1.本发明涉及一种自主的移动式户外土地加工机器人(outdoorbodenbearbeitungsroboter)。
技术实现要素:
2.本发明目的在于提供一种自主的移动式户外土地加工机器人,其具有改善的特性,尤其实现较高的用户友好性。
3.本发明通过提供具有权利要求1的特征的自主的移动式户外土地加工机器人来实现该目的。本发明的有利的改进方案和/或设计方案在从属权利要求中描述。
4.根据本发明的自主的移动式户外土地加工机器人具有至少在上侧的外轮廓和屏幕装置。外轮廓在户外土地加工机器人的俯视图中限定或具有轮廓面。尤其在户外土地加工机器人的俯视图中,屏幕装置限定或具有屏幕面。尤其在户外土地加工机器人的俯视图中,屏幕面的大小是或占据轮廓面的大小的至少5%(百分比)、尤其至少7.5%。
5.这、尤其屏幕面的大小使户外土地加工机器人的用户尤其在灌木下和/或在室外和/或在远处(例如从露台)能够良好地看到屏幕面。因此,这实现了较高的用户友好性。
6.尤其地,自主的移动式户外土地加工机器人可以意味着户外土地加工机器人可以构造成自动地或独立地或自控地和/或独立于用户运动,尤其在可预设和/或限界的工作面上运动,并且/或者自动地或独立地或自控地和/或独立于用户进行加工,尤其对工作面进行加工,尤其开始和/或结束加工过程或加工。
7.户外土地加工机器人可以是室外-或外部-和/或绿化场地土地加工机器人和/或园艺加工器具和/或是电气的。
8.工作面可以是室外场地(尤其未封闭的土地)或绿化场地(如具有草的草地)。进一步附加地,工作面可以是具有道路板、露台砖和/或铺路石的面。
9.户外土地加工机器人、尤其户外土地加工机器人的加工工具可以构造用于在工作面上进行加工或运行。尤其地,加工工具可以具有、尤其是切割工具。附加地或备选地,加工工具可以具有、尤其是清洁工具、尤其线材刷。
10.户外土地加工机器人可以具有(尤其具有滚轮的)行驶机架,尤其用于户外土地加工机器人在工作面上的行驶运动。尤其地,行驶机架、尤其行驶机架的滚轮可以具有或限定行驶平面。尤其地,在上侧可以是指在户外土地加工机器人的与行驶平面相对而置的一侧。附加地或备选地,术语“行驶机构”或“底盘”可以与术语“行驶机架”同义使用。
11.至少在上侧的外轮廓可以具有至少在上侧的覆盖部或至少部分地、尤其完全地由覆盖部形成。附加地或备选地,外轮廓、尤其覆盖部可以限定土地面或基面、尤其被覆盖的和/或平坦的土地面或基面。尤其地,在上侧可以是指在户外土地加工机器人的与土地面相对而置的一侧。附加地或备选地,覆盖部可以是覆盖罩和/或实现对户外土地加工机器人、尤其行驶机架和/或屏幕装置的保护。尤其地,术语“保护罩”可以与术语“覆盖罩”同义使用。进一步附加地或备选地,外轮廓、尤其覆盖部可以至少部分地、尤其完全地覆盖行驶机
架。进一步附加地或备选地,外轮廓、尤其覆盖部和/或行驶机架可以至少部分地、尤其完全地覆盖加工工具。进一步附加地或备选地,加工工具可以布置在行驶机架下面和/或在工作面和/或行驶平面和/或土地面上面。
12.表述“从上方观察户外土地加工机器人”或“在正交于工作面和/或行驶平面和/或土地面的方向上”可以与表述“在户外土地加工机器人的俯视图中”同义使用。
