1.本发明涉及一种用于创建例如用于分割和对象检测的机器学习系统的方法、一种相对应的计算机程序和一种具有该计算机程序的机器学习存储介质。
背景技术:
2.神经网络的架构搜索的目的在于:就性能关键指标/衡量标准而言为指定的数据集完全自动地找到尽可能好的网络架构。
3.为了使自动架构搜索在计算上高效,搜索空间中的不同架构可以共享它们的操作的权重,诸如在一次(one-shot) nas模型的情况下,通过pham, h., guan, m. y., zoph, b., le, q. v., & dean, j. (2018).efficient neural architecture search via parameter sharing. arxiv preprint arxiv:1802.03268所示。
4.在此,一次(one-shot)模型通常被构造为有向图,其中节点表示数据并且边表示操作,这些操作表示将边的输入节点转变成输出节点的计算规则。在此,搜索空间由该一次模型中的子图(例如路径)组成。由于一次模型可能非常大,所以可以从该一次模型中提取、尤其是随机提取单独的架构用于训练,诸如通过cai, h., zhu, l., & han, s. (2018). proxylessnas: direct neural architecture search on target task and hardware. arxiv preprint arxiv:1812.00332所示。这通常通过提取从网络的所规定的输入节点到网络的输出节点的单个路径来实现,诸如通过guo, z., zhang, x., mu, h., heng, w., liu, z., wei, y., & sun, j. (2019).single path one-shot neural architecture search with uniform sampling. arxiv preprint arxiv:1904.00420所示。
5.对于如对象检测那样的特定任务或者在多任务网络的情况下,需要网络具有多个输出。在此,对完整的一次模型的基于梯度的训练可以针对这种情况来被修改,诸如通过chen, w., gong, x., liu, x., zhang, q., li, y., & wang, z. (2019). fasterseg: searching for faster real-time semantic segmentation. arxiv preprint arxiv:1912.10917所示。但是,这又并非内存高效,而且在架构搜索的框架内进行训练期间并没有表明提取具有分支并且具有不同输出的架构。
6.作者cai等人在他们的出版物proxylessnas: direct neural architecture search on target task and hardware, 可在线获取: https://arxiv.org/abs/1812.00332中公开了一种考虑硬件特性的架构搜索。
7.本发明的优点本发明改善了针对具有多个输出的、其架构具有多个路径的多任务网络的架构搜索,其方式是在该架构搜索开始时在没有对各个路径的隐含偏好的情况下从一次模型中提取路径。由此,搜索空间的所有架构最初都以相同概率被提取并且因此该搜索空间被无偏地探索。这具有如下优点:最终可以为多任务网络找到更优越的架构,这些架构在对一次模型的边和/或节点的(提取)概率的正常初始化时不会被展开。
技术实现要素:
8.在第一方面,本发明涉及一种用于创建机器学习系统的计算机实现的方法,该机器学习系统被设立用于对图像的分割和对象检测,其中该机器学习系统具有用于记录图像的输入以及一个或多个输出,其中第一输出输出图像的分割并且第二输出输出对象检测。替代地,第二输出可以输出图像上的对象的另外的对象描述,如对象分类。
9.该方法包括如下步骤:提供有向图,其中该有向图具有一个输入节点和一个输出节点以及多个其它节点。应当注意:也可设想的是:该图具有多个输入和/或输出节点。这些输入和输出节点经由其它节点借助于有向边来连接,而且这些节点表示数据并且这些边表示操作,这些操作可以是将这些边的第一节点转变成与相应的边连接的另一节点的计算规则。应当注意:数据和计算规则的分配也可以反过来。
