1.本实用新型涉及光学镜头技术领域,具体而言,涉及一种动态识别镜头。
背景技术:
2.随着科学技术的不断进步以及社会的不断发展,近年来,光学成像镜头也得到了迅猛发展,被广泛应用在智能手机、平板电脑、视频会议、车载监控、安防监控等各个领域,因此,对光学成像镜头的要求也越来越高。
3.动态识别镜头主要用于动态点、特征点识别,应用场景如体感游戏,识别置于人体不同部位的发光点信号,用于实时还原人肢体动作,进行游戏交互。现有的光学动态识别镜头,主要存在以下缺陷:通常靶面偏小,有效像高不超过1英寸,对于一些需要大画幅识别画面的场景,只能通过图像拼接方式实现,技术限制多;基于大画幅低畸变的设计,为了实现对应的技术指标,降低像差提升分辨率,通常通光孔径较小,使用时需要进行补光或后期图像处理;在高温时容易有图像画面失焦的问题。
4.鉴于此,本技术发明人发明了一种动态识别镜头。
技术实现要素:
5.本实用新型的目的在于提供一种像高大、通光大、高低温不失焦、畸变小的动态识别镜头。
6.为实现上述目的,本实用新型采用以下技术方案:一种动态识别镜头,包括从物侧至像侧沿一光轴依次设置的第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜、第七透镜、第八透镜、光阑、第九透镜、第十透镜、第十一透镜、第十二透镜、第十三透镜,所述第一透镜至第十三透镜各自包括一朝向物侧且使成像光线通过的物侧面以及一朝向像侧且使成像光线通过的像侧面;
7.所述第一透镜具正屈光度,且第一透镜的物侧面为凸面,像侧面为凹面;
8.所述第二透镜具负屈光度,且第二透镜的物侧面为凸面,像侧面为凹面;
9.所述第三透镜具负屈光度,且第三透镜的物侧面为凸面,像侧面为凹面;
10.所述第四透镜具负屈光度,且第四透镜的物侧面为凹面,像侧面为凹面;
11.所述第五透镜具正屈光度,且第五透镜的物侧面为凸面,像侧面为凸面;
12.所述第六透镜具正屈光度,且第六透镜的物侧面为平面,像侧面为凸面;
13.所述第七透镜具正屈光度,且第七透镜的物侧面为凸面,像侧面为凸面;
14.所述第八透镜具负屈光度,且第八透镜的物侧面为凹面,像侧面为凹面;
15.所述第九透镜具正屈光度,且第九透镜的物侧面为凸面,像侧面为凸面;
16.所述第十透镜具正屈光度,且第十透镜的物侧面为凸面,像侧面为凸面;
17.所述第十一透镜具负屈光度,且第十一透镜的物侧面为凹面,像侧面为凹面;
18.所述第十二透镜具正屈光度,且第十二透镜的物侧面为凸面,像侧面为凸面;
19.所述第十三透镜具正屈光度,且第十三透镜的物侧面为凸面,像侧面为凸面;
20.该镜头满足:-1.05《f前/f后《-1.02,其中,f前为第一透镜、第二透镜、第三透镜的组合焦距,f后为第四透镜、第五透镜、第六透镜、第七透镜、第八透镜的组合焦距。
21.进一步地,所述第一透镜、第二透镜、第三透镜均为弯月透镜。
22.进一步地,所述第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜、第七透镜、第八透镜、第九透镜、第十透镜、第十一透镜、第十二透镜、第十三透镜均为玻璃球面透镜。
23.进一步地,所述第九透镜及第十透镜的折射率温度系数均为负数。
24.进一步地,所述第四透镜的像侧面与第五透镜的物侧面相互胶合,所述第七透镜的像侧面与第八透镜的物侧面相互胶合,所述第十透镜的像侧面与第十一透镜的物侧面相互胶合。
25.进一步地,所述第四透镜与第五透镜的组合焦距f45满足:-66mm《f45《-64mm,所述第七透镜与第八透镜的组合焦距f78满足:80mm《f78《81mm,第十透镜与第十一透镜的组合焦距f1011满足:-27mm《f1011《-26mm。
26.进一步地,该镜头的像高为28.2mm。
27.进一步地,该镜头的焦距为24mm。