13.屏幕装置、尤其连同其屏幕面可以不正交于、尤其平行于工作面和/或行驶平面和/或土地面和/或轮廓面。附加地或备选地,屏幕装置可以是电气的。进一步附加地或备选地,术语“显示器装置”可以与术语“屏幕装置”同义使用。进一步附加地或备选地,屏幕装置和覆盖部可以关于彼此是不可运动的,尤其在平移和/或旋转方面是不可运动的,并且/或者彼此尤其在平移和/或旋转方面牢固布置、尤其固定。
14.屏幕面可以处于户外土地加工机器人的至少在上侧的表面、尤其外轮廓、尤其覆盖部处。附加地或备选地,屏幕面的平行于工作面和/或行驶平面和/或土地面和/或轮廓面的大小可以是轮廓面的大小的至少5%、尤其至少7.5%。进一步附加地或备选地,屏幕面的大小可以是轮廓面的大小的最大100%、尤其最大50%、尤其最大25%。
15.术语“值”可以与术语“大小”同义使用。
16.在本发明的一种改进方案中,屏幕装置具有至少一个光源,用于在屏幕面中产生光学输出。至少一个光源布置在外轮廓、尤其覆盖部下面。屏幕装置在外轮廓、尤其覆盖部的一个、尤其所述至少在上侧的表面处限定或具有屏幕面。外轮廓、尤其覆盖部至少在屏幕面处尤其至少部分地或完全地是透明的或半透明的。这使用户能够穿过外轮廓感知输出。附加地或备选地,半透明实现至少光源的不可见性,尤其在不产生时的不可见性,和/或加热的减少,和/或对屏幕装置、尤其至少一个光源的uv保护,尤其地其对于屏幕装置在该大小下在室外(通常在直接的太阳照射的情况下)的鲁棒运行可以是有利的。尤其地,产生可以是自动的。附加地或备选地,术语“视觉”可以与术语“光学”同义使用。进一步附加地或备选地,术语“呈现”可以与术语“输出”同义使用。进一步附加地或备选地,表述“图像”可以与表述“光学输出”同义使用。进一步附加地或备选地,光源可以是电气的。进一步附加地或备选地,至少一个光源可以布置在工作面和/或行驶平面和/或土地面上面。进一步附加地或备选地,至少一个光源可以至少向上和/或朝向外轮廓、尤其覆盖部辐射地构造。
17.在本发明的一种改进方案中,屏幕装置具有至少一个光源、尤其所述至少一个光源和/或操控-或管控电子设备,用于尤其在屏幕面中产生一个、尤其所述光学输出。户外土地加工机器人具有壳体壳。壳体壳和外轮廓、尤其覆盖部形成屏幕壳体、尤其共同的屏幕壳体。至少一个光源和/或操控电子设备尤其完全地布置或容纳在屏幕壳体的容纳空间、尤其内部的容纳空间中。尤其地,外轮廓、尤其覆盖部和壳体壳相对彼此密封,尤其借助于密封绳(dichtschnur)相对彼此密封。这实现了简单和/或良好地保护至少一个光源和/或操控电子设备免受外部环境影响(尤其污物和/或水)、尤其在容纳空间或屏幕壳体外的环境影响。尤其地,产生可以是自动的。附加地或备选地,至少一个光源可以是可电气操控或可管控的。进一步附加地或备选地,操控电子设备可以构造成用于尤其自动地操控或管控至少一个光源。至少一个光源和/或操控电子设备和/或壳体壳可以布置在外轮廓、尤其覆盖部下面,和/或在工作面和/或行驶平面和/或土地面上面。进一步附加地或备选地,术语“容器”或“盆状部”可以与术语“壳体壳”同义使用。进一步附加地或备选地,术语“盖”可以与术
语“外轮廓”同义使用。进一步附加地或备选地,外轮廓、尤其覆盖部和/或壳体壳可以是密封的,尤其对于水、尤其在液态的聚集状态下的水是密封的。进一步附加地或备选地,外轮廓、尤其覆盖部和壳体壳可以相对彼此密封以防水、尤其在液态的聚集状态下的水。进一步附加地或备选地,密封绳可以是环绕的密封件、尤其无尽地环绕的密封件。