10.这些边分别分配有概率,该概率表征相应的边尤其是在选择经过该图的路径时被提取的概率。对该路径的选择优选地是根据这些边的概率对这些边的随机的、尤其是迭代的提取。
11.然后,选择经过该图的路径。在此,首先从所述多个其它节点中确定子集,该子集全部满足例如关于数据分辨率的指定特性或者节点相对于输入节点的深度,以便确保指定的接受场。从该子集中选择至少一个附加节点(感兴趣的节点(node of interest),noi),该附加节点可以直接用作第二输出。然后,选择经过该图的从输入节点沿着这些边经由该附加节点(noi)到达输出节点的路径。这里,该路径可以被理解成有向图的所选择的节点的序列,在该序列中每两个连续的节点通过一条边来连接。在此,当架构只具有一条经过该有向图的路径时,该路径可以完全表征该架构。也可设想的是:该路径只描述了该架构的一部分,即当该架构具有经过该图的多个路径时。
12.应当注意:该附加节点可以用作输出并且这里例如输出对象分类;或者在该输出处连接对象分类头(英文dection head),接着该对象分类头根据该附加节点的输出来确定对象分类、尤其是对象描述。
13.对该路径的选择可以迭代地进行,其中在每个节点处根据与该节点连接的可能的后续边的所分配的概率来从这些边中随机选择后续边。该做法在下文称为路径的提取。即,该路径表示输入节点与输出节点的直接连接。
14.如果该架构应该具有多个路径,则可以相对应地多次重复前一步骤“选择路径”,并且然后可以依据多个被提取的路径来创建机器学习系统。
15.接着,根据与所选择的路径对应的架构来创建机器学习系统并且指导(anlernen)所创建的机器学习系统,其中该机器学习系统的经适配的参数被寄存在有向图的对应的边中并且该架构的边的概率被适配。在这种情况下,对这些概率的适配可以通过所谓的黑盒(black-box)优化器来实现,该黑盒优化器例如应用reinforce(强化)算法(为此例如参见上文引用的文献“proxylessnas”),以便估计用于使这些边的概率适配的梯度。
16.选择一个/多个路径和创建机器学习系统以及指导的步骤可以多次相继被实施,优选地直至参数的变化足够小为止。
17.在最后一个步骤中、尤其是在对这些边的概率的优化之后对路径的提取可以随机进行,或者有针对性地选择具有最高概率的边。
18.该方法的特别之处在于:有向图被提供为使得这些边的概率最初被设置到一个
值,使得经过该有向图的所有路径、尤其是架构都以相同概率被提取。这里,“最初”可以被理解为:在实施指导的第一步骤之前进行这些边的概率的这种初始化。在指导时,这些概率可以被适配,使得在指导过程之后,这些边的高概率表明这些边对于机器学习系统的架构来说是重要的。对这些概率的这种特殊初始化产生如下优点:通过在指导之前对这些概率进行初始归一化,确保了对所有可能的架构的探索都无偏地被执行。这带来了有利的效果:通过该特殊初始化可以找出更好的架构,这些架构在没有归一化的情况下就不会被找到,原因在于这些架构在开始时没有被探索或者仅仅不充分地被探索。
19.即,可以说:所提出的方法具有如下优点:借此,可以为用于图像处理(例如姿势识别或对象距离估计等等)的多任务(multi-task)任务找出性能特别卓越的机器学习系统,尤其是人工神经网络。
20.附加地或替代地,人工神经网络的任务可以如下:自然语言处理(英文natural language processing)、自编码器、生成模型(英文generative models)等等,其中不同的输出分别表征关于任务的输入信号的不同特性。
21.提出:针对该子集的每个节点,对从该子集的相应节点直至输入节点为止的第一子路径的总数和到输出节点的第二子路径的总数进行计数。优选地,包含在这些第一子路径中的那些边的概率根据这些第一子路径的总数来被确定,并且包含在这些第二子路径中的那些边的概率根据这些第二子路径的总数来被确定。例如,包含在这些第一子路径中的那些边的概率可以分别最初被设置到将输入节点与该子集的相应节点连接并且经由相应的边延伸的可能的路径的数目除以第一子路径的总数。以同样的方式,包含在这些第二子路径中的那些边的概率分别最初被设置到将输出节点与该子集的相应节点连接并且经由相应的边延伸的可能的路径的数目除以第二子路径的总数。