28.进一步地,该镜头的最大通光f/no=2.5。
29.采用上述技术方案后,本实用新型与现有技术相比,具有如下优点:
30.本实用新型动态识别镜头采用十三片全玻设计,其像高达28.2mm,同时通光大,镜头进光量足;无热化设计,高低温画面不失焦,畸变小,同时实现红外共焦。
附图说明
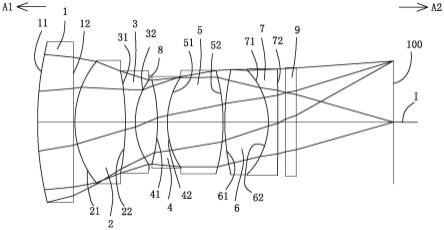
31.图1为本实用新型实施例1的光路图;
32.图2为本实用新型实施例1中镜头在可见光下的mtf曲线图;
33.图3为本实用新型实施例1中镜头在光波长850nm下的mtf曲线图;
34.图4为本实用新型实施例1中镜头在可见光下的垂轴色差曲线图;
35.图5为本实用新型实施例1中镜头在可见光下的场曲&畸变曲线图;
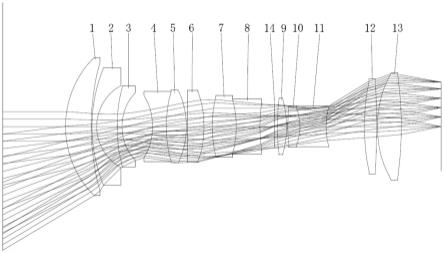
36.图6为本实用新型实施例2的光路图;
37.图7为本实用新型实施例2中镜头在可见光下的mtf曲线图;
38.图8为本实用新型实施例2中镜头在光波长850nm下的mtf曲线图;
39.图9为本实用新型实施例2中镜头在可见光下的垂轴色差曲线图;
40.图10为本实用新型实施例2中镜头在可见光下的场曲&畸变曲线图;
41.图11为本实用新型实施例3的光路图;
42.图12为本实用新型实施例3中镜头在可见光下的mtf曲线图;
43.图13为本实用新型实施例3中镜头在光波长850nm下的mtf曲线图;
44.图14为本实用新型实施例3中镜头在可见光下的垂轴色差曲线图;
45.图15为本实用新型实施例3中镜头在可见光下的场曲&畸变曲线图;
46.附图标记说明:
47.1、第一透镜;2、第二透镜;3、第三透镜;4、第四透镜;5、第五透镜;6、第六透镜;7、第七透镜;8、第八透镜;9、第九透镜;10、第十透镜;11、第十一透镜;12、第十二透镜;13、第
十三透镜;14、光阑。
具体实施方式
48.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
49.这里所说的「一透镜具有正屈光率(或负屈光率)」,是指所述透镜以高斯光学理论计算出来的近轴屈光率为正(或为负)。所说的「透镜的物侧面(或像侧面)」定义为成像光线通过透镜表面的特定范围。透镜的面形凹凸判断可依该领域中通常知识者的判断方式,即通过曲率半径(简写为r值)的正负号来判断透镜面形的凹凸。r值可常见被使用于光学设计软件中,例如zemax或codev。r值亦常见于光学设计软件的透镜资料表(lens data sheet)中。以物侧面来说,当r值为正时,判定为物侧面为凸面;当r值为负时,判定物侧面为凹面。反之,以像侧面来说,当r值为正时,判定像侧面为凹面;当r值为负时,判定像侧面为凸面。
50.本实用新型公开了一种动态识别镜头,包括从物侧至像侧沿一光轴依次设置的第一透镜1、第二透镜2、第三透镜3、第四透镜4、第五透镜5、第六透镜6、第七透镜7、第八透镜8、光阑14、第九透镜9、第十透镜10、第十一透镜11、第十二透镜12、第十三透镜13,所述第一透镜1至第十三透镜13各自包括一朝向物侧且使成像光线通过的物侧面以及一朝向像侧且使成像光线通过的像侧面;
51.所述第一透镜1具正屈光度,且第一透镜1的物侧面为凸面,像侧面为凹面;
52.所述第二透镜2具负屈光度,且第二透镜2的物侧面为凸面,像侧面为凹面;
53.所述第三透镜3具负屈光度,且第三透镜3的物侧面为凸面,像侧面为凹面;
54.所述第四透镜4具负屈光度,且第四透镜4的物侧面为凹面,像侧面为凹面;
55.所述第五透镜5具正屈光度,且第五透镜5的物侧面为凸面,像侧面为凸面;
56.所述第六透镜6具正屈光度,且第六透镜6的物侧面为平面,像侧面为凸面;
57.所述第七透镜7具正屈光度,且第七透镜7的物侧面为凸面,像侧面为凸面;
