1.本公开涉及机架驱动系统、马达控制系统、控制方法和控制程序。
背景技术:
2.在专利文献1中公开了一种控制装置,其基于来自检测移动体的两端附近的移动位置的一对位置检测器的检测信号来控制驱动移动体的两端附近的一对驱动单元。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2005-332191号公报。
技术实现要素:
6.发明所要解决的问题
7.本公开提供一种对简化设定作业有用的机架驱动系统和马达控制系统。
8.用于解决问题的手段
9.本公开的一个方面涉及的机架驱动系统,包括:第一马达,沿第一轴对驱动对象物进行驱动;第二马达,沿第二轴对驱动对象物进行驱动,第二轴与第一轴平行;以及马达控制系统,控制第一马达和第二马达。马达控制系统具有切换第一控制模式和第二控制模式的模式切换部,所述第一控制模式是缩小在第一轴和第二轴的轴间位置偏差,并且单独控制驱动对象物在各轴上的位置的模式,所述轴间位置偏差是驱动对象物在所述第一轴上的位置与驱动对象物在第二轴上的位置的偏差,所述第二控制模式是基于驱动对象物在第一轴和第二轴上的检测位置来控制驱动对象物的位置,并且控制驱动对象物的旋转状态的模式。马达控制系统按照由模式切换部切换的模式来控制所述第一马达和所述第二马达。
10.本公开的一个方面涉及的马达控制系统包括:控制部,控制第一马达和第二马达,所述第一马达沿第一轴对驱动对象物进行驱动,所述第二马达沿第二轴对驱动对象物进行驱动,所述第二轴与第一轴平行;以及模式切换部,切换第一控制模式和第二控制模式,所述第一控制模式是缩小第一轴和第二轴的轴间位置偏差并单独控制驱动对象物在各轴上的位置的模式,所述轴间位置偏差是驱动对象物在第一轴上的位置与驱动对象物在第二轴上的位置的偏差,所述第二控制模式是基于驱动对象物在第一轴和第二轴上的检测位置来控制驱动对象物的位置,并且控制驱动对象物的旋转状态的模式。控制部按照由模式切换部切换的模式来控制第一马达和第二马达。
11.发明效果
12.根据本公开,能够提供对简化设定作业有用的机架驱动系统、马达控制系统、控制方法以及控制程序。
附图说明
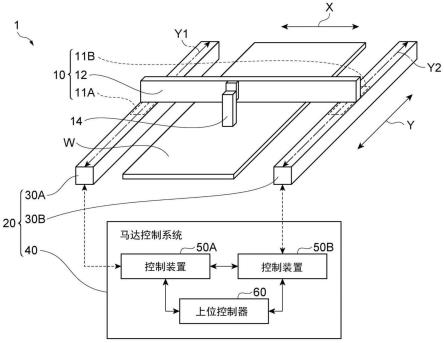
13.图1是表示机架驱动系统的一例的示意图。
14.图2是用于说明机架机构的运动方程式的示意图。
15.图3是表示马达控制系统的功能构成的一例的框图。
16.图4是表示轴间补偿控制模式中的控制内容的一例的图。
17.图5是表示分离控制模式中的控制内容的一例的图。
18.图6是表示马达控制系统的硬件构成的一例的框图。
19.图7是表示在轴间补偿控制模式下各控制装置执行的一系列处理的一例的流程图。
20.图8是表示一个控制装置在分离控制模式下执行的一系列处理的一例的流程图。
21.图9是表示另一个控制装置在分离控制模式中执行的一系列处理的一例的流程图。
22.图10是表示模式的切换方法的一例的流程图。
具体实施方式
23.以下,参照附图对一个实施方式进行说明。在说明中,对相同要素或具有相同功能的要素标注相同的符号,省略重复的说明。
24.图1示意性地示出了一个实施方式涉及的机架驱动系统。机架驱动系统1是用于自动执行规定作业的至少一部分的系统。作为利用机架驱动系统1进行的规定作业的具体例子,可以举出向基板安装半导体部件、向基板焊接半导体部件、涂布作业以及制造半导体或液晶。机架驱动系统1具有机架机构10、作业工具14和驱动系统20。
25.机架机构10是由驱动系统20驱动的对象物(驱动对象物)。机架机构10例如配置在工件w的上方,构成为在工件w的上方向规定的方向移动(行走)。机架机构10可以在一个方向上移动,也可以在彼此相交(例如,正交)的两个方向上移动。在图1中,示出了可在一个方向上移动的机架机构10。以下,将机架机构10移动的一个方向设为y轴方向,将与该y轴方向垂直的方向设为x轴方向。x轴方向和y轴方向可以分别是水平方向。
26.在机架机构10中,与移动方向正交的两端分别被驱动。通过对机架机构10的两端施加沿着相互平行的2轴(平行的2条线)的驱动力,机架机构10沿着y轴方向往复移动。以下,将上述平行的2轴(2条线)的一者称为“y1轴”,将另一者称为“y2轴”。机架机构10例如具有可动部11a、11b和机械结合部12。
27.可动部11a是通过沿y1轴施加的驱动力而在y1轴上可动的部分(滑块)。可动部11b是通过沿y2轴施加的驱动力而在y2轴上可动的部分(滑块)。机架机构10可以包括沿y1轴引导可动部11a的导轨等引导部件(未图示),也可以包括沿y2轴引导可动部11b的导轨等引导部件(未图示)。
