1.本实用新型具体涉及一种水炮车用智能人像识别精准打击系统。
背景技术:
2.水炮车是一种警用特种装备,对处置突发性安全事件发挥着重要的作用,是武警、公安部队广泛使用维护治安的手段之一。
3.如今,国内现有的水炮车主炮在发射水柱的时候,一般都仅配有摄像系统,主炮射出的水柱是弧形抛物线形状,而摄像系统只能看清目标,并不能控制主炮让水柱精准的射向目标,因此,其喷射精度大大降低,近似于盲射,往往需要射两三次,在不断的修正、对准的情况下,才能命中目标,而打击目标又是在不断的移动,因此,更加增加了喷射命中的难度,在有限的罐体容积情况下,将会消耗更多的清水,降低了水炮车的性能,从而也没有起到震慑作用。
技术实现要素:
4.有鉴于此,本实用新型的目的是提供一种在威慑射程内具有对目标进行测距、捕捉和瞄准功能的水炮车用智能人像识别精准打击系统。
5.为了解决上述技术问题,本发明的技术方案是:
6.一种水炮车用智能人像识别精准打击系统,包括安装在水炮台上的硬件部分,以及用于控制水炮台和硬件部分的控制模块,所述硬件部分包括呈u形设置的瞄准系统支架,装配在所述瞄准系统支架一侧的瞄准器,以及装配在所述瞄准系统支架另一侧的灯光照明装置,所述瞄准系统支架包括架体,安装在架体上的传动机构,安装在所述架体两侧的、且大小一致的同步轮,分别固定安装在所述架体的两侧末端上的、带有固定轴的轴承座,装配在所述轴承座上的、且分别与瞄准器和灯光照明装置通过螺钉固定安装的从动皮带轮。
7.所述传动机构包括带链轮的传动轴,通过螺钉在所述架体的内部两侧的、用于支撑传动轴的轴承支架,通过销键固定安装在所述传动轴两端的、且位于架体的外部两侧的主动皮带轮。
8.所述瞄准器包括瞄准器铝盒,安装在所述瞄准器铝盒内部的变倍摄像机,固定安装在所述变倍摄像机前端上方的激光测距仪,安装在所述瞄准器铝盒内底部的雨刷器。
9.所述雨刷器包括带微型电机的雨刷器基座,装配在所述雨刷器基座上的雨刷器传动轴,装配在所述雨刷器传动轴一端的、且与雨刷器基座固定安装的雨刷器传动轴联接轴套,安装在所述雨刷器传动轴另一端的、且与雨刷器基座固定安装的雨刷器传动轴锁紧圈,以及设置在所述雨刷器传动轴延伸出瞄准器铝盒外部的、用于清理镜面上杂物和雨水的雨刷头。
10.所述灯光照明装置包括照明器铝盒,通过螺钉固定安装在所述照明器铝盒的内顶部和内底部上的灯座,以及固定安装在所述灯座上的led灯体。
11.所述控制模块为采用keli-c语言完成的软件编程控制硬件部分进行运行的瞄准
系统,包括stc15w系列的单片机控制板,与所述单片机控制板的输入端进行连接的rs485通讯模块、瞄准器霍尔位置传感器、水平运动霍尔位置传感器和垂直运动霍尔位置传感器,与所述单片机控制板的输出端进行连接的usb-ttl模块,与所述单片机控制板双向连接的摄像机变倍rs485通讯模块。
12.所述usb-ttl模块的输出端连接用于进行视频输出的工控机。
13.所述工控机的输出端连接用于显示图像的、规格为13.3寸的显示器。
14.所述控制模块为采用keli-c语言完成的软件编程控制硬件部分进行运行的瞄准系统,搭配遥控手柄和led显示屏,采用模块化的运行方法,与各子程序实现各部分功能和过程入口,完成模拟量电压输入功能,与pwm脉宽调制控制。
15.所述控制模块为利用软件编程控制硬件部分进行运行的瞄准系统,通过瞄准器进行视频采集来获取用户的图像,再利用瞄准系统对瞄准对象所在的位置、角度进行计算分析,而后与算法数据库里已有的范本进行比对,最终判断出视频中人、车、动物信息,实现人、车、动物坐标提取,人、车、动物跟踪和人、车、动物特征提取。
16.本实用新型技术效果主要体现在以下方面:该系统利用硬件部分和控制模块结合,在作用于水炮车的过程中,使得瞄准系统支架同时控制瞄准器和灯光照明装置配合水炮车进行打击对象的精准识别、精准追踪和精准提取,有效控制水炮车的水炮进行精准打击目标,因此,该系统在威慑射程内具有对目标进行测距、捕捉和瞄准的功能。