22.应当注意:对这些子路径的总数的确定可以进行为使得首先从该附加节点(noi)出发向后经过该图到输入节点地创建第一子路径并且从该附加节点(noi)到输出节点地创建第二子路径。接着,重复该做法,直至所有可能的第一和第二子路径都被检测到了为止。为此,应当注意:第一子路径和第二子路径共同得出该路径。
23.对第一和第二子路径的分开搜索可根据此的用于实现提取概率的归一化的做法具有如下优点:借此,关于相对应的noi,可以选择适合的概率。此外,该做法可以并行地被实施,原因在于对这些子路径的分开搜索彼此独立。借此,该方法可以在并行的计算架构上特别好地被实施。
24.还提出:该子集的全部满足关于数据分辨率的指定特性的其它节点也分别分配有概率,其中这些概率被归一化。该子集的节点的概率尤其是被归一化为使得从提取该子集的节点开始并且接着提取路径的路径提取引起对所有可能的路径的概率相同的提取。优选地,对该子集的节点的概率的归一化独立于对这些边的概率的归一化。“归一化”可以被理解为:对相应元素的提取的概率相同,即最初不存在对某些noi和/或边和/或路径的偏好。
25.与对于这些边的概率来说相同,在提取路径时,这些附加节点(noi)根据其所分配的概率来被提取。此外,该概率也在指导时被适配,例如使用黑盒优化器。
26.还提出:所述其它节点的子集中的节点的概率最初被设置到如下概率,即经过所述其它节点的子集中的相应节点的路径的数目除以经过该有向图的路径的总数。
27.换言之,提取该子集的节点的概率接着被设定到经过该子集的相应节点的路径的
数目除以经过该子集的节点中的每个节点的路径的总数。
28.在应用分开搜索第一和第二子路径的方法的情况下,可以通过来限定该子集的节点的概率,其中经过该子集的所考虑的节点的第一子路径的数目是并且经过该节点的第二子路径的数目是。
29.针对该子集的边和/或节点的概率优选softmax(软最大)函数,并且接着根据该softmax函数的输出来随机提取边/节点。这具有如下优点:该softmax函数保证了该子集的边/节点的概率的累积始终为1。该优点所产生的有利效果是:路径提取的概率特征保持不变并且借此更可靠地找出最佳架构。
30.这些附加节点(noi)的概率的归一化的优点在于:经此,实现了对一次模型中的所有可能的架构的完全平等处理,尤其是在一次模型的可能架构的总数中每个架构都可以概率为一地被提取。
31.还提出:该图的其它节点的子集中的节点(noi)的概率最初被设置到相同概率,即该子集的所有节点最初都以相同概率被提取。由此,不再是所有架构都具有相同概率,而是所有具有相同noi的架构仍具有相同概率。尽管如此,已经发现:这种配置在很多应用中同样带来了良好的架构。借此,可以省去前一步骤,即:根据经过这些附加节点(noi)的路径的数目来确定这些附加节点(noi)的概率。
32.提出:选择至少两个附加节点(noi),并且架构具有至少两个路径,所述至少两个路径分别经由这些附加节点之一延伸到输出节点。因此,该架构具有至少一个分支,信息在通过机器学习系统传播时在该至少一个分支之后经过不同的路线到达该机器学习系统的输出。第二附加节点可以输出另一图像特性。这两个路径可以从输入节点到附加节点地在这些附加节点处开始直至输入节点为止地彼此独立地被创建。可以说:确定子图,该子图有效地描述了经过该图的至少两个相交路径或者一个分岔路径。还应当注意:这些路径可以分别由第一和第二子路径组成并且可以相对应地被提取。
33.还提出:当这两个路径中的第二路径与这两个路径中的已经被提取的第一路径相遇时,针对该第二路径使用该第一路径的剩余部分。
34.还提出:从这些附加节点出发,创建到达输出节点的其它路径。应当注意:这些路径接着共同得出该有向图的子图。
35.还提出:其它路径彼此独立地被提取,并且当这些其它路径相遇时,继续使用已经被提取的路径。