28.机械结合部12是将y1轴和y2轴机械结合的部分。机械结合部12以沿x轴方向延伸的方式形成为棒状。机械结合部12的x轴方向的一端与可动部11a连接,机械结合部12的x轴方向的另一端与可动部11b连接。机械结合部12在x轴方向上的长度比作业对象的工件w在x轴方向上的长度长。机械结合部12的垂直于x轴方向的截面也可以是四边形(例如,长方形)。在机械结合部12的两端部分别经由可动部11a、11b沿着与y轴方向平行的线施加驱动力。
29.作业工具14是用于对工件w进行规定作业的工具。作业工具14也可以设置在机械
结合部12的x轴方向上的大致中央的侧面。与图1所示的示例不同,机架机构10可包括用于沿x轴方向驱动(往复移动)作业工具14的机构。用于沿x轴方向驱动作业工具14的机构可以设置在机械结合部12上。机架机构10也可以包括沿与x轴方向及y轴方向正交的方向驱动(往复移动)作业工具14的机构。
30.[机架驱动系统]
[0031]
驱动系统20是驱动机架机构10的系统。驱动系统20例如对机架机构10中的y1轴和y2轴分别施加驱动力,使机架机构10(的可动部分)沿y轴方向移动。驱动系统20包括马达30a、马达30b和马达控制系统40。
[0032]
(马达)
[0033]
马达30a(第一马达)沿着y1轴(第一轴)驱动机架机构10。马达30a构成为对机架机构10的机械结合部12的x轴方向上的一个端部施加驱动力。马达30a例如是线性马达,其大部分沿着y1轴延伸地形成。机械结合部12的一个端部的下表面经由可动部11a与马达30a连接。马达30a使可动部11a沿y1轴往复移动。在y1轴上,机械结合部12的一个端部的位置与可动部11a的位置相关。
[0034]
马达30b(第二马达)沿着y2轴(第二轴)驱动机架机构10。马达30b构成为对机架机构10的机械结合部12的x轴方向上的另一端部施加驱动力。马达30b例如是线性马达,其大部分沿着y2轴延伸地形成。机械结合部12的另一端部的下表面经由可动部11b与马达30b连接。马达30b使可动部11b沿y2轴往复移动。在y2轴上,机械结合部12的另一端部的位置与可动部11b的位置相关。
[0035]
马达30a及马达30b也可以是彼此同样构成的同种马达。马达30a和马达30b中的每一个可以包括产生驱动力的电动式驱动源和检测作为驱动对象的机械结合部12的端部在y轴方向上的位置的位置检测部。位置检测部例如是线性标度。马达30a及马达30b也可以是在绕旋转轴的旋转方向上产生驱动力的马达。在这种情况下,机架机构10可以包括将马达30a的旋转方向的能量转换为沿着y1轴的运动的机构(例如滚珠丝杠机构),也可以包括将由马达30b产生的旋转方向的能量转换为沿着y2轴的运动的机构。
[0036]
(马达控制系统)
[0037]
马达控制系统40是控制马达30a和马达30b的控制系统。马达控制系统40例如由多个计算机装置构成。马达控制系统40可以根据预定的动作程序来控制马达30a和马达30b。马达控制系统40构成为能够切换其控制模式(动作模式)。上述控制模式包括轴间补偿控制模式(第一控制模式)和分离控制模式(第二控制模式)。马达控制系统40根据所切换的控制模式来控制马达30a和马达30b。
[0038]
在轴间补偿控制模式中,马达控制系统40控制马达30a和马达30b,以在y1轴和y2轴中缩小轴间的位置偏差,并且单独控制机械结合部12在各轴上的位置(两端各自的位置)。轴间的位置偏差是指机械结合部12在y1轴上的检测位置与机械结合部12在y2轴上的检测位置之间的偏差,以下记为“轴间偏差δy”。马达控制系统40试图在相同的定时将机械结合部12的两端各自的位置移动到相同的目标位置。但是,由于马达30a、30b各自的个体差、以及马达30a、30b中包含的部件、线性标尺等位置检测部的组装精度等,可产生轴间偏差δy。
[0039]
马达控制系统40在单独控制机械结合部12在各轴上的位置时,控制马达30a使得
机械结合部12在y1轴上的检测位置接近目标位置,控制马达30b使得机械结合部12在y2轴上的检测位置接近目标位置。在各个位置控制中,进行用于缩小轴间偏差δy的补偿(修正)。
[0040]
在分离控制模式中,马达控制系统40基于机械结合部12在y1轴上的检测位置及在y2轴上的检测位置来控制马达30a及马达30b,以控制机械结合部12的位置并控制机械结合部12的旋转状态。分离控制模式与上述轴间补偿控制模式的不同之处在于,统一控制y1轴和y2轴上的驱动力(驱动量)。在分离控制模式中,马达控制系统40控制马达30a和马达30b,分离成机械结合部12在平移方向(y轴方向)上的位置和机械结合部12的旋转状态(旋转方向上的角度)。
