1.本发明属于光学装调技术领域,更具体地,涉及一种利用计算全息元件对rug型离轴三反光学系统进行共基准装调的方法及装置。
背景技术:
2.离轴三反光学系统具有无中心遮挡、视场大、成像质量高等优点。但由于装调自由度共18个,装调自由度多,且各自由度引起的失调相互耦合,导致离轴三反光学系统各反射镜的精确位置难以确定,装调难度大,装调精度不高。rug型离轴三反光学系统具有一次像点,主三镜的曲率半径差距较大,因此传统rug型离轴三反光学系统装调方法采用传统补偿器或者激光跟踪仪进行各反射镜的基准传递,装调方法复杂,且由于基准传递精度不高导致装调精度低。
技术实现要素:
3.针对现有技术的以上缺陷或改进需求,本发明提出了一种基于计算全息的rug型离轴三反光学系统共基准装调方法及装置,解决现有rug型离轴三反光学系统装调过于复杂且精度不高的技术问题。
4.为实现上述目的,按照本发明的一个方面,提供了一种基于计算全息的离轴三反光学系统共基准装调装置,包括:计算全息元件、干涉仪、过渡平面镜、准直平面镜及经纬仪;
5.所述计算全息元件设计有主镜检测衍射区、三镜检测衍射区、主镜标记点衍射区、三镜标记点衍射区、干涉仪对准衍射区以及光轴衍射区;
6.干涉仪发出的测量光束经过干涉仪对准衍射区返回干涉仪,当干涉仪形成零条纹后,干涉仪以及计算全息元件完成对准,则不再调整;
7.干涉仪发出的测量光束经过主镜检测衍射区及主镜后返回干涉仪,调整主镜,使检测得到的主镜波像差满足要求且干涉仪上形成零条纹,此时主镜完成装调;
8.干涉仪发出的测量光束经过三镜检测衍射区及三镜后返回干涉仪,调整三镜,使检测得到的三镜波像差满足要求且干涉仪上形成零条纹,此时三镜完成装调;
9.干涉仪发出的测量光束经过光轴衍射区及过渡平面镜返回干涉仪,调整过渡平面镜使干涉仪上形成零条纹,将主镜和三镜的光轴引出到过渡平面镜;
10.撤去计算全息元件,将干涉仪、次镜及准直平面镜初步放置,使干涉仪发出的测量光束经过主镜、次镜、三镜及准直平面镜后无切光,使用经纬仪调整准直平面镜与过渡平面镜光轴一致,调整干涉仪角度使干涉仪发出的测量光束经过过渡平面镜返回后形成零条纹,此时干涉仪发出的测量光束为离轴三反光学系统的轴上光;通过干涉仪检测到的离轴三反光学系统波像差对次镜的位置进行调整,直至离轴三反光学系统的波像差满足技术要求,此时离轴三反光学系统所有反射镜完成装调。
11.在一些可选的实施方案中,所述装置还包括:六维调整台、气浮台及二维调整台;
12.主镜、次镜、三镜及干涉仪的调整均通过六维调整台实现,计算全息元件、过渡平面镜及准直平面镜均放置于二维调整台实现调整,六维调整台和二维调整台均放置于气浮台。
13.在一些可选的实施方案中,所述主镜检测衍射区能够对从干涉仪发出并照射到其上的测量光束发生衍射,生成用于入射到主镜的衍射光;所述三镜检测衍射区能够对从干涉仪发出并照射到其上的测量光束发生衍射,生成用于入射到三镜的衍射光;所述干涉仪对准衍射区能够将干涉仪发出的测量光束反射回干涉仪,实现干涉仪与计算全息元件的对准;所述主镜标记点衍射区能够对干涉仪发出的测量光束发生衍射,生成主镜边缘三个特定位置的汇聚点,实现对主镜空间位置的初定位;所述三镜标记点衍射区能够对干涉仪发出的测量光束发生衍射,生成三镜边缘三个特定位置的汇聚点,实现对三镜空间位置的初定位;所述光轴衍射区能够对干涉仪发出的测量光束发生衍射,生成一束与主三镜光轴一致的平行光束,该平行光束若原路返回到干涉仪,能够在干涉仪上形成零条纹,其中,主镜检测衍射区、三镜检测衍射区、主镜标记点衍射区、三镜标记点衍射区、干涉仪对准衍射区以及光轴衍射区均设置在同一块基板上。
14.在一些可选的实施方案中,所述离轴三反光学系统中的主镜、次镜及三镜光轴一致,且主镜和次镜具有一次像点,出入射均为平面波,且出入射光轴均与主三镜光轴一致。