18.在本发明的一种改进方案中,屏幕装置具有至少一个光源、尤其所述至少一个光源和/或操控电子设备、尤其所述操控电子设备,用于在屏幕面中产生光学输出、尤其所述光学输出。户外土地加工机器人具有屏幕壳体、尤其所述屏幕壳体和空气调节膜(klimamembran)。至少一个光源和/或操控电子设备尤其完全地布置或容纳在屏幕壳体的容纳空间、尤其所述和/或内部的容纳空间中。空气调节膜对于从容纳空间中出来的水蒸气是可透过的和/或为了容纳空间与环境大气的压力平衡是可透过的。这一方面实现了上述功能,并且另一方面实现了简单和/或良好地保护至少一个光源和/或操控电子设备免受在液态的聚集状态下的水的影响、尤其在容纳空间或屏幕壳体外的水的影响。尤其地,空气调节膜可以对于在液态的聚集状态下进入容纳空间中的水是不可透过的或阻隔的。附加地或备选地,术语“湿气阻隔膜(n
ä
ssesperrmembran)”可以与术语“空气调节膜”同义使用。进一步附加地或备选地,环境大气可以是在容纳空间或屏幕壳体外的环境大气。
19.在本发明的一种改进方案中,屏幕装置在外轮廓、尤其覆盖部的至少在上侧的表面、尤其所述至少在上侧的表面处限定或具有屏幕面。外轮廓、尤其覆盖部沿着其表面尤其在所有方向上在屏幕面和/或至少一个光源和/或操控电子设备和/或壳体壳和/或容纳空间处,以及超出屏幕面和/或至少一个光源和/或操控电子设备和/或壳体壳和/或容纳空间是无界面的,尤其超出至少1cm(厘米)、尤其至少2cm是无界面的。这实现了简单和/或良好地密封屏幕装置和/或尤其因此简单和/或良好地保护屏幕装置、尤其至少一个光源和/或操控电子设备免受外部环境影响(尤其污物和/或水)、尤其在容纳空间或屏幕壳体外的环境影响。尤其地,覆盖部可以是单件或一件式的。附加地或备选地,术语“无间断”、“无过渡”、“连贯”或“无阶梯”可用于术语“无界面(grenzfl
ä
chenfrei)”。进一步附加地或备选地,外轮廓、尤其覆盖部可以直至其端部或边缘和/或超出最大50cm、尤其最大25cm、尤其最大10cm是无界面的。
20.在本发明的一种改进方案中,户外土地加工机器人具有冷却体,用于冷却屏幕装置、尤其至少一个光源和/或操控电子设备。冷却体布置在屏幕装置下面。尤其地,冷却体限定或具有冷却体面。在户外土地加工机器人的俯视图中,冷却体面的大小是或占据轮廓面的大小的至少2.5%、尤其至少5%、尤其至少7.5%和/或相应于、尤其等于屏幕面的大小。这实现热减少或热消散或热导出、尤其被动的热减少或热消散或热导出,尤其地其对于屏幕装置在该大小下在室外(通常在直接的太阳照射的情况下)的鲁棒运行可以是有利的。尤其地,冷却体可以布置在工作面和/或行驶平面和/或土地面上面。附加地或备选地,冷却体面的平行于工作面和/或行驶平面和/或土地面和/或轮廓面的大小可以是轮廓面的大小的至少2.5%、尤其至少5%、尤其至少7.5%和/或相应于、尤其等于屏幕面的大小。进一步附加地或备选地,冷却体面的大小可以是轮廓面的大小的最大100%、尤其最大50%、尤其最大25%。进一步附加地或备选地,冷却体可以至少部分地或完全地由铝组成。进一步附加地或备选地,壳体壳可以具有冷却体或至少部分地、尤其完全地由冷却体形成。
21.在本发明的一种改进方案中,外轮廓具有至少在上侧的覆盖部、尤其所述至少在