附图说明
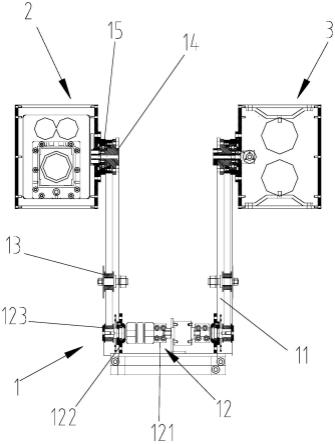
17.图1为本实用新型一种水炮车用智能人像识别精准打击系统的结构图;
18.图2为图1中瞄准器的侧视图;
19.图3为图1中灯光照明装置的结构图;
20.图4为控制模块的框架图;
21.图5为控制模块结合水炮车的框架图;
22.图6为两轴霍尔传感器控制水炮垂直运动的电路图;
23.图7为两轴霍尔传感器控制水炮水平运动的电路图;
24.图8为pwm电机驱动电路图;
25.图9为候选框密度均衡策略的示意图;
26.图10为数据并行架构的示意图;
27.图11为模型并行架构的示意图;
28.图12为传统深度学习并行算法的原理图;
29.图13为本发明的模型双并行架构的模型并行处理原理图。
具体实施方式
30.以下结合附图,对本实用新型的具体实施方式作进一步详述,以使本发明技术方案更易于理解和掌握。
31.在本实施例中,需要理解的是,术语“中间”、“上”、“下”、“顶部”、“右侧”、“左端”、“上方”、“背面”、“中部”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特
定的方位构造和操作,因此不能理解为对本发明的限制。
32.另,在本具体实施方式中如未特别说明部件之间的连接或固定方式,其连接或固定方式均可为通过现有技术中常用的螺栓固定或钉销固定,或销轴连接等方式,因此,在本实施例中不在详述。
33.实施例
34.一种水炮车用智能人像识别精准打击系统,包括安装在水炮台上的硬件部分,以及用于控制水炮台和硬件部分的控制模块。
35.如图1所示,所述硬件部分包括呈u形设置的瞄准系统支架1,装配在所述瞄准系统支架1一侧的瞄准器2,以及装配在所述瞄准系统支架1另一侧的灯光照明装置3,所述瞄准系统支架1包括架体11,安装在架体11上的传动机构12,安装在所述架体11两侧的、且大小一致的同步轮13,分别固定安装在所述架体11的两侧末端上的、带有固定轴的轴承座14,装配在所述轴承座14上的、且分别与瞄准器2和灯光照明装置3通过螺钉固定安装的从动皮带轮15,所述传动机构12包括带链轮的传动轴121,通过螺钉在所述架体11的内部两侧的、用于支撑传动轴121的轴承支架122,通过销键固定安装在所述传动轴121两端的、且位于架体11的外部两侧的主动皮带轮123,具体的,主动皮带轮123与从动皮带轮15通过三角皮带连接,在电机通过链条带动传动轴121后,能够同时带动瞄准器2和灯光照明装置3进行垂直运动,配合水炮台进行调整瞄准的角度。
36.如图2所示,所述瞄准器2包括瞄准器铝盒21,安装在所述瞄准器铝盒21内部的32变倍摄像机22,固定安装在所述32变倍摄像机22前端上方的激光测距仪23,安装在所述瞄准器铝盒21内底部的雨刷器24。所述雨刷器24包括带微型电机的雨刷器基座241,装配在所述雨刷器基座241上的雨刷器传动轴242,装配在所述雨刷器传动轴242一端的、且与雨刷器基座241固定安装的雨刷器传动轴联接轴套243,安装在所述雨刷器传动轴242另一端的、且与雨刷器基座241固定安装的雨刷器传动轴锁紧圈244,以及设置在所述雨刷器传动轴242延伸出瞄准器铝盒21外部的、用于清理镜面上杂物和雨水的雨刷头245。
37.如图3所示,所述灯光照明装置3包括照明器铝盒31,通过螺钉固定安装在所述照明器铝盒31的内顶部和内底部上的灯座32,以及固定安装在所述灯座32上的led灯体33。