15.在一些可选的实施方案中,所述干涉仪能够通过测量光束经过主镜检测衍射区与主镜后返回到干涉仪上得到的干涉条纹测量光路的波像差,能够通过测量光束经过三镜检测衍射区与三镜后返回到干涉仪上得到的干涉条纹测量光路的波像差,能够通过测量光束经过离轴三反光学系统与准直平面镜返回到干涉仪上得到的干涉条纹测量光路的波像差,且能够发出平面测量光波。
16.按照本发明的另一个方面,提供了一种基于计算全息的离轴三反光学系统共基准装调方法,包括:
17.提供计算全息元件用于rug型离轴三反光学系统主镜及三镜的定位,所述计算全息元件设计有主三镜检测衍射区、主三镜标记点衍射区、干涉仪对准衍射区以及光轴衍射区;
18.提供干涉仪,利用干涉仪对准衍射区对准计算全息元件,干涉仪发出的测量光束经过干涉仪对准衍射区返回干涉仪,当干涉仪形成零条纹后,干涉仪以及计算全息元件完成对准、不再调整;通过主镜标记点衍射区初步标定主镜外边缘,干涉仪发出的测量光束经过主镜检测衍射区及主镜后返回干涉仪,调整主镜,使检测得到的主镜波像差满足要求且干涉仪上形成零条纹,此时主镜完成装调;
19.通过三镜标记点衍射区初步标定三镜外边缘,干涉仪发出的测量光束经过三镜检测衍射区及三镜后返回干涉仪,调整三镜,使检测得到的三镜波像差满足要求且干涉仪上形成零条纹,此时三镜完成装调;
20.提供过渡平面镜,干涉仪发出的测量光束经过光轴衍射区及过渡平面镜返回干涉仪,调整过渡平面镜使干涉仪上形成零条纹,将主三镜的光轴引出到过渡平面镜;
21.撤去计算全息元件,提供准直平面镜,将干涉仪、次镜及准直平面镜初步放置,使干涉仪发出的测量光束经过主镜、次镜、三镜及准直平面镜后无切光,使用经纬仪调整准直平面镜与过渡平面镜光轴一致,调整干涉仪角度使其发出的测量光束经过过渡平面镜返回
后形成零条纹,此时干涉仪发出的测量光束为离轴三反光学系统的轴上光;通过干涉仪检测到的离轴三反光学系统波像差对次镜的位置进行调整,直至离轴三反光学系统的波像差满足技术要求,此时离轴三反光学系统所有反射镜完成装调。
22.在一些可选的实施方案中,主镜、次镜、三镜及干涉仪的调整均通过六维调整台实现,计算全息元件、过渡平面镜及准直平面镜均放置于二维调整台实现调整,所有调整台均放置于气浮台。
23.在一些可选的实施方案中,主镜检测衍射区能够对从干涉仪发出并照射到其上的测量光束发生衍射,生成用于入射到主镜的衍射光;三镜检测衍射区能够对从干涉仪发出并照射到其上的测量光束发生衍射,生成用于入射到三镜的衍射光;干涉仪对准衍射区可以将干涉仪发出的测量光束反射回干涉仪,实现干涉仪与计算全息元件的对准;主镜标记点衍射区能够对干涉仪发出的测量光束发生衍射,生成主镜边缘三个特定位置的汇聚点,实现对主镜空间位置的初定位;三镜标记点衍射区能够对干涉仪发出的测量光束发生衍射,生成三镜边缘三个特定位置的汇聚点,实现对三镜空间位置的初定位;光轴衍射区能够对干涉仪发出的测量光束发生衍射,生成一束与主三镜光轴一致的平行光束,该平行光束若原路返回到干涉仪,能够在干涉仪上形成零条纹,其中,主镜检测衍射区、三镜检测衍射区、主镜标记点衍射区、三镜标记点衍射区、干涉仪对准衍射区以及光轴衍射区均设置在同一块基板上。
24.在一些可选的实施方案中,所述rug型离轴三反光学系统中的主镜、次镜及三镜光轴一致,且主次镜具有一次像点,出入射均为平面波,且出入射光轴均与主三镜光轴一致。
25.在一些可选的实施方案中,所述干涉仪能够通过测量光束经过主镜检测衍射区与主镜后返回到干涉仪上得到的干涉条纹测量该光路的波像差,能够通过测量光束经过三镜检测衍射区与三镜后返回到干涉仪上得到的干涉条纹测量该光路的波像差,能够通过测量光束经过离轴三反光学系统与准直平面镜返回到干涉仪上得到的干涉条纹测量该光路的波像差,且能够发出平面测量光波。
