多个影像中该第一位置周围的一物件;以及响应于辨识到该物件,追踪所述多个影像中该物件的一第二位置。
技术总结
一种追踪方法,用以基于计算机视觉追踪一物件,其包含以下步骤。以一追踪相机拍摄一系列影像。在多个影像中追踪一可追踪装置的一第一位置。辨识多个影像中第一位置周围的一物件。响应于辨识到物件,追踪多个影像中物件的一第二位置。本公开所提供的追踪方法得以在更短的计算时间内有效地追踪、辨识手部动作和手势,并且具有更高的准确度并且适用于各种应用。用。用。
技术研发人员:黄乔健 郑方俞
受保护的技术使用者:宏达国际电子股份有限公司
技术研发日:2022.07.15
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。