上侧的覆盖部。户外土地加工机器人具有行驶机架、尤其所述行驶机架。覆盖件关于行驶机架可运动地支承,尤其直接地可运动地支承。尤其地,户外土地加工机器人具有运动传感器装置。运动传感器装置构造用于检测覆盖部关于行驶机架的覆盖部运动或由覆盖部运动引起的运动。尤其地,冷却体承载运动传感器装置的传感器部分、尤其磁体。这实现了通过由于行驶运动、尤其在行驶方向上的行驶运动引起的覆盖部运动来检测障碍物,并且实现了检测覆盖部与障碍物的接触、尤其直接的接触。尤其地,行驶机架可以具有至少一个被驱动的滚轮和至少一个不被驱动的滚轮用于户外土地加工机器人的行驶运动、尤其在工作面上的行驶运动。至少所述不被驱动的滚轮可以在行驶方向上处于、尤其布置在至少所述被驱动的滚轮之前。附加地或备选地,运动传感器装置可以是电气的。进一步附加地或备选地,检测可以是自动的。进一步附加地或备选地,行驶机架可以承载运动传感器装置的霍尔传感器。进一步附加地或备选地,户外土地加工机器人可以具有控制-或管控装置、尤其电气的控制-或管控装置,用于尤其自动地控制或管控户外土地加工机器人的由检测到的覆盖部运动或检测到的运动触发的保护功能。这实现了在接触到障碍物时控制保护功能。尤其地,户外土地加工机器人可以具有工具系统,尤其电气的和/或可控制或可管控的工具系统。工具系统可以具有加工工具、尤其所述加工工具。控制装置可以构造用于尤其自动地控制或管控、尤其停用或停止工具系统作为保护功能。附加地或备选地,户外土地加工机器人可以具有行驶系统、尤其电气的和/或可控制或可管控的行驶系统。行驶系统可以具有行驶机架。控制装置可以构造用于尤其自动地控制或管控、尤其停用或停止行驶系统作为保护功能。进一步附加地或备选地,运动传感器装置和/或控制装置可以具有计算单元(尤其处理器)和/或存储单元。
22.在本发明的一种改进方案中,户外土地加工机器人具有空气冷却回路,用于空气冷却屏幕装置、尤其至少一个光源和/或操控电子设备。空气冷却回路至少部分地、尤其完全地在屏幕装置、尤其壳体壳和/或容纳空间和/或冷却体下面伸延。这实现热减少或热消散或热导出、尤其被动的热减少或热消散或热导出,尤其地其对于屏幕装置在该大小下在室外(通常在直接的太阳照射的情况下)的鲁棒运行可以是有利的。尤其地,空气冷却回路可以布置在工作面和/或行驶平面和/或土地面上面。附加地或备选地,冷却体可以至少部分地、尤其完全地在空气冷却回路中与空气冷却回路的空气接触地布置和/或与屏幕装置、尤其至少一个光源和/或操控电子设备接触。
23.在本发明的一种设计方案中,户外土地加工机器人具有行驶机架、尤其所述行驶机架。空气冷却回路至少部分地、尤其完全地在屏幕装置、尤其壳体壳和/或容纳空间和/或冷却体与行驶机架之间伸延,或在其之间以通道引导。这实现了简单和/或良好地保护屏幕装置、壳体壳、容纳空间和/或冷却体免受外部环境影响(尤其污物和/或水)、尤其在行驶机架和/或加工工具下面的环境影响。尤其地,户外土地加工机器人、尤其空气冷却回路可以在行驶机架之前且尤其在行驶机架下面具有空气开口,并且在行驶机架之后且尤其在行驶机架下面具有另外的空气开口。尤其地,至少在上侧的覆盖部可以向下敞开。
24.在本发明的一种改进方案中,户外土地加工机器人具有加工工具、尤其所述加工工具。加工工具具有割草工具,尤其是割草工具。附加地或备选地,户外土地加工机器人构造为割草机器人。尤其地,割草工具可以构造为对工作面进行收割。附加地或备选地,割草工具可以具有至少一个收割线、至少一个塑料刀、至少一个金属刀和/或具有至少一个切割
