1.本发明属于道路交通工程土石混填路基智能填筑施工技术领域,尤其涉及一种混合现实技术辅助的路基三维智能填筑施工控制方法。
背景技术:
2.高填方成为主要的建筑设施实现形式;同时,由于填筑量大,为节约成本且充分利用挖方弃料,常采用土石混合料作为高填方填料。但是,土石混合料性质复杂,高填方填筑高度大,自重大,如若处治不当工后沉降大等因素都影响着高填方工程的长期运营稳定。其中,填筑阶段,现行方法采用分块倒料摊铺,无法精确按照设计层厚进行填筑,少填耽误工期,超填又容易造成层厚过大,不易压实等特点;压实阶段,目前主要采用经验或随机位置抽查压实度等方法判断当前填筑压实层的路基是否达到预设密实度。误差较大,容易漏判潜在不密实路段;固结阶段,现行方法主要也是采用对少数关键点进行沉降观测进而保证路基变形可控,缺少大范围快捷便利的沉降控制方法。
技术实现要素:
3.为解决上述技术问题,本发明提出了一种混合现实技术辅助的路基三维智能填筑施工控制方法,本发明基于混合现实技术辅助,在路基填筑,压实、固结观测阶段提供一种智能化的施工控制方法。在路基填筑阶段,结合卫星定位和快速扫描技术,将填筑路基的断面特征实时生成虚拟图像,并和预设填筑断面比对,即可便捷的判断填筑方量是否满足设计要求;在路基压实阶段,利用电磁波扫描装置和卷积神经网络的图像特征提取技术,实时生成填筑体内部的特征扫描图,并提取出孔隙对应的像素块信息,进而通过计算填筑体的孔隙度快速估算填筑体的压实度;在路基沉降观测阶段,基于有限元软件的二次开发平台,合理简化填筑路段的断面形式,即可做到在压实完成后快速生成有限元计算模型,计算不同工况下的路基变形情况,提取关键沉降数据和设计标准进行比对,进一步保障土石混填路基的长期稳定运营。本发明可以为土石混填道路工程智能施工提供新的思路,对土石混填工程沉降控制提供一定的参考。
4.为实现上述目的,本发明提供了一种混合现实技术辅助的路基三维智能填筑施工控制方法,包括:
5.将填筑路段的三维地质模型和路基实体模型进行耦合,获取mr三维实景模型;
6.获取填筑机械的实时三维定位信息和填筑体表面的控制点相对点云坐标,将所述实时三维定位信息和所述控制点相对点云坐标进行耦合,获取填筑面绝对三维坐标,将所述填筑面绝对三维坐标与所述mr三维实景模型进行关联,基于关联结果对路基进行填筑;
7.所述路基填筑完成后,基于电磁波探测获取填筑路基的扫描特征图,基于所述扫描特征图获取所述填筑路基压实度;
8.对所述路基实体模型进行半结构分析,获得填筑路基的简化计算模型,将填筑路基变量参数输入至所述简化计算模型,获取填筑路基变形数据;
9.基于所述填筑路基压实度和所述填筑路基变形数据,判断路基变形控制指标是否满足设计要求,若不满足,则重新获取所述填筑路基压实度,直至路基变形控制指标满足设计要求。
10.可选地,将填筑路段的三维地质模型和路基实体模型进行耦合包括:
11.基于设计路基的断面特征构建所述三维地质模型,基于高程信息构建路基实体模型,将所述三维地质模型和所述路基实体模型进行耦合,并将整体关联至相应的大地坐标系。
12.可选地,获取填筑机械的实时三维定位信息和填筑体表面的控制点相对点云坐标包括:
13.在填筑机械上配备gps接收天线和三维激光扫描设备,在填筑过程中,定位卫星向gps接收天线实时发送所述填筑机械的三维空间坐标信息,结合基站发送的差分信号综合生成所述填筑机械的所述实时三维定位信息,通过所述三维激光扫描设备获取填筑体表面的所述控制点相对点云坐标。
14.可选地,基于电磁波探测获取路基的扫描特征图包括:
15.在对所述填筑路基进行碾压夯实的过程中,通过电磁波发射装置不断向填筑体内部发射电磁波,获取所述填筑路基的所述扫描特征图,其中,采用蛇形井字形叠合方式对所述填筑路基进行碾压夯实。
16.可选地,基于所述扫描特征图获取填筑路基压实度,包括:
17.基于卷积神经法提取所述扫描特征图中小于预设数值的像素块,计算所述像素块在所述扫描图中所有像素块的比值,获得填筑路基的孔隙率,基于所述孔隙率获取所述填筑路基压实度。