38.如图4所示,所述控制模块为采用keli-c语言完成的软件编程控制硬件部分进行运行的瞄准系统,包括stc15w系列的单片机控制板,与所述单片机控制板的输入端进行连接的rs485通讯模块、瞄准器霍尔位置传感器、水平运动霍尔位置传感器和垂直运动霍尔位置传感器,与所述单片机控制板的输出端进行连接的usb-ttl模块,与所述单片机控制板双向连接的摄像机变倍rs485通讯模块,所述rs485通讯模块的输入端连接激光测距仪。所述usb-ttl模块的输出端连接用于进行视频输出的工控机。所述工控机的输出端连接用于显示图像的、规格为13.3寸的显示器。
39.如图5所示,所述控制模块为采用keli-c语言完成的软件编程控制硬件部分进行运行的瞄准系统,搭配遥控手柄和led显示屏,采用模块化的运行方法,与各子程序实现各部分功能和过程入口,完成模拟量电压输入功能,与pwm脉宽调制控制,具体为:
40.如图6-7所示,当水炮台运动操控遥控手柄在静止状态时,两轴霍尔传感器分别在中点电位,即x轴和y轴,两轴霍尔传感器的供电电源为0-5v稳压电源,中点电位为2.5v,也是停止位;此时两轴霍尔传感器的输出电压为0v-2.5v-5v,遥控手柄的起始位置为2.5v,当
操控遥控手柄时,电压由2.5v-0v逐渐变化,或2.5v-5v逐渐变化,此电压输入至stc12c系列的单片机控制板,该单片机控制板具有a/d功能的端口,经处理后由单片机控制板的输出端口输出pwm信号得到相应的电机速度和方向,控制电机正转或反转,调整电机运行速度的慢或快;操控遥控手柄进行x轴水平运动、y轴水平运动或垂直方向运动,操控遥控手柄从中间位置向左移动,或向下,两轴霍尔传感器的电压从 2.5v 逐渐变化到 0v,这一电压变化值经 in1、in2 输入,滤波后到单片机i/o口的p1.0口和p1.1口由单片机处理后从p0.2、p0.3,水平运动时为p0.4、垂直运动时为p0.5,输出与转速相应的pwm脉冲;
41.如图8所示,pwm脉冲的频率为20khz,占空比2-98,以单片机控制板i/o口p0.2和p0.3输出为例,其中一输出口与转速相应的pwm脉冲,另一输出口低电平。
42.所述控制模块为利用软件编程控制硬件部分进行运行的瞄准系统,通过瞄准器2进行视频采集来获取用户的图像,再利用瞄准系统对瞄准对象所在的位置、角度进行计算分析,而后与算法数据库里已有的范本进行比对,最终判断出视频中人、车、动物信息,实现人、车、动物坐标提取,人、车、动物跟踪和人、车、动物特征提取,具体为:
43.当进行人、车、动物坐标提取时,人、车、动物检测功能识别图像或视频流中的人、车、动物区域,进行检测后返回检测到的人、车、动物矩形框坐标,其中,检测功能基于神经网络算法完成精准检测任务,该网络分为两部分:rapidly digested convolutional layer(rdcl)快速融合卷积模块和multiple scale convolutional layer(mscl)多尺度变换卷积模块。
44.快速融合卷积模块(rdcl)运用卷积及池化操作,快速获取图像的特征图,并采用crelu函数加速激活网络,完成毫秒级特征提取任务。多尺度变换卷积模块(mscl)结合网络各卷积层输出的特征图,直接输出到损失函数来进行累加学习,从而进行更为精准的人、车、动物检测任务,该模块采用了inception结构来增加神经网络的宽度与深度,可以在不同尺度的特征图上获取人、车、动物位置信息,进而在图像或视频流中精确地框出人、车、动物位置。
45.同时,检测神经网络算法训练模型所使用的损失函数采用多任务损失函数multi-task loss,该函数可以帮助网络高效快速的同时完成单人、车、动物或多人、车、动物预测框挑选以及最终单个或多个人、车、动物框精确位置的调整,但由于深度学习特征提取后,人、车、动物在特征图上的映射较小,原始网络生成的相应人、车、动物预测框数量较少,会导致训练不足,检测结果不理想。为了更好地解决此类普遍检测问题,检测功能结合候选框密度均衡策略anchor densification strategy(ads)去解决网络对小目标检测不理想的问题,其原理过程如图9所示,即将候选框的密度以黑点为中心进行均衡分布,增加预测框的数量,有利于提高检测结果。