棱边和/或具有至少一个切割齿的金属切割片。进一步附加地或备选地,割草机器人可以是覆地物收割机器人(mulchm
ä
hroboter)。
25.在本发明的一种改进方案中,户外土地加工机器人具有温度-和/或辐照度传感器装置。温度-和/或辐照度传感器装置构造用于检测屏幕装置的温度参量、尤其温度参量的值和/或在户外土地加工机器人的环境、尤其外部环境中的辐照度参量、尤其辐照度参量的值。屏幕装置具有操控电子设备、尤其所述操控电子设备。操控电子设备构造用于根据检测到的温度参量和/或检测到的辐照度参量来操控或管控屏幕装置的辐射功率、尤其辐射功率的值。这实现了自适应辐射功率,尤其用于在直接的太阳照射的情况下提高辐射功率。尤其地,术语“亮度”可以与术语“辐照度”或“辐射功率”同义使用。附加地或备选地,温度-和/或辐照度传感器装置可以是电气的。进一步附加地或备选地,检测和/或操控可以是自动的。
26.在本发明的一种改进方案中,屏幕装置构造用于光学输出关于户外土地加工机器人的至少一个状态(尤其状态的值)的至少一个用户可感知的信息、尤其信息的内容。尤其地,术语“以信号指示”或“显示”可以与术语“输出”同义使用。
27.在本发明的一种改进方案中,屏幕装置具有至少十乘至少十的屏幕像素,尤其分别乘至少三个基本颜色子像素和/或以矩阵布置。这实现简单图形的光学输出。尤其地,屏幕像素、尤其基本颜色子像素是可单独操控或可管控的。附加地或备选地,至少三个基本颜色子像素可以是红色(r)、绿色(g)和蓝色(b)。
28.在本发明的一种改进方案中,屏幕装置具有至少十乘至少十的光源用于在屏幕面中产生光学输出、尤其所述光学输出。这实现简单图形的光学输出。尤其地,光源是可单独操控或可管控的和/或是电气的。附加地或备选地,尤其在户外土地加工机器人的俯视图中,至少十乘至少十的光源可以具有或限定设立面。尤其在户外土地加工机器人的俯视图中,设立面的大小可以是或占据屏幕面的大小的至少5%、尤其至少7.5%和/或相应于、尤其等于屏幕面的大小。附加地或备选地,设立面的平行于工作面域和/或行驶平面和/或土地面和/或轮廓面的大小可以是轮廓面的大小的至少5%、尤其至少7.5%和/或相应于、尤其等于屏幕面的大小。进一步附加地或备选地,设立面的大小可以是轮廓面的大小的最大100%、尤其最大50%、尤其最大25%。
29.在本发明的一种改进方案中,屏幕装置具有以至少一个发光二极管、尤其rgb发光二极管的形式的至少一个光源、尤其所述至少一个光源,用于在屏幕面中产生光学输出、尤其所述光学输出。
附图说明
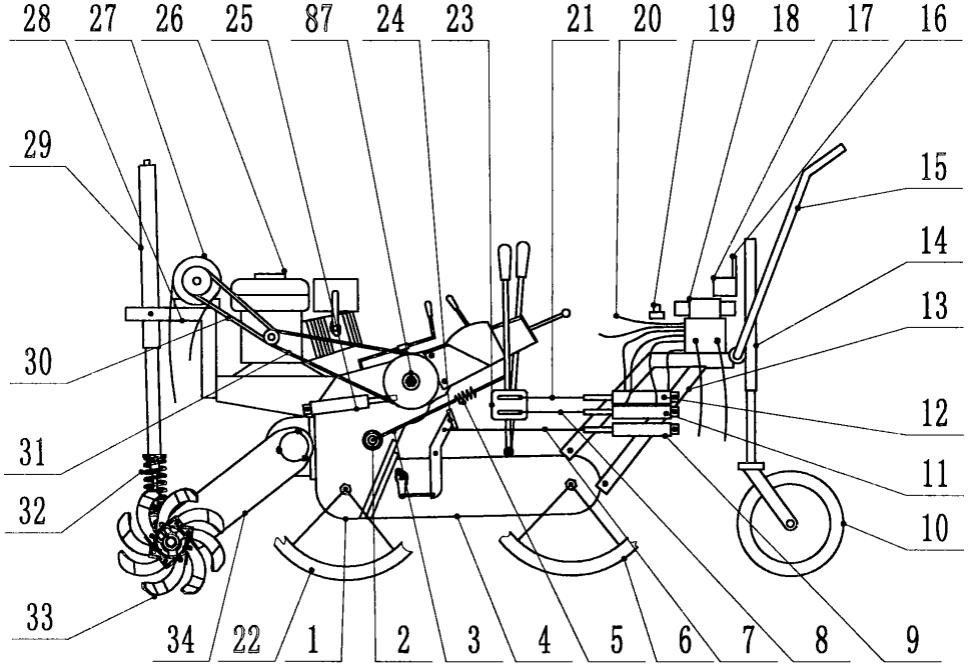
30.本发明的另外的优点和方面由权利要求书和对本发明的实施例的描述产生,下面借助附图对所述实施例进行阐释。其中:图1示出了根据本发明的自主的移动式户外土地加工机器人的俯视图,该户外土地加工机器人具有可见的屏幕装置,图2从左边示出了图1的户外土地加工机器人的侧视图,图3从左边示出了图1的户外土地加工机器人的剖切的侧视图,图4从左前上方示出了图1的户外土地加工机器人的透视图,
图5从左前上方示出了图1的户外土地加工机器人的的剖切的透视图,图6示出了图1的尤其户外土地加工机器人的覆盖部的底视图,图7从左前上方示出了图1的户外土地加工机器人的覆盖部的透视图,该户外土地加工机器人具有可见的屏幕装置,图8从右前下方示出了图1的尤其户外土地加工机器人的覆盖部的透视图,以及图9从右前上方示出了图1的户外土地加工机器人的透视图,该户外土地加工机器人具有屏幕装置,该屏幕装置光学输出关于户外土地加工机器人的不同状态的不同的用户可感知的信息。