18.可选地,所述卷积神经法为:
[0019][0020]
其中,f(x,y)为原图片对应(x,y)处的值,g(t δx,y δy)为对原函数进行映射、偏置后对应(x δx,y δy)上的值,δx为对图片像素x轴上的偏置量,δy为对图片像素y轴上的偏置量,y(t)为x(t)和h(t)的结果函数,x(t)为输入函数,h(t)为响应函数。
[0021]
可选地,基于卷积神经法提取所述扫描特征图中小于预设数值的像素块包括:
[0022]
对扫描特征图的不同特征进行提取,获取原始特征图,将不同尺寸或不同特征的卷积核一起组成一个单元,将所述原始特征图和一个单元内的不同卷积核进行卷积操作。
[0023]
可选地,将所述原始特征图和一个单元内的不同卷积核进行卷积操作包括:
[0024]
在进行卷积操作前对所述扫描特征图进行padding操作,不同尺寸大小的卷积核对应不同的padding层数,卷积操作中卷积步长均设置为1,分别输出若干份和原图像同样像素大小的图片,采用relu激活函数对输出图片进行处理,消除卷积过程中产生的非零像素,再将其作为神经网络的输入,开展下一层卷积操作,卷积的过程中,始终保持图像的像素尺寸不变。
[0025]
可选地,基于所述孔隙率获取所述填筑路基压实度的方式为:
[0026][0027]
其中,p为压实度,为孔隙率。
[0028]
可选地,获取填筑路基变形数据包括:
[0029]
在施工过程中实时获取所述填筑路基的荷载情况、材料属性、断面形状和尺寸,并将其输入至所述填筑路基计算模型中,输出所述填筑路基变形数据;其中,所述填筑路基变形数据包括:所述填筑路基的位移变形和应力分布。
[0030]
与现有技术相比,本发明具有如下优点和技术效果:
[0031]
1.本发明基于混合现实技术,提出一种土石混合路基精确填筑施工技术,结合现有成熟的快速扫描技术和卫星定位技术,将填筑面实时点云数据耦合进填筑路基虚拟模型中,较为直观的判断填筑量是否满足设计要求。避免少填延误工期,超填不易压实的潜在风险;
[0032]
2.本发明通过在路基压实过程中,不断向填筑体内部发射电磁波,并接收反射信号,结合颜色编码,将反射信号转变为填筑体内部特征扫描图。通过卷积神经方法,采用不同的卷积核提取扫描特征图的孔隙特征,进而快速判断压实路段的孔隙率和压实度。有效弥补了实际工程中随机抽样检测压实度的不全面、费时费工等缺点。能够更加高效的在路基压实阶段对不密实路段进行补救处理,减少路基在实际运营中可能产生的不均匀沉降、路基裂缝等病害。
[0033]
3.本发明将填筑断面简化,通过有限元二次开发平台对填筑路段进行快速建模,生成计算模型并计算,从而在固结沉降阶段基于数值模拟获取路基可能的工后沉降数据,结合少数观测点的实测沉降数据,即可更好的判断路基填筑质量,预测工后沉降量值,为保障路基长期稳定运营提供依据。
附图说明
[0034]
构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
[0035]
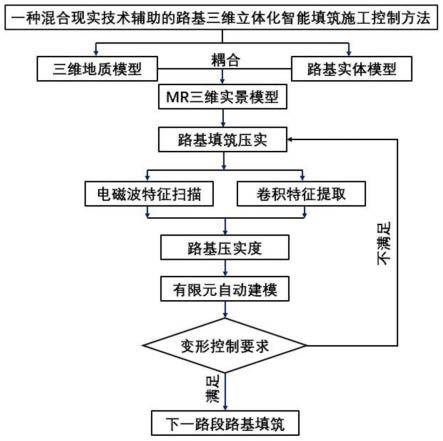
图1为本发明实施例的一种混合现实技术辅助的路基三维智能填筑施工控制方法流程示意图;
[0036]
图2为本发明实施例的基于混合现实技术辅助的路基三维智能填筑施工示意图;
[0037]
图3为本发明实施例的基于电磁波扫描和卷积神经网络估算路基密实度流程示意图;
[0038]
图4为本发明实施例的压实路基路径采用的蛇形井字形叠合压实方式示意图;
[0039]
图5为本发明实施例的基于有限元二次开发平台填方路基15层填筑数值模型示意图;
[0040]
其中,1、定位卫星;2、基站;3、gps接收天线;4、电磁波扫描装置;5、施工机械;6、三维激光扫描装置;7、已填筑路基;8、未填筑路基虚拟模型;9、电磁波扫描特征图;10、填筑路基三维实景图;11、有限元快速建模模型;12、三维地形图;13、云端。