36.在这方面有利的是:利用该做法可以找出趋势上更优化且更小的架构。
37.还提出:在指导机器学习系统时,优化成本函数,其中该成本函数具有第一函数,该第一函数评估机器学习系统的关于其分割和对象识别/对象描述方面的工作能力,并且该成本函数具有第二函数,该第二函数根据路径的长度和边的操作来估计机器学习系统的延迟时间等等。
38.还提出:在创建机器学习系统时,将至少一个输出层添加到附加节点(noi)上。优选地,该输出层是softmax(软最大)层。
39.在其它方面,本发明涉及:一种计算机程序,该计算机程序被设立为实施上述方
法;和一种机器可读存储介质,在其上存储有该计算机程序。
附图说明
40.随后,本发明的实施方式参考随附的附图更详细地予以阐述。在附图中:图1示意性示出了具有一个输入节点和一个输出节点以及两个“感兴趣的节点”(noi)的一次模型;图2示意性示出了对从第一noi到输入的第一路线的向后提取;图3示意性示出了对从第二noi到输入的第二路线的向后提取;图4示意性示出了对从第二noi到输入的带有中断的第二路线的向后提取;图5示意性示出了对开始于第一noi到输出的两个路径的向前提取;图6示出了一次模型的边的归一化概率的初始分配的示意图;图7示出了本发明的实施方式的流程图的示意图;图8示出了执行器控制系统的示意图;图9示出了用于控制至少部分自主机器人的实施例;图10示意性示出了用于控制生产系统的实施例;图11示意性示出了用于控制访问系统的实施例;图12示意性示出了用于控制监控系统的实施例;图13示意性示出了用于控制私人助理的实施例;图14示意性示出了用于控制医学成像系统的实施例;图15示出了训练装置的可能的结构。
具体实施方式
41.为了为指定的数据集找到深度神经网络的良好架构,可以应用自动的架构搜索方法,即所谓的神经架构搜索(neural architecture search)方法。为此,神经网络的可能的架构的搜索空间显性地或隐性地被限定。
42.在下文,为了描述搜索空间而应该使用术语“操作(operation)”,这描述了将一个或多个n维输入数据张量转变成一个或多个输出数据张量的计算规则并且在此可具有自适应参数。在图像处理中,例如通常使用具有不同内核大小的卷积和不同类型的卷积(常规卷积、深度可分离(depthwise-separabel)卷积)以及池化操作,作为操作。
43.在下文,还应该限定计算图(所谓的一次模型),该计算图包含搜索空间中的所有架构作为子图。由于一次模型可能非常大,所以可以从该一次模型中提取单独的架构用于训练。这通常通过提取从网络的所规定的输入节点到网络的所规定的输出节点的各个路径来实现。
44.在最简单的情况下,当该计算图由可分别经由不同操作来连接的节点的链组成时,对于每两个连续的节点来说提取使这两个连续的节点连接的操作就足够。
45.更一般地,如果该一次模型是有向图,则可以迭代地提取路径,在该路径中从输入开始接着提取下一个节点和进行连接的操作,并且接着迭代地继续该做法直至目标节点为止。
46.接着,在有提取的情况下的一次模型可以被训练,其方式是针对每个小批量
(mini-batch)都提取架构并且借助于标准梯度渐进法来使所提取的架构中的操作的权重适配。找到最好的架构要么可以在对权重的训练之后作为单独的步骤进行,要么可以与对权重的训练交替地被执行。
47.在一个实施方式中,为了从一次模型中提取具有分支和多个输出的架构,可以反向使用针对路径的采样模型。为此,针对一次模型的每个输出都可以提取路径,该路径从该输出开始引导到该一次模型的输入。为了提取这些路径,为此可以考虑转置的一次模型,在该转置的一次模型中,所有有向边都指向与在原来的一次模型中相反的方向。
48.一旦提取了第一路径,就可能发生:下一个路径到达前一个路径的节点。在这种情况下,可以结束对当前路径的提取,原因在于已经存在从共同节点到输入的路径。替代地,可能的是:尽管如此仍继续提取该路径并且如果可能的话获得到达输入节点的第二路径。