具体实施方式
31.图1至图5和图9示出了根据本发明的自主的移动式户外土地加工机器人1。户外土地加工机器人1具有至少在上侧的外轮廓2和屏幕装置4,如图7中所示。在户外土地加工机器人1俯视图中或从上方观察户外土地加工机器人1或在正交于户外土地加工机器人1的工作面和/或行驶平面和/或土地面的尤其竖直的方向-z上,外轮廓2具有轮廓面3。屏幕装置4具有屏幕面5。在户外土地加工机器人1的俯视图中屏幕面5的大小5w是轮廓面3的大小3w的至少5%、在所示的实施例中至少7.5%,如图1中所示。
32.详细地,屏幕装置4具有至少一个光源7用于在屏幕面5中产生光学输出bi,尤其产生光学输出,如图7和图9中所示。至少一个光源7尤其在方向-z上布置在外轮廓2下面。屏幕装置4在外轮廓2的至少在上侧的表面8处具有屏幕面5。外轮廓2在所示实施例中至少在屏幕面5处是半透明的或在备选的实施例中是透明的。
33.此外,屏幕装置4具有至少一个光源7和/或操控电子设备9用于在屏幕面5中产生光学输出bi,如图3、图5和图7中所示,尤其产生其。
34.附加地,户外土地加工机器人1具有壳体壳10。壳体壳10和外轮廓2形成屏幕壳体11。至少一个光源7和/或操控电子设备9布置在屏幕壳体11的容纳空间12中。在所示的实施例中,外轮廓2和壳体壳10相对彼此密封,在所示的实施例中借助于密封绳13相对彼此密封。
35.尤其地,密封绳13置入到壳体壳10中环绕的槽、尤其无尽地环绕的槽中。
36.附加地或备选地,户外土地加工机器人1具有屏幕壳体11和空气调节膜14。至少一个光源7和/或操控电子设备9布置在屏幕壳体11的容纳空间12中。空气调节膜14对于从容纳空间12中出来的水蒸气是可透过的和/或为了容纳空间12与环境大气100a的压力平衡是可透过的。
37.此外,屏幕装置4在外轮廓2的至少在上侧的表面8处具有屏幕面。外轮廓2沿着其表面8尤其在尤其分别正交于方向z的尤其水平的方向x和/或尤其水平的方向y上在屏幕面5和/或至少一个光源7和/或操控电子设备9和/或壳体壳10和/或容纳空间12处,以及超出屏幕面5和/或至少一个光源7和/或操控电子设备9和/或壳体壳10和/或容纳空间12是无界面的,在所示实施例中超出至少1cm是无界面的。
38.户外土地加工机器人1还具有冷却体15用于冷却屏幕装置4、尤其至少一个光源7和/或操控电子设备9,尤其冷却其,如图3、图5、图6和图8中所示。冷却体15尤其是在方向-z上布置在屏幕装置4下面。在所示的实施例中,冷却体15具有冷却体面16。在户外土地加工
机器人1的俯视图中冷却体面16的大小16w是轮廓面3的大小3w的至少2.5%、尤其至少5%、在所示的实施例中至少7.5%和/或相应于、在所示的实施例中等于屏幕面5的大小5w。
39.此外,外轮廓2具有至少在上侧的覆盖部6。户外土地加工机器人1具有行驶机架17。覆盖部6关于行驶机架17可运动地支承。在所示的实施例中,户外土地加工机器人1具有运动传感器装置19,如图3和图5中所示。运动传感器装置19构造用于检测覆盖部6关于行驶机架17的覆盖部运动或由覆盖部运动引起的运动,尤其检测其。在所示的实施例中,冷却体15承载运动传感器装置19的传感器部分20、在所示的实施例中为磁体20',如图3、图5、图6和图8中所示。