具体实施方式
[0041]
需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
[0042]
需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
[0043]
实施例
[0044]
本实施例提供了一种混合现实技术辅助的路基三维智能填筑施工控制方法,包括:
[0045]
将填筑路段的三维地质模型和路基实体模型进行耦合,获取mr三维实景模型;
[0046]
获取填筑机械的实时三维定位信息和填筑体表面的控制点相对点云坐标,将所述实时三维定位信息和控制点相对点云坐标进行耦合,获取实时填筑面绝对三维坐标,将所述实时填筑面绝对三维坐标与所述mr三维实景模型进行关联,基于关联结果控制路基的填筑方量;
[0047]
基于电磁波探测获取路基的电磁波扫描特征图9,基于电磁波扫描特征图9获取填筑路基压实度;
[0048]
基于所述路基实体模型,简化为平面应变问题,取半结构分析,获得填筑路基简化计算模型,将填筑路基变量参数输入至所述填筑路基计算模型,获取填筑路基变形数据;
[0049]
基于所述路基实体模型获取填筑路基计算模型,将填充路基变量参数输入至所述填筑路基计算模型,获取填筑路基变形数据;
[0050]
基于所述孔隙率、填筑路基压实度和所述填筑路基变形数据,判断路基变形控制指标是否满足设计要求,若不满足,则重新获取所述孔隙率和填筑路基压实度。
[0051]
进一步的,将填筑路段的三维地质模型和路基实体模型进行耦合包括:
[0052]
基于设计路基的断面特征构建所述三维地质模型,基于高程信息构建路基实体模型,将所述三维地质模型和所述路基实体模型进行耦合,并将整体关联至相应的大地坐标系。
[0053]
进一步的,获取填筑机械的实时三维定位信息和填筑体表面的控制点相对点云坐标包括:
[0054]
在填筑机械上配备gps接收天线3和三维激光扫描设备,在填筑过程中,定位卫星1向gps接收天线3实时发送所述填筑机械的三维空间坐标信息,结合基站2发送的差分信号综合生成所述填筑机械的所述实时三维定位信息,通过所述三维激光扫描设备获取填筑体表面的所述控制点相对点云坐标。
[0055]
进一步的,基于电磁波探测获取路基的电磁波扫描特征图9包括:
[0056]
在路基填筑完成后,对路基进行碾压夯实的过程中,通过电磁波扫描装置4不断向填筑体内部发射电磁波,获取路基的电磁波扫描特征图9,其中,所述路基的碾压夯实采用蛇形井字形叠合方式。
[0057]
进一步的,基于所述扫描特征图获取填筑路基压实度;包括:
[0058]
基于卷积神经法提取所述扫描特征图中小于预设数值的像素块,计算所述像素块在所述扫描图所有像素块中所占的比例,获得填筑路基的孔隙率,基于所述孔隙率获取所
述填筑路基压实度。
[0059]
进一步的,基于卷积神经法提取所述扫描特征图中小于预设数值的像素块包括:
[0060]
对扫描特征图的不同特征进行提取,获取原始特征图,将不同尺寸或不同特征的卷积核一起组成一个单元,将所述原始特征图和一个单元内的不同卷积核进行卷积操作。
[0061]
进一步的,将所述原始特征图和一个单元内的不同卷积核进行卷积操作包括:
[0062]
在进行卷积操作前对所述扫描特征图进行padding操作,不同尺寸大小的卷积核对应不同的padding层数,卷积操作中卷积步长均设置为1,分别输出若干份和原图像同样像素大小的图片,采用relu激活函数对输出图片进行处理,消除卷积过程中产生的非零像素,再将其作为神经网络的输入,开展下一层卷积操作,卷积的过程中,始终保持图像的像素尺寸保持不变。
[0063]
进一步的,获取填筑路基变形数据包括:
[0064]
在施工过程中实时获取所述填筑路基的荷载情况、材料属性、断面形状和尺寸,并将其输入至所述填筑路基计算模型中,输出所述填筑路基变形数据;其中,所述填筑路基变形数据包括:所述填筑路基的位移变形和应力分布。