58.所述第八透镜8具负屈光度,且第八透镜8的物侧面为凹面,像侧面为凹面;
59.所述第九透镜9具正屈光度,且第九透镜9的物侧面为凸面,像侧面为凸面;
60.所述第十透镜10具正屈光度,且第十透镜10的物侧面为凸面,像侧面为凸面;
61.所述第十一透镜11具负屈光度,且第十一透镜11的物侧面为凹面,像侧面为凹面;
62.所述第十二透镜12具正屈光度,且第十二透镜12的物侧面为凸面,像侧面为凸面;
63.所述第十三透镜13具正屈光度,且第十三透镜13的物侧面为凸面,像侧面为凸面。
64.该镜头中,所述第一透镜1、第二透镜2、第三透镜3、第四透镜4、第五透镜5、第六透镜6、第七透镜7、第八透镜8、第九透镜9、第十透镜10、第十一透镜11、第十二透镜12、第十三透镜13均为玻璃球面透镜,同时合理搭配各透镜的光焦度等参数,实现了焦距为24mm焦距、最大通光f/no=2.5、像高为28.2mm的大靶面光学成像镜头,其主要可用于动态识别、运动场景识别重建、3d游戏等领域。
65.该镜头中,为了降低整体光学镜片的口径,第十二透镜12、十三透镜均为正光焦度透镜,如此可放大光线,减小前段光学镜片的口径。
66.该镜头前组(光阑14前所有透镜,即包括第一至第八透镜8)采用反远距结构。其
中,反远距结构由前负透镜组和后正透镜组组成。该镜头中,第一、二、三透镜构成反远距结构具负光焦度的前端,第四、五、六、七、八透镜构成反远距结构具正光焦度的后端,并满足:-1.05《f前/f后《-1.02,f前为第一透镜1、第二透镜2、第三透镜3的组合焦距,f后为第四透镜4、第五透镜5、第六透镜6、第七透镜7、第八透镜8的组合焦距。且当满足以上关系时,镜头前组能有效的消除轴外高级慧差及像差,提升整体镜头的光学分辨率。
67.所述第一透镜1、第二透镜2、第三透镜3均为弯月透镜(弯月透镜是由两个曲率半径较小,数值相差也很少的球面构成),且该三片弯月透镜具有不同的正负光焦度(第一透镜1为正,第二透镜2及第三透镜3均为负),此设计用于镜头前端可压缩光线口径,同时矫正轴外宽光束的场曲及慧差。
68.所述第九透镜9及第十透镜10的折射率温度系数均为负数。即第九透镜9及第十透镜10均由负折射率温度系数的玻璃制成,如此使得镜头在-20℃至60℃温度环境中使用时,画面清晰不失焦。
69.所述第四透镜4的像侧面与第五透镜5的物侧面相互胶合,所述第七透镜7的像侧面与第八透镜8的物侧面相互胶合,所述第十透镜10的像侧面与第十一透镜11的物侧面相互胶合。合理设置胶合透镜,可有效减少系统色差。其中,所述第四透镜4与第五透镜5的组合焦距f45满足:-66mm《f45《-64mm,所述第七透镜7与第八透镜8的组合焦距f78满足:80mm《f78《81mm,第十透镜10与第十一透镜11的组合焦距f1011满足:-27mm《f1011《-26mm。
70.该镜头经过合理的光学设计,在可见光与红外850nm波段均具有良好的成像质量,其mtf在100lp/mm时均大于0.35。
71.该镜头采用十三片全玻球面设计,设计有效画幅达28.2mm,能够匹配市面上大多数图像识别sensor的画幅;采用f2.5通光设计,使用时镜头进光量足;采用无热化设计,实现了从-20℃-60℃的无热化设计,在上述温度范围内使用时不会因为温度变化造成画面失焦;该镜头的光学畸变值在-1.8%以内,全画面成像画面形变较小,极大的提升了后期算法识别的准确度;采用可见光&850nm共焦设计,离焦量小于10um,能够等后焦切换可见和红外使用。
72.下面将以具体实施例对本实用新型的动态识别镜头进行详细说明。
73.实施例1