49.附加地,应该考虑如下情况:所提取的架构包含:一次模型的一个或多个节点,所述节点不在网络的全深度内并且在下文称为noi(“感兴趣的节点(nodes of interest)”);以及在一次模型的全深度内的输出。在这种情况下,可以通过针对noi的向后提取来创建路径,以便使这些noi与输入连接。附加地,还执行针对每个noi的向前提取,这些向前提取引导到一次模型的输出。与在向后提取时一样,在向前提取时一旦到达已经引导到输出的路径就可以中断该提取。
50.作为向后提取的替代方案,可以进行纯向前提取,其方式是针对每个noi提取从输入到相对应的noi的路径。这通过如下方式来被实现:该提取只在子图上被执行,该子图由位于从网络的输入到当前noi的路径上的所有节点以及一次模型的在这些节点之间的所有边组成。
51.一个实施例是用于对象检测和语义分割的多任务网络。在此,noi是可以在其上安置对象分类输出(英文detection head(检测头)或者object detection head(对象检测头))的节点。附加地,在网络的全深度内的输出处还使用用于语义分割的输出。
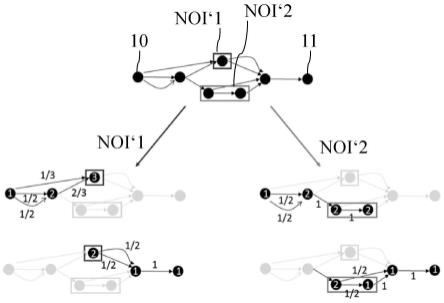
52.自动架构搜索首先需要创建搜索空间(图7中的s21),该搜索空间这里以一次模型的形式来被构造。在此,该一次模型包含一个输入节点(10)、一个输出节点(11)和在该模型的中间(也就是说不是在全深度内)的多个节点,这些节点必须是所提取的架构的一部分并且称为noi(nodes of interest)。在此,该一次模型被设计为使得所有路径都从输入节点开始引导到输出节点(参见图1-5)。
53.针对中的每个节点,限定在传出边上的概率分布。针对每个节点并且针对每个路径、优选地每组noi,可以限定在架构内单独的概率分布。也就是说,在架构内的不同路径使用不同概率。附加地,考虑转置的一次模型,该转置的一次模型具有相同的节点,但是全部有向边都指向相反方向。针对,同样针对每个节点引入在传出边上的概率分布(这对应于在中的传入边上的概率分布)。
54.对于向后提取来说,针对第一noi提取中的路径(图7中的23),该路径从该noi引导到一次模型的输入(参见图2)。这一点针对所有其它noi迭代地被重复(参见图3),其中一
旦到达去往输入的前一路径的节点,就可以中断对各个路径的提取(参见图4)。对于向前提取来说,针对第一noi提取中的路径,该路径从该noi引导到一次模型的输出。这一点针对所有其它noi迭代地被重复,其中一旦到达去往输出的前一路径的节点,就可以中断对各个路径的提取(参见图5)。
55.图5示意性示出了对开始于第一noi到输出的两个路径的向前提取。在提取第二noi的路径时,在此中断,原因在于到达了第一noi的路径的节点。因此,整体提取的架构包含两个noi以及一次模型的输出节点。
56.在每次提取架构时,noi都可能是不同的,原因在于这些noi也可以被随机提取。
57.接着,根据该图可以创建人工神经网络60(在图8中所示)并且如随后阐述的那样使用该人工神经网络。
58.图6示出了简单的一次模型的边的归一化概率的初始分配的示意图。示例性地选择两个noi,其中noi'1包括一个节点并且noi'2包括两个节点。接着,针对这些noi中的每个,首先向后到输入节点(10)地对子路径进行计数。对于noi'1来说,这里得出3个子路径。接着,给该子路径的每个边都分配归一化概率,使得这些子路径中的每个子路径都以相同概率被提取。由于这三个子路径中一次性有两个子路径延伸经过noi'1的两条传入边并且这三个子路径中的仅仅一个子路径延伸经过另一条传入边,所以给这些边分配1/3和2/3的概率。如下所示,接着针对从noi'1到输出节点(11)的向前提取实施同一做法。此外,也针对noi'2中的两个节点实施同一做法。
59.图7示意性示出了用于利用上述用于对概率进行初始化以及从图中提取架构的做法来创建机器学习系统的方法的流程图。
60.该方法可以开始于步骤s21,在该步骤中提供图。
61.然后是步骤s22。在该步骤中,对如图6中所阐述的边的概率进行归一化。
62.接着是步骤s23。在该步骤中,根据这些边的概率来从该图中提取架构。然后是指导所提取的架构以及通过该指导将经优化的参数和概率转移到该图中的已知步骤。