[0065]
如图1-图2所示,本实施例所提供的一种基于混合现实技术辅助的路基三维立体化智能填筑施工控制方法,具体包括:
[0066]
步骤1:基于cad三维建模软件获得填筑路基与填筑段天然地形耦合的填筑路基三维实景图10,并将实景模型文件导入施工机械mr终端呈现硬件。
[0067]
基于填筑路段等高线地形图及全站仪特征高程点数据文件,在南方cass10软件中通过菜单栏,绘图处理按钮-》选择展高程点选项,提取特征高程点数据文件中的高程点信息。选择模式2,选取所有高程点生成数据文件。然后通过菜单栏工程应用按钮,将生成的文件保存为全站仪数据格式的无编码高程点数据文件。然后,新建一个空白文档,通过菜单栏等高线按钮,绘制三维模型命令,打开上诉保存的无编码高程点形式的数据文件。高程系数选择1.0,网格间距选择5m,拟合,生成填筑路段的三维地形图12。通过3d环绕功能,查看模型坐标与高程值是否一致,最后保存为三维地形坐标dwg文件。打开cad-2020,首先使用有限元快速建模模型11创建路基三维路基虚拟模型。通过直线命令绘制三维路基横断面,再通过拉伸命令生成虚拟路基实体。然后,打开生成的三维地形坐标文件,调整文件像素的宽高比,保证三维地形图12比例正确。最后,在软件中将三维路基虚拟模型和三维地形图12耦合,并将整体关联至相应的大地坐标系,允许误差不超过实际特征尺寸的1%。并将实景模型文件导入施工机械mr终端呈现硬件。
[0068]
步骤2:填筑过程中耦合填筑机械坐标和填筑面坐标,并隐藏还未填筑的虚拟路基层。只保留当前这在填筑的路基层虚拟模型。通过mr硬件终端,精确控制填筑方量。
[0069]
每台施工机械5均配备安装有gps接收天线3和三维激光扫描装置6,在路基填筑过程中,施工机械5通过gps接收天线3实时获取定位卫星1发送的填筑机械三维空间坐标信息,结合基站2发送的差分信号综合生成填筑机械厘米级三维定位信息;通过三维激光扫描装置6,获取填筑体表面的控制点相对点云坐标,精度控制在垂直误差不超过20mm、水平误差不超过50mm。耦合填筑机械三维位置坐标及填筑面点云数据,到基于相应大地坐标系的实时填筑面绝对三维坐标。并将其实时关联至步骤1获得的填筑路基三维实景模型10中。基于路基的分层施工条件,填筑阶段将虚拟模型中还未填筑路段及分层的路基模型隐藏(即
隐藏未填筑路基虚拟模型8),只保留已填筑路基7的虚拟三维模型,通过mr硬件终端,实时观测到当前填筑量与设计填筑量的差异。更准确、便捷的控制填筑质量,避免超填不易压实,少填延长工期等问题。
[0070]
步骤3:路基碾压夯实的过程中,通过电磁波探测,结合颜色编码将路基扫描特征线转化成电磁波扫描特征图9。利用卷积神经方法,对特征图进行处理,获得代表孔隙的黑色像素点在整张扫描特征图像素尺寸中所占的比重,即孔隙率,进一步通过孔隙率估算填筑路基压实度。
[0071]
路基分层填筑完成后,在路基分层碾压夯实的过程中,基于压实机械上的控制主机,控制电磁波扫面装置4不间断向填筑体内部发射中心频率为100mhz、脉冲宽度为0.15ns的短脉冲电磁波。可以保证电磁波的探测深度。压实路径采用蛇形井字形叠合方式,方便确定不密实区域的纵横向范围。通过接收装置接收电磁波,依据下式计算电磁波在不同介质中的传播速度;
[0072]
其中,εr为该种介质的介电常数,c为光速,v为电磁波在该介质中的传播速度。
[0073]
依据下式计算电磁波在界面反射处距地表的深度。
[0074]
其中v为电磁波在该种介质中的传播时间,t为发射到接收电磁波的时间。
[0075]
电磁波每发射一次都会生成一个扫描点,连接所有扫描点,得到扫描线。基于颜色编码(0-255个数字,每个数字都代表纯白色到纯黑色之间的一种不同灰度的颜色),将扫描线的每一个波峰对应到颜色编码上,其波峰长度即对应0-255中的一个长度(例如最大正波峰,则对应于255,代表纯白色像素,最大负波峰,对应于0,代表纯黑色像素)。则经过一段压实路基的扫描,即可获得一张由不同数字组成的填筑体内部特征扫描图像。
