技术特征:
1.一种计算机实施的方法,其包括:接收电动车辆“ev”充电点的多个候选位置的指示;确定所述多个候选位置的静态地图特征;使用机器学习模型处理所述多个候选位置和静态地图特征,针对现有ev充电点位置、现有ev充电点静态地图特征和现有ev充电点利用率来训练所述机器学习模型;基于所述机器学习模型,确定所述多个候选位置中的每个侯选位置处相应ev充电点的相应预测利用率;以及生成包含所述多个候选位置的地图表示,其中基于所述多个候选位置中的所述候选位置中的每个侯选位置处的所述相应ev充电点的所述相应预测利用率来对所述候选位置进行视觉区分。2.根据权利要求1所述的方法,其还包括:基于其对应位置处的ev充电点的相应预测利用率来对ev充电点的所述多个候选位置进行排序。3.根据权利要求1所述的方法,其中使用一个或多个突出效果以表示所述对应位置处的ev充电点的所述相应预测利用率来对所述多个候选位置中的候选位置进行视觉区分。4.根据权利要求1所述的方法,其中所述多个候选位置中的候选位置的所述静态地图特征形成所述候选位置的候选位置向量,其中所述候选位置向量被输入到所述机器学习模型以确定所述候选位置处的ev充电点的所述预测利用率。5.根据权利要求1所述的方法,其还包括以下一个或多个:针对所述多个侯选位置中的所述侯选位置中的每个侯选位置生成站点值,其中每个站点值基于所述相应侯选位置处的ev充电点的所述相应预测利用率;以及针对所述多个候选位置中的所述侯选位置中的每个候选位置生成推荐数目的ev充电点,其中ev充电点的所述数目基于所述相应候选位置处的ev充电点的所述相应预测利用率。6.一种计算机实施的方法,其包括:标识现有电动车辆“ev”充电点和其相应位置;确定所述现有ev充电点的所述位置的静态地图特征;确定所述现有ev充电点的利用率;针对所述现有ev充电点的所述位置的所述静态地图特征和所述现有ev充电点的所述利用率来训练机器学习模型;以及提供经过训练的所述机器学习模型以用于预测侯选位置处的ev充电点的利用率。7.根据权利要求6所述的方法,其还包括:提供候选位置和与所述候选位置相关联的静态地图特征;以及基于所述机器学习模型使用所述候选位置和与所述候选位置相关联的所述静态地图特征来确定所述候选位置处的ev充电点的预测利用率。8.根据权利要求7所述的方法,其还包括确定所述现有ev充电点的所述位置的动态特征,其中针对所述现有ev充电点的所述位置的所述静态地图特征和所述现有ev充电点的所述利用率训练所述机器学习模型包括针对所述现有ev充电点的所述位置的所述静态地
图特征和动态特征以及所述现有ev充电点的所述利用率来训练所述机器学习模型,并且将所述候选位置和与所述候选位置相关联的静态地图特征输入到所述机器学习模型包括将所述候选位置、与所述候选位置相关联的所述静态地图特征以及与所述候选位置相关联的动态特征输入到所述机器学习模型。9.根据权利要求8所述的方法,其中与所述候选位置相关联的所述静态地图特征和与所述候选位置相关联的所述动态特征形成候选位置向量,其中所述候选位置向量被输入到所述机器学习模型。10.根据权利要求9所述的方法,其中所述候选位置的所述静态地图特征包括以下中的一个或多个:关注点(poi)类别与所述候选位置的接近度、poi类别相对于所述候选位置的密度、接近所述候选位置的道路功能类别,或接近所述候选位置的人口密度。11.根据权利要求10所述的方法,其中所述候选位置的所述动态地图特征包括以下中的一个或多个:接近所述候选位置的交通密度、接近所述候选位置的天气、接近所述候选位置的人口估计值、事件信息、当日时间、星期几或一年中的季节。12.根据权利要求6所述的方法,其还包括:将ev充电点的多个候选位置和与所述候选位置相关联的静态地图特征输入到所述机器学习模型;基于所述机器学习模型,确定ev充电点的所述多个候选位置处的ev充电点的预测利用率;以及基于其对应位置处的ev充电点的相应预测利用率来对ev充电点的所述多个候选位置进行排序。13.根据权利要求12所述的方法,其还包括:基于排序的ev充电点的所述多个候选位置来从ev充电点的所述多个候选位置中标识选定位置;以及提供在所述选定位置处建立ev充电点的建议。14.根据权利要求12所述的方法,其还包括:生成涵盖所述多个候选位置的地图表示;以及基于对应位置处的ev充电点的预测利用率而提供所述多个候选位置的视觉区别。15.一种设备或计算机程序,其被配置成执行任一前述权利要求所述的方法。
技术总结
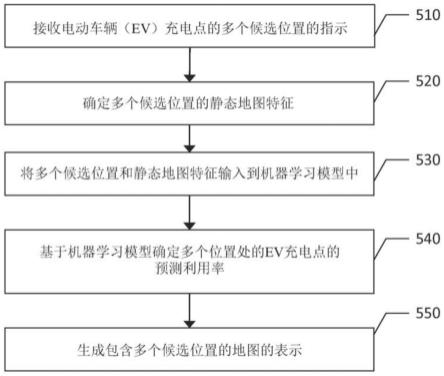
本文中所描述的实施例涉及预测电动车辆(EV)充电点的利用率。方法可包含:接收EV充电点的多个候选位置的指示;确定所述多个候选位置的静态地图特征;将所述多个候选位置和静态地图特征输入到机器学习模型中,其中针对现有EV充电点位置、现有EV充电点静态地图特征和现有EV充电点利用率来训练所述机器学习模型;基于所述机器学习模型来确定所述多个候选位置处的EV充电点的预测利用率;以及生成包含所述多个候选位置的地图表示,其中所述多个候选位置中的候选位置基于所述候选位置处的EV充电点的相应预测利用率来进行视觉区分。点的相应预测利用率来进行视觉区分。点的相应预测利用率来进行视觉区分。
技术研发人员:耶罗默
受保护的技术使用者:赫尔环球有限公司
技术研发日:2021.11.04
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。