63.图8示出了在其周围环境20中与控制系统40进行交互的执行器10。以优选地均匀的时间间隔以传感器30、尤其是如视频传感器那样的成像传感器来检测周围环境20,该传感器也可以通过多个传感器来给出,例如立体摄像机。其它成像传感器也是可设想的,诸如雷达、超声或激光雷达(lidar)。热成像摄像机也是可设想的。传感器30的传感器信号s或在有多个传感器的情况下每个传感器信号s被传送给控制系统40。因此,控制系统40接收传感器信号s的序列。控制系统40据此确定操控信号a,这些操控信号被传输给执行器10。
64.控制系统40在可选的接收单元50中接收传感器30的传感器信号s的序列,该接收单元将传感器信号s的序列转换成输入图像x的序列(替代地也可以直接各采用传感器信号s作为输入图像x)。输入图像x例如可以是传感器信号s的片段或者对该传感器信号的进一步处理。输入图像x包括视频录制的各个帧。换言之,根据传感器信号s来确定输入图像x。将输入图像x的序列输送给机器学习系统、在该实施例中是人工神经网络60,该序列例如是按照图7的方法来被创建的。
65.人工神经网络60优选地通过参数来被参数化,这些参数寄存在参数存储器st1中
并且由该参数存储器来提供。
66.人工神经网络60根据这些输入图像x来确定输出参量y。这些输出参量y尤其可以包括这些输入图像x的分类和语义分割。输出参量y被输送给可选的改型单元80,该改型单元据此来确定操控信号a,这些操控信号被输送给执行器10,以便相对应地对执行器10进行操控。输出参量y包括关于传感器30已经检测到的对象的信息。
67.执行器10接收操控信号a,相对应地被操控并且实施相对应的行动。在这种情况下,执行器10可包括(不一定在结构上集成的)操控逻辑,该操控逻辑根据操控信号a来确定接着用来操控执行器10的第二操控信号。
68.在其它实施方式中,控制系统40包括传感器30。在另外其它实施方式中,替代地或附加地,控制系统40也包括执行器10。
69.在其它优选的实施方式中,控制系统40包括一个或多个处理器45和至少一个机器可读存储介质46,在该机器可读存储介质上存储有命令,当这些命令在处理器45上被执行时,这些命令促使控制系统40实施按照本发明的方法。
70.在替代的实施方式中,替代于执行器10或除了该执行器之外,还设置显示单元10a。
71.图9示出了控制系统40可以如何被用于控制至少部分自主机器人、这里是至少部分自主机动车100。
72.传感器30例如可以是优选地布置在机动车100中的视频传感器。
73.人工神经网络60被设立为根据输入图像x可靠地标识对象。
74.优选地布置在机动车100中的执行器10例如可以是机动车100的制动装置、驱动装置或转向装置。接着,操控信号a可以被确定为使得该执行器或这些执行器10被操控为使得尤其是当涉及特定类型的对象、例如行人时,机动车100例如防止了与由人工神经网络60可靠地标识的对象相撞。
75.替代地,该至少部分自主机器人也可以是其它移动机器人(未绘出),例如是这种通过飞行、漂浮、潜水或步行来移动的机器人。该移动机器人例如也可以是至少部分自主割草机或者至少部分自主清洁机器人。在这些情况下,操控信号a也可以被确定为使得移动机器人的驱动装置和/或转向装置被操控为使得该至少部分自主机器人例如防止与由人工神经网络60所标识的对象相撞。
76.替代地或附加地,可以利用操控信号a来操控显示单元10a,而且例如可以呈现所确定的安全区域。例如,在机动车100具有非自动化转向装置的情况下,也可能的是:显示单元10a利用操控信号a被操控为使得如果确定机动车100即将与可靠地标识的对象之一相撞,则该显示单元输出光学或声音报警信号。
77.图10示出了如下实施例,在该实施例中,控制系统40被用于操控生产系统200的生产机器11,其方式是对控制该生产机器11的执行器10进行操控。生产机器11例如可以是用于冲压、锯切、钻孔和/或切割的机器。
78.接着,传感器30例如可以是光学传感器,该光学传感器例如检测制成品12a、12b的特性。可能的是:这些制成品12a、12b能移动。可能的是:控制生产机器11的执行器10根据所检测到的制成品12a、12b的分配来予以操控,以便生产机器11相对应地实施制成品12a、12b中的正确的制成品的随后的加工步骤。也可能的是:通过标识制成品12a、12b中的同一制成