[0076]
基于下式判断电磁波在不同介质中传播的:
[0077]
其中,ε1为电磁波经过的第一种介质的介电常数,ε2为电磁波经过的第二种介质的介电常数,r为反射系数。反射系数若为正,则扫描线主相位为正波,像素特征偏白,反之偏黑。基于此,当填筑路段存在密实度不足的区段时,其中必存在较大孔隙。孔隙介电常数偏小,填料介电常数偏大,反射系数为负。因此,填筑路段的较大孔隙在特征扫描图像中数值偏小,趋近于0。因此,只需提取出特征扫描图中的数值较小处的像素块,即可基于偏白像素块在整张扫描特征图像素块中所占的比重,计算出该填筑压实路段的孔隙度,进一步通过孔隙度快速估算出该段路段的压实度。
[0078]
如图4所示,压实路基路径采用蛇形井字形叠合方式,目的是能尽量均匀的对路基的所有部位进行压实操作,同时能够使得扫描装置对路基的所有部位进行扫描。从而能够更加精确的确定填筑路基内部孔隙的范围,保证路基的填筑质量。
[0079]
在步骤3中,基于扫描特征图,采用卷积神经法提取扫描特征图中代表孔隙的特征像素点。基于如下卷积公式:
式中:f(x,y)为原图片对应(x,y)处的值,g(x δx,y δy)为对原函数进行映射、偏置后对应(x δx,y δy)上的值。
[0080]
卷积过程中,可采用不同尺寸的卷积核,以便观察到原图不同范围内的特征点;或采用一种尺寸但对应位置权重不同的卷积核,目的是针对原始图片的不同特征进行提取。不同尺寸或不同特征的卷积核一起组成一个单元。将原始特征图和一个单元内的不同卷积核进行卷积操作。
[0081]
在python环境下进行卷积操作。导入numpy和cv包。基于cv包的imread方法读取图片文件,参数分别是图片的绝对路径字符串和读入图片的标志。在本实例中,图片标志设置为cv2.imread_grayscale,代表读入灰度图。选用如图3所示的卷积核。卷积操作前,对原扫描特征图分别进行padding操作,padding参数设置为1,卷积步长也设置为1。目的是保证经过卷积操作后图片的像素大小保持不变。采用relu激活函数对输出图片进行处理,保证卷积过程中产生的像素值均为正整数。在生成的结果文件中,趋近于255值代表的像素点即表示是相对密实段,趋近于0值代表的像素点则表示可能存在的孔隙。采用循环操作,计算小于10阈值的像素点在整张图片像素尺寸中所占的比重。结果为图片像素尺寸为(1440,2153),小于10阈值的像素点个数为168844个,基于下式即可快速估算出填筑压实路基的压实度。
[0082]
上式中:p代表压实度,代表孔隙率,%。
[0083]
则该段路基的孔隙率为:
[0084]
168844/1440/2153≈0.06,即该检测段路基的压实度为:1-0.06=0.94。
[0085]
步骤4:将填筑体简化成二维平面应变问题,基于有限元二次开发模块,自动生成填筑路基计算模型。提交计算并自动提取填筑路基变形数据。
[0086]
首先对填筑路基模型进行简化,考虑到填筑路基纵向尺度较大,采用平面应变问题进行变形受力分析。基于通用有限元软件二次开发平台,采用对应的编程语言,实现模型实例的自动化结构化创建。具体包括:首先导入有限元软件在该开发平台中对应的模块。例如abaqus导入section、part等一系列模块、plaxis导入plaxis模块、ansys导入ansys-mapdl-core、pyaedt等一系列模块。然后依据编程语言对应模块的初始化方法创建新项目或新实例,通过调用实例的子方法完成模型的尺寸设置、结构划分、集合赋予等操作。针对高度结构化的模型,可采用for循环完成实例的上诉重复操作。进一步的,通过材料模块实现模型的材料属性设置和赋予;通过分析步模块实现模型的分析步设定,更改分析步模块中子方法的实际参数,设置分析步的类型、时常、初始值、容差等属性;调用基于实例的荷载模块下的子方法完成模型的荷载施加和边界条件设置。最后,通过基于实例的网格划分模块的子方法完成模型的网格生成,网格属性设置等操作并提交计算。根据上述方法,只需预先设定好计算模型的本构方法和边界条件,通过在施工过程中实时获取填筑路基的荷载情况、材料属性、断面形状及尺寸等变量,再将其作为实际参数传入编写好的有限元二次开发建模程序中,即可自动生成计算模型,提交计算并获取基于当前外部条件下的填筑路基的位移变形、应力分布等关键数据。
