1.本实用新型涉及番茄采摘技术领域,具体为一种番茄自动采收分类装备。
背景技术:
2.番茄的果实营养丰富,具特殊风味,可以生食、烹饪、加工番茄酱/汁或整果罐藏。在种植园中,当番茄成熟时,需要人工采收或者使用专用采收分类机械设备对番茄进行采收分类的工作。
3.现有的番茄自动采收分类装备存在的缺陷是:
4.1、现有的番茄自动采收分类装备采收方式较为复杂繁琐,且容易将未成熟的番茄采收下来,使用起来较为不便;
5.2、现有的番茄自动采收分类装备不便于工作人员对番茄进行分类收集管理的工作,大多需要工作人员后续手动挑拣成色不一的番茄,不便于使用。
技术实现要素:
6.本实用新型的目的在于提供一种番茄自动采收分类装备,以解决上述背景技术中提出的问题。
7.为实现上述目的,本实用新型提供如下技术方案:一种番茄自动采收分类装备,包括机体、调节臂和底座,所述机体的内部设置有导槽,所述导槽的一端安装有调节臂,所述调节臂底部的一侧通过驱动件安装有采收爪,所述底座的顶部设置有箱体,所述箱体的内部安装有安装件,所述安装件的顶部通过调节座安装有检测台,且调节座的表面安装有马达。
8.优选地,所述安装件的一端皆通过检测杆安装有视觉摄像头。
9.优选地,所述驱动件的顶部安装有视觉检测模。
10.优选地,所述箱体表面的两侧皆固定安装有把手,且把手的外围皆设置有橡胶套。
11.优选地,所述底座底部的两侧皆安装有滚轮。
12.优选地,所述导槽的内部安装有电动导轨,且调节臂通过滑块与电动导轨连接。
13.与现有技术相比,本实用新型的有益效果是:
14.1、在调节臂通过滑块与电动导轨连接,调节臂底部的一侧通过驱动件安装有采收爪,通过导槽内的电动导轨以及滑块配合带动调节臂进行升降调节的工作,通过调节臂内的调节机构带动驱动件与采收爪进行旋转调节的工作,通过调节臂将采收爪调节至需要采收的番茄处,视觉检测模块根据番茄外表的颜色对番茄是否成熟进行判断,通过驱动件驱动采收爪将成熟的番茄摘下,紧接调节臂带动采收爪旋转,将采收爪调节至检测台顶部后采收爪松开,此时番茄则落在检测台上,从而完成自动采收的工作,优化使用过程。
15.2、通过在调节座的表面安装有马达,安装件的一端皆通过检测杆安装有视觉摄像头,当番茄落在检测台上后,通过检测杆上的视觉摄像头对番茄进行视觉检测的工作,对此番茄是否具有缺陷进行视觉检测判断,判断完成后,调节座表面的马达启动,通过马达启动
带动检测台进行旋转倾斜,若检测到此番茄良好不具有缺陷,马达则带动检测台向一侧倾斜,将番茄导入箱体内部的一侧进行管理,若检测到此番茄具有缺陷,马达则带动检测台向另一侧倾斜,将番茄导入箱体内部的另一侧进行管理,从而完成分类处理的工作,优化使用过程。
附图说明
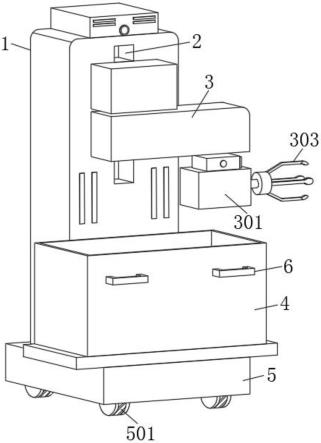
16.图1为本实用新型的立体图;
17.图2为本实用新型的内部结构示意图;
18.图3为本实用新型的主视图;
19.图4为本实用新型的安装件局部结构示意图。
20.图中:1、机体;2、导槽;3、调节臂;301、驱动件;302、视觉检测模块;303、采收爪;4、箱体;401、安装件;402、检测台;403、检测杆;404、视觉摄像头;405、调节座;406、马达;5、底座;501、滚轮;6、把手。
具体实施方式
21.下文结合附图和具体实施例对本实用新型的技术方案做进一步说明。
22.实施例一
23.如图1-4所示,本实用新型提出的一种番茄自动采收分类装备,包括机体1、调节臂3和底座5,机体1的内部设置有导槽2,导槽2的一端安装有调节臂3,导槽2的内部安装有电动导轨,且调节臂3通过滑块与电动导轨连接,调节臂3底部的一侧通过驱动件301安装有采收爪303,驱动件301的顶部安装有视觉检测模块302,底座5的顶部设置有箱体4,箱体4的内部安装有安装件401,安装件401的顶部通过调节座405安装有检测台402,且调节座405的表面安装有马达406,安装件401的一端皆通过检测杆403安装有视觉摄像头404。