46.当进行人、车、动物跟踪时,在视频流中,人、车、动物在不同时刻会出现不同位置偏移,并且会出现光照变化,遮挡,旋转,变形,模糊等不利于跟踪的因素出现。跟踪技术采用孪生网络siamese network(sn)结合视频流中从之前帧图像中已提取出的人、车、动物特征来辅助改善不利于人、车、动物跟踪的因素,进而精确定位并追踪人、车、动物区域位置,随着人、车、动物位置的不断变化,可以迅速定位人、车、动物位置,适应不同姿态,光照,遮挡,模糊等复杂的实际场景。
47.当进行人、车、动物特征提取时,特征提取算法将对上述功能模块所检测到的每张
人、车、动物提取其独一无二的特征值,提取到的每一个人、车、动物的特征值都为一个p维(》2048)的复杂向量,通过本领域技术人员特征提取算法,每张人脸的独特信息都通过一个高维向量被描述出来,以保证其特殊性,从而在根本上极大的降低误检概率。
48.一般基于神经网络的特征提取算法效果好,可靠性高,但具有模型参数多,计算量大,训练数据的规模大,需要消耗较多的计算资源等问题,在实际应用场景中对硬件需求较高并且速度较慢。本领域技术人员采用的模型双并行架构,其主要特点体现在数据与模型并行处理。可以在保持原有深度学习效果的同时,大幅度提升模型学习效率,减少gpu占用率,从而降低计算学习成本。其具体内容如下。
49.如图10所示,数据并行架构:
50.数据并行是指对训练数据做分割,同时采用多个模型实例,对多个分片的数据并行训练。通常由一个参数服务器来帮助完成,通过参数交换达成数据的并行。在训练的过程中,多个训练过程相互独立,训练的结果,即模型的变化量δw需要汇报给参数服务器,用过参数服务器更新为最新的模型w
’ꢀ
= w
ꢀ–
η
∙
δw,然后将最新的模型w’分发给训练程序,以便从新的起点开始训练。
51.如图11所示,模型并行架构:
52.模型并行是将模型拆分成几个分片,由几个训练单元分别持有,共同协作完成训练。
53.实验例:
54.本领域技术人员将该模型双并行架构与传统深度学习并行算法进行比较,传统深度学习并行算法的gpu间数据并行如图12所示,假设系统训练中启用5个gpu,字母a,b,c,d,e分别为每个gpu计算的模型参数,a b c d e为需要交互的参数。
55.当图像批处理大小为64张,人、车、动物图像特征维度为2048,类别数为100万时,对于每个gpu,训练神经网络中其中一层时,如softmax层,需要在gpu间交互的参数量为5x2048x1000000。这个参数量严重影响了模型的学习效率。
56.本领域技术人员采用的模型双并行架构的模型并行处理原理如图13所示,字母a,b,c,d,e分别为每个gpu上处理的图像特征,本领域技术人员利用all-gather算法将图像特征传输至每块gpu上,保证5个gpu上的数据完全一致,每个gpu只计算自己的模型分片,而传输的信息由模型参数变为特征参数,参数量由5x2048x1000000降低到只有5x64x2048。最后5个gpu上的模型分片组合为一个完整的模型。
57.本实用新型技术效果主要体现在以下方面:该系统利用硬件部分和控制模块结合,在作用于水炮车的过程中,使得瞄准系统支架同时控制瞄准器和灯光照明装置配合水炮车进行打击对象的精准识别、精准追踪和精准提取,有效控制水炮车的水炮进行精准打击目标,因此,该系统在威慑射程内具有对目标进行测距、捕捉和瞄准的功能。
58.当然,以上只是本发明的典型实例,除此之外,本发明还可以有其它多种具体实施方式,凡采用等同替换或等效变换形成的技术方案,均落在本发明要求保护的范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。