品的正确的特性(也就是说在没有错误分配的情况下),生产机器11相对应地将用于加工随后的制成品的相同的生产步骤适配。
79.图11示出了如下实施例,在该实施例中,控制系统40被用于操控访问系统300。访问系统300可以包括物理访问控制装置、例如门401。视频传感器30被设立来检测人员。借助于对象标识系统60,可以解释该所检测到的图像。如果同时检测到多个人员,则例如可以通过这些人员(即对象)彼此间的分配来特别可靠地确定这些人员的身份,例如通过对这些人员的移动的分析来特别可靠地确定这些人员的身份。执行器10可以是锁,该锁根据操控信号a来激活访问控制装置或者不激活访问控制装置,例如将门401打开或者不打开该门。为此,操控信号a可以根据对象标识系统60的解释来被选择,例如根据人员的所确定的身份来被选择。替代物理访问控制装置,也可以设置逻辑访问控制装置。
80.图12示出了如下实施例,在该实施例中,控制系统40被用于控制监控系统400。在图5中示出的实施例与该实施例的区别在于:替代执行器10,设置显示单元10a,该显示单元由控制系统40来操控。例如,人工神经网络60可以可靠地确定由视频传感器30所拍摄到的对象的身份,以便根据此例如推断哪些对象可疑,而且操控信号a接着可以被选择为使得该对象由显示单元10a用颜色来突出呈现。
81.图13示出了如下实施例,在该实施例中,控制系统40被用于操控私人助理250。优选地,传感器30是光学传感器,该光学传感器接收用户249的姿势的图像。
82.根据传感器30的信号,控制系统40确定私人助理250的操控信号a,例如其方式是神经网络执行姿势识别。接着,将该所确定的操控信号a传送给私人助理250并且该私人助理因此相对应地被操控。该所确定的操控信号a尤其可以被选择为使得该操控信号对应于用户249所设想的所希望的操控。该所设想的所希望的操控可以根据由人工神经网络60识别出的姿势来予以确定。接着,控制系统40可以根据所设想的所希望的操控来选择用于传送给私人助理250的操控信号a和/或选择用于传送给与所设想的所希望的操控相对应的私人助理250的操控信号a。
83.该相对应的操控例如可包含:私人助理250从数据库中调用信息并且以对于用户249来说可接受的方式来重现这些信息。
84.替代私人助理250,也可以设置家用电器(未绘出),尤其是洗衣机、炉灶、烤箱、微波炉或洗碗机,以便相对应地被操控。
85.图14示出了如下实施例,在该实施例中,控制系统40被用于控制医学成像系统500、例如mrt仪器、x光仪器或超声仪器。传感器30例如可以通过成像传感器来给出,通过控制系统40来操控显示单元10a。例如,神经网络60可以确定由成像传感器所记录的区域是否异常,而且操控信号a接着可以被选择为使得该区域由显示单元10a用颜色来突出呈现。
86.图15示出了用于训练从该图中提取的机器学习系统、尤其是神经网络60的对应的机器学习系统的示例性的训练装置140。训练装置140包括提供器71,该提供器例如提供输入图像x和目标输出参量ys,例如目标分类。输入图像x被输送给所要训练的人工神经网络60,该人工神经网络据此来确定输出参量y。输出参量y和目标输出参量ys被输送给比较器75,该比较器据此根据相应的输出参量y与目标输出参量ys的一致性来确定新的参数,这些新的参数被传送给参数存储器p并且在那里替代参数。
87.由训练系统140实施的方法可以以作为计算机程序来实现的方式寄存在机器可读存储介质147上并且由处理器148来实施。
88.当然,不必对全部图像进行分类。可能的是:利用检测算法例如将图像片段分类成对象,接着剪出这些图像片段,必要时产生新的图像片段并且将该新的图像片段在被剪出的图像片段的位置插入相关的图像中。
89.术语“计算机”包括用于运行可指定的计算规则的任意设备。这些计算规则可以以软件的形式存在,或者以硬件的形式存在,或者也可以以软件和硬件的混合形式存在。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