24.基于实施例一的番茄自动采收分类装备工作原理是:通过导槽2内的电动导轨以及滑块配合带动调节臂3进行升降调节的工作,通过调节臂3内的调节机构带动驱动件301与采收爪303进行旋转调节的工作,通过调节臂3将采收爪303调节至需要采收的番茄处,视觉检测模块302根据番茄外表的颜色对番茄是否成熟进行判断,通过驱动件301驱动采收爪303将成熟的番茄摘下,紧接调节臂3带动采收爪303旋转,将采收爪303调节至检测台402顶部后采收爪303松开,此时番茄则落在检测台402上,从而完成自动采收的工作,优化使用过程,当番茄落在检测台402上后,通过检测杆403上的视觉摄像头404对番茄进行视觉检测的工作,对此番茄是否具有缺陷进行视觉检测判断,判断完成后,调节座405表面的马达406启动,通过马达406启动带动检测台402进行旋转倾斜,若检测到此番茄良好不具有缺陷,马达406则带动检测台402向一侧倾斜,将番茄导入箱体4内部的一侧进行管理,若检测到此番茄具有缺陷,马达406则带动检测台402向另一侧倾斜,将番茄导入箱体4内部的另一侧进行管理,从而完成分类处理的工作,优化使用过程。
25.实施例二
26.如图1-3所示,本实用新型提出的一种番茄自动采收分类装备,相较于实施例一,本实施例还包括:箱体4表面的两侧皆固定安装有把手6,且把手6的外围皆设置有橡胶套,底座5底部的两侧皆安装有滚轮501。
27.本实施例中,通过把手6可方便工作人员提起箱体4进行移动与运输工作,通过橡胶套可增加把手6与工作人员手掌的摩擦力,避免出现打滑的情况,通过滚轮501滚动可带动底座5进行移动,从而可带动设备进行移动工作。
28.上述具体实施例仅为本实用新型的几种优选的实施例,基于本实用新型的技术方案和上述实施例的相关启示,本领域技术人员可以对上述具体实施例做出多种替代性的改进和组合,本实用新型的保护范围由所附权利要求及其等同物限定。
技术特征:
1.一种番茄自动采收分类装备,包括机体(1)、调节臂(3)和底座(5),其特征在于:所述机体(1)的内部设置有导槽(2),所述导槽(2)的一端安装有调节臂(3),所述调节臂(3)底部的一侧通过驱动件(301)安装有采收爪(303),所述底座(5)的顶部设置有箱体(4),所述箱体(4)的内部安装有安装件(401),所述安装件(401)的顶部通过调节座(405)安装有检测台(402),且调节座(405)的表面安装有马达(406)。2.根据权利要求1所述的一种番茄自动采收分类装备,其特征在于:所述安装件(401)的一端皆通过检测杆(403)安装有视觉摄像头(404)。3.根据权利要求1所述的一种番茄自动采收分类装备,其特征在于:所述驱动件(301)的顶部安装有视觉检测模块(302)。4.根据权利要求1所述的一种番茄自动采收分类装备,其特征在于:所述箱体(4)表面的两侧皆固定安装有把手(6),且把手(6)的外围皆设置有橡胶套。5.根据权利要求1所述的一种番茄自动采收分类装备,其特征在于:所述底座(5)底部的两侧皆安装有滚轮(501)。6.根据权利要求1所述的一种番茄自动采收分类装备,其特征在于:所述导槽(2)的内部安装有电动导轨,且调节臂(3)通过滑块与电动导轨连接。
技术总结
本实用新型涉及番茄采摘技术领域,尤其涉及一种番茄自动采收分类装备。其技术方案包括:机体、调节臂和底座,机体的内部设置有导槽,导槽的一端安装有调节臂,调节臂底部的一侧通过驱动件安装有采收爪,底座的顶部设置有箱体,箱体的内部安装有安装件,安装件的顶部通过调节座安装有检测台,且调节座的表面安装有马达。本实用新型视觉检测模块根据番茄外表的颜色对番茄是否成熟进行判断,通过驱动件驱动采收爪将成熟的番茄摘下,紧接调节臂带动采收爪旋转,将采收爪调节至检测台顶部后采收爪松开,此时番茄则落在检测台上,从而完成自动采收的工作,优化使用过程。优化使用过程。优化使用过程。
技术研发人员:闫圣坤 姜鲁艳 史慧锋 孟谦文 张彩虹 王国强
受保护的技术使用者:新疆农业科学院农业机械化研究所
技术研发日:2022.10.26
技术公布日:2023/2/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