26.总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
27.本装调方法利用计算全息及干涉仪实现离轴三反光学系统的主三镜共基准装调,无需利用激光跟踪仪等其他仪器,在计算全息指导下即可完成主镜及三镜的相对位置准确调整,再利用计算全息找到离轴三反光学系统的轴上视场,在轴上视场下完成次镜的装调。该方法降低了装调自由度,且可对各自由度失调解耦合,装调精度高。
附图说明
28.图1是本发明实施例提供的一种计算全息元件衍射区域示意图;
29.图2是本发明实施例提供的一种装调方法搭建的主三镜装调光路示意图;
30.图3是本发明实施例提供的一种装调方法搭建的次镜装调光路示意图;
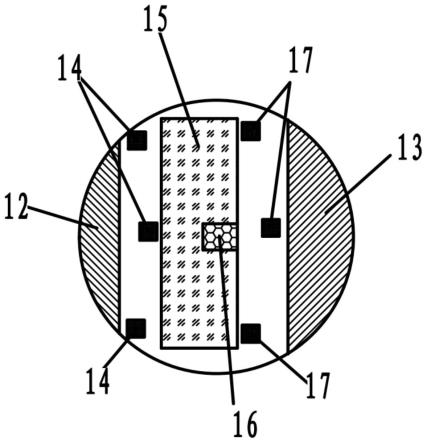
31.图中:1-主镜,2-三镜,3-计算全息元件,4-干涉仪,5-次镜,6-准直平面镜,7-六维调整台,8-气浮台,9-二维调整台,10-过渡平面镜,11-经纬仪,12-主镜检测衍射区,13-三镜检测衍射区,14-主镜标记点衍射区,15-干涉仪对准衍射区,16-光轴衍射区,17-三镜标记点衍射区。
具体实施方式
32.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
33.计算全息元件能准确地生成多个几乎任意形状的波前,且多个波前之间具有精确的相对位置关系,这种准确性和设计上的灵活性赋予了计算全息元件在指导光学元件调整方面的强大能力。本发明利用计算全息以干涉检测方法逐个实现光学元件的精确调整,进行各装调自由度的解耦合,各个光学元件之间的准确相对位置关系依赖于计算全息生成多个相对位置精确波前的能力,从而将主三镜的基准传递精度转化为计算全息元件的加工精度,大大提高了装调效率及装调精度。
34.下面结合附图给出使用本发明的方法搭建的离轴三反光学系统装调装置的具体实施例:
35.如图1所示,提供计算全息元件3用于rug型离轴三反光学系统主镜1及三镜2的定位,计算全息元件3设计有主镜检测衍射区12、三镜检测衍射区13、主镜标记点衍射区14、三镜标记点衍射区17、干涉仪对准衍射区15以及光轴衍射区16;
36.主镜检测衍射区12能够对从干涉仪4发出并照射到其上的测量光束发生衍射,生成用于入射到主镜1的衍射光;其包含的三镜检测衍射区13能够对从干涉仪4发出并照射到其上的测量光束发生衍射,生成用于入射到三镜2的衍射光;其包含的干涉仪对准衍射区15可以将干涉仪4发出的测量光束反射回干涉仪4,实现干涉仪4与计算全息元件3的对准;其包含的主镜标记点衍射区14能够对干涉仪4发出的测量光束发生衍射,生成主镜1边缘三个特定位置的汇聚点,实现对主镜1空间位置的初定位;其包含的三镜标记点衍射区17能够对干涉仪4发出的测量光束发生衍射,生成三镜2边缘三个特定位置的汇聚点,实现对三镜2空间位置的初定位;其包含的光轴衍射区16能够对干涉仪4发出的测量光束发生衍射,生成一束与主三镜光轴一致的平行光束,该光束若原路返回到干涉仪4,可在干涉仪4上形成零条纹。
37.计算全息元件3同时拥有主镜检测衍射区12及三镜检测衍射区13,按照理论设计可同时检测主镜1及三镜2。由于主镜检测衍射区12及三镜检测衍射区13相对位置固定,那么干涉仪4经过计算全息元件3出射的主镜1及三镜2光波相对位置也固定。只要将主镜1与三镜2调整好位置,使光波经过主镜1及三镜2返回干涉仪4后产生的干涉条纹波像差最小,那么主镜1与三镜2的相对位置也得到了确定。再使用计算全息元件3上设置光轴衍射区16确定离轴三反光学系统的轴上光,在轴上视场即可完成次镜5的装调,从而完成整个离轴三反光学系统的装调。