74.参照图1所示,本实用新型公开了一种动态识别镜头,包括从物侧至像侧沿一光轴依次设置的第一透镜1、第二透镜2、第三透镜3、第四透镜4、第五透镜5、第六透镜6、第七透镜7、第八透镜8、光阑14、第九透镜9、第十透镜10、第十一透镜11、第十二透镜12、第十三透镜13,所述第一透镜1至第十三透镜13各自包括一朝向物侧且使成像光线通过的物侧面以及一朝向像侧且使成像光线通过的像侧面;
75.所述第一透镜1具正屈光度,且第一透镜1的物侧面为凸面,像侧面为凹面;
76.所述第二透镜2具负屈光度,且第二透镜2的物侧面为凸面,像侧面为凹面;
77.所述第三透镜3具负屈光度,且第三透镜3的物侧面为凸面,像侧面为凹面;
78.所述第四透镜4具负屈光度,且第四透镜4的物侧面为凹面,像侧面为凹面;
79.所述第五透镜5具正屈光度,且第五透镜5的物侧面为凸面,像侧面为凸面;
80.所述第六透镜6具正屈光度,且第六透镜6的物侧面为平面,像侧面为凸面;
81.所述第七透镜7具正屈光度,且第七透镜7的物侧面为凸面,像侧面为凸面;
82.所述第八透镜8具负屈光度,且第八透镜8的物侧面为凹面,像侧面为凹面;
83.所述第九透镜9具正屈光度,且第九透镜9的物侧面为凸面,像侧面为凸面;
84.所述第十透镜10具正屈光度,且第十透镜10的物侧面为凸面,像侧面为凸面;
85.所述第十一透镜11具负屈光度,且第十一透镜11的物侧面为凹面,像侧面为凹面;
86.所述第十二透镜12具正屈光度,且第十二透镜12的物侧面为凸面,像侧面为凸面;
87.所述第十三透镜13具正屈光度,且第十三透镜13的物侧面为凸面,像侧面为凸面。
88.本具体实施例的详细光学数据如表1-1所示。
89.表1-1实施例1的详细光学数据
90.表面 口径大小(直径)曲率半径厚度折射率色散系数焦距0被摄物面 infinityinfinity
ꢀꢀꢀ
1第一透镜44.031.078.181.8839.254.702 41.175.490.20
ꢀꢀꢀ
3第二透镜37.348.641.551.6460.2-34.234 26.314.966.57
ꢀꢀꢀ
5第三透镜25.851.701.551.5264.2-45.616 21.716.069.85
ꢀꢀꢀ
7第四透镜20.0-19.384.331.9220.9-13.56 8第五透镜22.440.386.481.7640.121.879 23.2-26.670.21
ꢀꢀꢀ
10第六透镜23.0infinity5.431.6146.254.9711 22.8-33.602.51
ꢀꢀꢀ
12第七透镜19.640.587.831.9517.919.01 13第八透镜17.6-29.957.371.8523.8-20.6714 14.748.004.81
ꢀꢀꢀ
15光阑13.7infinity0.80
ꢀꢀꢀ
16第九透镜18.073.763.091.5968.637.0917 18.0-30.990.18
ꢀꢀꢀ
18第十透镜13.260.724.071.5968.622.18 19第十一透镜12.4-16.438.211.8125.5-10.8620 13.023.3312.21
ꢀꢀꢀ
21第十二透镜29.369.203.971.5749.499.7722 30.3-320.150.28
ꢀꢀꢀ
23第十三透镜34.235.587.661.7444.937.7424 33.9-124.1012.68
ꢀꢀꢀ
25成像面28.2infinity
ꢀꢀꢀꢀ
91.本实施例中,第一透镜、第二透镜、第三透镜的组合焦距f前=-38.28mm,第四透镜、第五透镜、第六透镜、第七透镜、第八透镜的组合焦距f后=36.78mm。
92.本实施例中,所述第四透镜的像侧面与第五透镜的物侧面相互胶合,所述第七透镜的像侧面与第八透镜的物侧面相互胶合,所述第十透镜的像侧面与第十一透镜的物侧面相互胶合。其中,第四透镜与第五透镜的组合焦距f45=-65.28mm,第七透镜与第八透镜的