40.此外,户外土地加工机器人1具有空气冷却回路21用于空气冷却屏幕装置4、尤其至少一个光源7和/或操控电子设备9,尤其冷却其,如图3至图6和图8中所示。空气冷却回路21至少部分地尤其在方向-z上在屏幕装置4、在所示的实施例中壳体壳10和/或容纳空间12和/或冷却体15下面伸延。
41.详细地,户外土地加工机器人1具有行驶机架17。空气冷却回路21至少部分地在屏幕装置4、尤其壳体壳10和/或容纳空间12和/或冷却体15与行驶机架17之间伸延。
42.此外,户外土地加工机器人1具有加工工具18,如图3和图5中所示。加工工具18具有割草工具18'。附加地或备选地,户外土地加工机器人1构造为割草机器人1'。
43.此外,户外土地加工机器人1具有温度-和/或辐照度传感器装置22,如图3和图5中所示。温度-和/或辐照度传感器装置22构造用于检测屏幕装置4的温度参量tg和/或在户外土地加工机器人1的环境100中的辐照度参量bg,尤其检测其。屏幕装置4具有操控电子设备9。操控电子设备9构造用于根据检测到的温度参量tg和/或检测到的辐照度参量bg来操控屏幕装置的辐射功率sl,尤其操控其,如图9中所示。
44.此外,屏幕装置4构造用于光学输出关于户外土地加工机器人1的至少一个状态的至少一个用户可感知的信息info,尤其输出其,例如在图9a)中状态“准备好运行”和在图9b)中状态“未准备好运行”或“错误”。
45.此外,屏幕装置4具有至少十乘至少十、在所示的实施例中十六乘十六的屏幕像素23,在所示的实施例中分别乘至少三个基本颜色子像素24和/或以矩阵25布置,如图7和图9中所示。
46.此外,屏幕装置4具有至少十乘至少十、在所示的实施例中十六乘十六的光源7,用于在屏幕面5中产生光学输出bi。
47.此外,屏幕装置4具有以至少一个发光二极管7'、在所示的实施例中rgb发光二极管7''的形式的至少一个光源7,用于在屏幕面5中产生光学输出bi。
48.此外,屏幕装置4具有至少一个反射器、尤其用于至少一个光源7的反射器。
49.附加地或备选地,屏幕装置4具有电路板、尤其平坦的电路板,尤其地该电路板承载至少一个光源7和/或操控电子设备9。
50.进一步附加地或备选地,屏幕装置4具有导热垫、尤其用于所述至少一个光源7和/或操控电子设备9的导热垫。
51.进一步附加地或备选地,户外土地加工机器人可以具有至少一个另外的屏幕装置、尤其以“前条带”和/或“后条带”的形式的屏幕装置。
52.进一步附加地或备选地,户外土地加工机器人可以借助于边界线导航和/或无线
地、尤其借助于gnss导航。
53.进一步附加地或备选地,户外土地加工机器人可以具有摄像头装置和/或超声装置用于检测障碍物。
54.在所示的实施例中,轮廓面3为330027mm
²
(平方毫米)。附加地或备选地,屏幕面5为25077mm
²
。进一步附加地或备选地,屏幕面5位于轮廓面3的中心,尤其比轮廓面3的端部或边缘更靠近中心。进一步附加地或备选地,屏幕装置4也可以被称为中央led矩阵。
55.如所示的和上面阐释的实施例清楚地表明,本发明提供了一种有利的自主的移动式户外土地加工机器人,该户外土地加工机器人具有改善的特性,尤其实现较高的用户友好性。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。