38.具体地,一种基于计算全息的rug型离轴三反光学系统共基准装调方法,包括以下步骤:
39.步骤一:搭建图2所示光路,以干涉仪4为基准,调整计算全息元件3,利用干涉仪对准衍射区15对准计算全息元件3,然后利用主镜检测衍射区12确定主镜1位置。具体方式为:将干涉仪4放置于六维调整台7,将计算全息元件3放置于二维调整台9,所有调整台放置于气浮台8。由于干涉检测对环境稳定性要求高,气浮台8可以减弱微振动对干涉检测精度的
影响。然后干涉仪4发出的测量光束经过干涉仪对准衍射区15返回干涉仪,当干涉仪4形成零条纹后,干涉仪4以及计算全息元件3完成对准、不再调整。主镜1放置于六维调整台7,通过主镜标记点衍射区14初步标定主镜1外边缘,干涉仪4发出的测量光束经过主镜检测衍射区12及主镜1后返回干涉仪4形成干涉条纹,使用六维调整台7调整主镜1,使检测得到的主镜1波像差满足要求且干涉仪4上形成零条纹,此时主镜1完成装调。
40.步骤二:按图2光路,利用三镜检测衍射区13确定三镜2位置。具体方式为:将三镜2放置于六维调整台7,通过三镜标记点衍射区17初步标定三镜2外边缘,干涉仪4发出的测量光束经过三镜检测衍射区13及三镜2后返回干涉仪4形成干涉条纹,使用六维调整台7调整三镜2,使检测得到的三镜2波像差满足要求且干涉仪4上形成零条纹,此时三镜2完成装调;
41.步骤三:将主镜1及三镜2的光轴基准通过光轴衍射区16引出到过渡平面镜10,具体方式为:过渡平面镜放置于二维调整台9,干涉仪4发出的测量光束经过光轴衍射区16及过渡平面镜10返回干涉仪4,调整过渡平面镜10使干涉仪4上形成零条纹,由此将主镜和三镜的光轴引出到过渡平面镜10;
42.步骤四:按照图3光路,撤去计算全息元件3,将干涉仪4及准直平面镜6的光轴调整至与主镜和三镜光轴一致,然后在轴上视场装调次镜5,使整个离轴三反光学系统波像差满足技术要求。具体方式为:次镜5放置于六维调整台7,准直平面镜6放置于二维调整台9,将干涉仪4、次镜5及准直平面镜6初步放置,使干涉仪4发出的测量光束经过主镜、次镜、三镜及准直平面镜6后无切光,使用经纬仪11调整准直平面镜6与过渡平面镜10光轴一致,调整干涉仪4角度使其发出的测量光束经过过渡平面镜10返回后形成零条纹,此时干涉仪4发出的测量光束为离轴三反光学系统的轴上光。干涉仪4发出的测量光束经过离轴三反光学系统以及准直平面镜6返回到干涉仪形成干涉条纹,通过干涉仪4检测到离轴三反光学系统波像差。根据干涉仪4检测得到的波像差对次镜5的位置进行调整,直至离轴三反光学系统的波像差满足技术要求,此时离轴三反光学系统所有反射镜完成装调。
43.本装调方法克服现有的技术问题,利用计算全息元件3及干涉仪4对rug型离轴三反光学系统进行共基准装调,无需利用激光跟踪仪等其他仪器即高精度的实现了主三镜的精确调整。本发明将主三镜的基准传递精度转化为计算全息元件的加工精度,主三镜之间的准确相对位置关系依赖于计算全息生成多个相对位置精确波前的能力,既实现了各装调自由度的解耦合,又大大提高了装调精度。利用计算全息元件3,还能找到离轴三反光学系统的轴上视场,从而在轴上视场下完成次镜5的装调,不需再转换到轴外视场,从而提高了装调效率。
44.此干涉仪4发出的平面光波口径为150mm,主镜1有效口径为144mm,次镜5有效口径为37.5mm,三镜2有效口径为88.8mm。
45.需要指出,根据实施的需要,可将本技术中描述的各个步骤/部件拆分为更多步骤/部件,也可将两个或多个步骤/部件或者步骤/部件的部分操作组合成新的步骤/部件,以实现本发明的目的。
46.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。