技术特征:
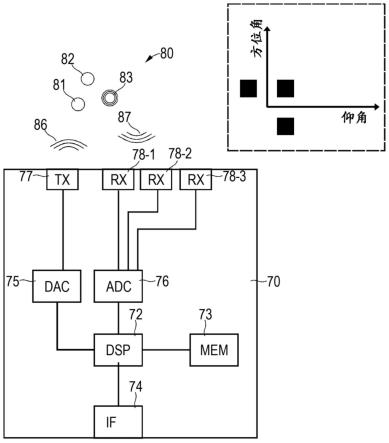
1.一种计算机实现的方法,包括:-获取包括对象(83)的场景(80)的雷达测量的一个或多个位置时间谱图(101-104,101*-104*),以及-基于所述一个或多个位置时间谱图(101-104,101*-104*)并且基于变分自动编码器神经网络算法(111)的特征嵌入(149),预测由所述对象(83)执行的手势(501-510)的手势类(520)。2.根据权利要求1所述的计算机实现的方法,其中所述手势类(520)是基于所述变分自动编码器神经网络算法(111)的所述特征嵌入(149)的分布的均值(144)与在所述特征嵌入(149)的特征空间(200)中预定义的一个或多个区域(211-213)的比较来预测的。3.根据权利要求2所述的计算机实现的方法,还包括:-监测针对所述一个或多个位置时间谱图的多个集合而获取的所述变分自动编码器神经网络算法(111)的所述特征嵌入(149)的所述分布的所述均值(144)的群集形成,所述群集形成在所述一个或多个预定义区域(211-213)之外,以及-基于对所述群集形成的所述监测,确定所述特征空间(200)中的另外的预定义区域以包围相应群集(214)。4.根据前述权利要求中任一项所述的计算机实现的方法,其中所述一个或多个位置时间谱图(101-104,101*-104*)通过基于至少一个触发事件对所述雷达测量的测量数据(64)进行时间选通而获取。5.根据权利要求4所述的方法,其中所述至少一个触发事件包括由所述测量数据(64)捕获的位置可观察量的变化速率与至少一个预定义阈值之间的比较。6.根据权利要求4或5所述的计算机实现的方法,其中所述至少一个触发事件包括手势检测算法的输出。7.根据前述权利要求中任一项所述的计算机实现的方法,其中所述一个或多个位置时间谱图(101-104,101*-104*)选自由以下项组成的组:距离时间谱图、速度时间谱图、方位角时间谱图和仰角时间谱图。8.根据前述权利要求中任一项所述的计算机实现的方法,其中所述一个或多个位置时间谱图(101-104,101*-104*)包括一个或多个原始位置时间谱图(101-104),其中所述变分自动编码器神经网络算法(111)已经被训练以重构一个或多个已滤波位置时间谱图(101*-104*)。9.一种训练(3005)变分自动编码器神经网络算法(111)的计算机实现方法,所述变分自动编码器神经网络算法(111)用于预测由场景(80)的对象(83)执行的手势(501-510)的手势类(520),所述手势类(520)是从多个手势类(520)中选择的,所述计算机实现的方法包括:-获取包括所述对象(83)的所述场景(80)的雷达测量的一个或多个训练位置时间谱图(101-104,101*-104*)的多个训练集合(109),所述多个训练集合(109)中的每个训练集合与指示相应手势类(520)的相应真实标签(107)相关联,以及
‑
基于所述多个训练集合(109)和相关联的真实标签(107)训练所述变分自动编码器神经网络算法(111)。10.根据权利要求9所述的计算机实现的方法,其中所述变分自动编码器神经网络算法(111)的所述训练使用至少一个损失(192),所述至少一个损失(192)是基于以下项之间的至少一个统计距离而确定的:针对与所述多个手势类(520)中的第一手势类(520)相关联的所述多个训练集合(109)中的第一训练集合而获取的所述变分自动编码器神经网络算法(111)的特征嵌入(149)的分布,以及针对与所述第一手势类(520)或所述多个手势类(520)中的第二手势类(520)中的至少一项相关联的所述多个训练集合(109)中的至少一个第二训练集合而获取的所述变分自动编码器神经网络算法(111)的所述特征嵌入(149)的所述至少一个分布的至少一个均值(144)。11.根据权利要求10所述的计算机实现的方法,其中所述至少一个损失(192)包括基于第一统计距离和第二统计距离而确定的统计距离三元组损失,所述第一统计距离是针对所述多个训练集合(109)中的锚点训练集合而获取的所述变分自动编码器神经网络算法(111)的所述特征嵌入(149)的所述分布与针对所述多个训练集合中的正训练集合而获取的所述变分自动编码器神经网络算法(111)的所述特征嵌入(149)的所述分布的所述均值(144)之间的距离,所述第二统计距离是针对所述锚点训练集合而获取的所述变分自动编码器神经网络算法(111)的所述特征嵌入(149)的所述分布与针对所述多个集合中的负训练集合(109)而获取的所述变分自动编码器神经网络算法(111)的所述特征嵌入(149)的所述分布的所述均值(144)之间的距离。12.根据权利要求10或11所述的计算机实现的方法,其中所述至少一个损失(192)包括统计距离中心损失,所述统计距离中心损失是基于与所述第一手势类(520)相关联的类分布与针对与所述第一手势类(520)相关联的所述多个训练集合(109)中的所有训练集合而获取的所述变分自动编码器神经网络算法(111)的所述特征嵌入(149)的所述分布的均值之间的统计距离而确定的。13.根据权利要求10至12中任一项所述的计算机实现方法,其中所述统计距离是mahalanobis距离。14.根据权利要求9至13中任一项所述的计算机实现的方法,其中所述一个或多个训练位置时间谱图(101-104)包括一个或多个原始训练位置时间谱图(101-104),其中所述方法还包括:-将无迹卡尔曼滤波器应用(7005)于所述一个或多个原始训练位置时间谱图以获取一个或多个已滤波训练位置时间谱图(101*-104*),其中所述变分自动编码器神经网络算法(111)的所述训练使用至少一个重构损失(191),所述至少一个重构损失(191)基于由所述变分自动编码器神经网络算法(111)输出的所述一个或多个原始训练位置时间谱图的重构(181-184)与所述一个或多个已滤波训练
位置时间谱图(101*-104*)之间的差异。15.根据前述权利要求中任一项所述的计算机实现的方法,还包括:-基于针对与所述多个手势类(520)中的每个手势类相关联的所述训练集合(109)而获取的所述变分自动编码器神经网络算法(111)的特征嵌入(149)的类分布,确定所述特征嵌入(149)的特征空间(200)中用于手势类预测的预定义区域(211-213)。
技术总结
本公开的各实施例总体上涉及使用变分自动编码器神经网络算法的基于雷达的手势分类。公开了一种基于雷达测量的手势分类。采用变分自动编码器神经网络算法。该算法可以使用三元组损失和中心损失进行训练。对于这些损失,可以考虑统计距离。以考虑统计距离。以考虑统计距离。
技术研发人员:A
受保护的技术使用者:英飞凌科技股份有限公司
技术研发日:2022.08.11
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。