组合焦距f78=80.02mm,第十透镜与第十一透镜的组合焦距f1011=-26.61mm。
93.本实施例中,镜头在可见光及光波长840nm下的mtf曲线图请参阅图2、图3,从图中可以看出,该款镜头的空间频率达100lp/mm时,mtf值均大于0.35,成像质量优良,镜头的分辨率高。
94.镜头在可见光下的垂轴色差曲线图请参阅图4,从图中可以看出,倍率色差均小于7um,色差小,具有较高的图像色彩还原性。
95.镜头在可见光下的场曲及畸变图请参阅图5,从图中可以看出,系统的光学畸变《|-1.8%|,畸变小,全画面成像画面形变较小,极大的提升了后期算法识别的准确度。
96.实施例2
97.如图6所示,本实施例与实施例1相比,主要在于各透镜表面的曲率半径、透镜厚度等光学参数有所不同。
98.本具体实施例的详细光学数据如表2-1所示。
99.表2-1实施例2的详细光学数据
[0100][0101][0102]
本实施例中,第一透镜、第二透镜、第三透镜的组合焦距f前=-38.48mm,第四透镜、第五透镜、第六透镜、第七透镜、第八透镜的组合焦距f后=36.66mm。
[0103]
本实施例中,所述第四透镜的像侧面与第五透镜的物侧面相互胶合,所述第七透镜的像侧面与第八透镜的物侧面相互胶合,所述第十透镜的像侧面与第十一透镜的物侧面相互胶合。其中,第四透镜与第五透镜的组合焦距f45=-65.38mm,第七透镜与第八透镜的
组合焦距f78=80.17mm,第十透镜与第十一透镜的组合焦距f1011=-26.64mm。
[0104]
本实施例中,镜头在可见光及光波长840nm下的mtf曲线图请参阅图7、图8,从图中可以看出,该款镜头的空间频率达100lp/mm时,mtf值均大于0.35,成像质量优良,镜头的分辨率高。
[0105]
镜头在可见光下的垂轴色差曲线图请参阅图9,从图中可以看出,倍率色差均小于7um,色差小,具有较高的图像色彩还原性。
[0106]
镜头在可见光下的场曲及畸变图请参阅图10,从图中可以看出,系统的光学畸变《|-1.8%|,畸变小,全画面成像画面形变较小,极大的提升了后期算法识别的准确度。
[0107]
实施例3
[0108]
如图11所示,本实施例与实施例1相比,主要在于各透镜表面的曲率半径、透镜厚度等光学参数有所不同。
[0109]
本具体实施例的详细光学数据如表3-1所示。
[0110]
表3-1实施例3的详细光学数据
[0111][0112][0113]
本实施例中,第一透镜、第二透镜、第三透镜的组合焦距f前=-38.11mm,第四透镜、第五透镜、第六透镜、第七透镜、第八透镜的组合焦距f后=37.21mm。
[0114]
本实施例中,所述第四透镜的像侧面与第五透镜的物侧面相互胶合,所述第七透镜的像侧面与第八透镜的物侧面相互胶合,所述第十透镜的像侧面与第十一透镜的物侧面相互胶合。其中,第四透镜与第五透镜的组合焦距f45=-64.75mm,第七透镜与第八透镜的
组合焦距f78=80.53mm,第十透镜与第十一透镜的组合焦距f1011=-26.77mm。
[0115]
本实施例中,镜头在可见光及光波长840nm下的mtf曲线图请参阅图12、图13,从图中可以看出,该款镜头的空间频率达100lp/mm时,mtf值均大于0.35,成像质量优良,镜头的分辨率高。
[0116]
镜头在可见光下的垂轴色差曲线图请参阅图14,从图中可以看出,倍率色差均小于7um,色差小,具有较高的图像色彩还原性。
[0117]
镜头在可见光下的场曲及畸变图请参阅图15,从图中可以看出,系统的光学畸变《|-1.8%|,畸变小,全画面成像画面形变较小,极大的提升了后期算法识别的准确度。
[0118]
以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。