[0087]
考虑到填筑路基的纵向尺度较长,同时三维模型计算量较大。本实例中将计算模
型简化为二维平面应变问题。路基顶宽为15米,底宽为120米,坡度为1:2,路基高度为35米;地基宽度为150米,厚度为40米。考虑最小层厚为2米一层。因此需要分约18层填筑。本次实例基于abaqus软件的二次开发平台,实现简化路基的快速建模分析。
[0088]
首先在abaqus命令窗口输入
[0089]
session.journaloptions.setvalues(replaygeometry=coordinate,recovergeometry=coordinate),将转换方式方由索引号转换转变为由坐标点转换。然后,第一步:创建part实例对象,保持默认参数。基于传入函数中的形参:路基顶宽b1,底宽b2、填筑高度h1、地基宽度b、地基厚度h,使用实例对象的line方法创建实体,采用循环语句对实体进行分割,模拟分层填筑的情况;创建实例对象的parts属性,基于边、面的findat方法,使用坐标值定位,采用循环语句对划分出的各个部分依次创建set、face,并采用结构化的形式命名;第二步:对模型实例的各个部分采用materials方法下的abaqus材料库中提供的子方法分别赋予不同的材料属性,本实例中路基材料采用邓肯-张模型,地基材料选用摩尔-库伦模型。分层填筑路基采用循环语句赋予材料属性,然后对模型进行装配执行实例下的rootassembly方法将模型进行装配;第三步:采用实例模型的geostaticstep方法创建地应力分析步,采用循环语句及soilsstep子方法创建分层填筑荷载施加及固结沉降分析步,在分析步的形式参数中设置相应的增量步名称、前置增量步、初始增量步、最小增量步、最大增量步及允许误差等参数;第四步:采用实例的modelchange方法,利用循环语句将路基填筑部分在地应力分析步中“杀死”,对应参数设置为activeinstep=false;再采用循环语句在各对应分析步中将对应填筑分层重新“激活”,参数设置为activeinstep=true;第五步:因为在上诉第一步创建set和face中采用了结构化的命名方式,因此可采用循环语句设置模型的位移约束和荷载情况;采用实例模型的displacementbc方法设置边界约束,创建时间参数设置为initial;实例模型的bodyforce方法设置模型的荷载情况,createstepname参数分别设置为对应的加荷分析步名称;第六步:通过判断语句设置网格种子尺寸,若填筑层厚大于2m,种子尺寸赋予1;否则,种子尺寸设置为填筑层厚的1/2;通过mesh的elemtype设置网格属性,elemcode设置为cpe4,elemlibrary设置为standard。最后通过generatemesh方法生成网格,并提交计算,提交计算前生成的其中一个有限元模型如图5所示。
[0090]
步骤5:判断填筑体在当前条件下的工程变形控制指标是否满足规范设计使用要求。若不满足要求,则返回步骤3,重复处理直至其满足要求。
[0091]
结合所述步骤3得到填筑路基孔隙率、压实度特征、及所述步骤4中得到的变形计算结果,综合判断路基变形控制指标是否满足设计要求,并将最终数据传入云端13,以便后续分析工作。若不满足设计使用要求。则需针对上诉分析结果中反应的路基不密实段进行重复处理直至满足变形控制要求,整体施工示意图如图2所示。
[0092]
以上,仅为本技术较佳的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。