[0041]
图2是用于说明机械结合部12的平移位置的控制和机械结合部12的旋转状态的控制的示意图。在图2中,“cg”表示x-y平面上的机械结合部12的重心,“l1”表示重心cg与被施加来自马达30a的驱动力f1的位置之间的距离,“l2”表示重心cg与被施加来自马达30b的驱动力f2的位置之间的距离。将机械结合部12的重量设为“m”,将围绕垂直于x-y平面且经过重心cg的轴线在机械结合部12产生的惯量设为“jz”时,重心cg的运动方程式由以下的式(1)及式(2)表示。
[0042]
[式1]
[0043][0044]
[式2]
[0045][0046]
式(1)是关于机械结合部12的平移方向的运动方程式,式(2)是关于机械结合部12的旋转方向的运动方程式。在式(1)中,“yg”通过下述的式(3)计算,表示重心cg在y轴方向上的位置。在式(3)中,“y1”是从马达30a得到的机械结合部12在y1轴上的检测位置,“y2”是从马达30b得到的机械结合部12在y2轴上的检测位置。
[0047]
[式3]
[0048][0049]
在式(2)中,“θ”表示机械结合部12的绕重心cg的旋转角度,通过式(4)计算。旋转角度θ的基准是沿x轴方向延伸的线。即,当检测位置y1的值和检测位置y2的值彼此一致时,旋转角度θ为零。在y1轴和y2轴中,虽然可能产生检测位置的偏移,但由于机械地连结,所以旋转角度θ的值小的情况多。因此,式(4)能够如下述式(5)那样近似。
[0050]
[式4]
[0051][0052]
[式5]
[0053]
[0054]
马达控制系统40也可以在分离控制模式下控制马达30a和马达30b,使得式(3)所示的位置yg追随目标位置,并且控制马达30a和马达30b,使得式(5)所示的旋转角度θ接近于零。关于上述的轴间补偿控制模式和分离控制模式的详细情况在后面叙述。
[0055]
返回到图1,马达控制系统40可以具有控制装置50a、控制装置50b和上位控制器60。控制装置50a(第一控制装置)与马达30a连接。控制装置50a能够调节马达30a对机械结合部12的驱动力(驱动量)。控制装置50b(第二控制装置)与马达30b连接。控制装置50b能够调节马达30b对机械结合部12的驱动力(驱动量)。控制装置50a、50b也分别称为放大器或伺服放大器。
[0056]
控制装置50a和控制装置50b彼此可通信地连接。控制装置50a及控制装置50b构成控制马达30a及马达30b的控制部。控制装置50a及控制装置50b同步地控制马达30a及马达30b。控制装置50a及控制装置50b控制马达30a及马达30b,使得机架机构10的机械结合部12追随目标位置。控制装置50a及控制装置50b控制马达30a及马达30b,使得每隔规定的周期,机械结合部12接近目标位置,且轴间偏差δy缩小。根据马达控制系统40的控制模式,控制装置50a和控制装置50b的协作方法、及对各马达的控制方法不同。
[0057]
上位控制器60是与控制装置50a及控制装置50b分别可通信地连接的上位装置。上位控制器60将表示作为驱动对象物的机架机构10的目标位置的位置指令输出到控制装置50a及控制装置50b的两者、或控制装置50a及控制装置50b的至少一者。在对控制装置50a以及控制装置50b两者输出位置指令的情况下,上位控制器60在相同的定时(相同的周期)将表示相同的目标位置的位置指令分别输出到控制装置50a以及控制装置50b。
[0058]
控制装置50a、控制装置50b以及上位控制器60例如彼此分体地构成。在上述轴间补偿控制模式中,控制装置50a基于y1轴上的检测位置y1生成对马达30a的指令,控制装置50b基于y2轴上的检测位置y2生成对马达30b的指令。另外,在上述轴间补偿控制模式中,控制装置50a及控制装置50b至少一个基于上述轴间偏差δy生成(运算)对马达30a及马达30b的指令的补偿值。例如,控制装置50a基于轴间偏差δy生成对马达30a的指令的补偿值,控制装置50b基于轴间偏差δy生成对马达30b的指令的补偿值。
[0059]
在上述分离控制模式中,控制装置50a基于检测位置y1和检测位置y2生成对马达30a和马达30b的指令,控制装置50b基于轴间偏差δy生成对马达30a和马达30b的指令。以下,对控制装置50a、控制装置50b及上位控制器60各自的一个例子进行详细说明。
[0060]
控制装置50a基于来自上位控制器60的位置指令来调节从马达30a向机械结合部12的驱动量。如图3所示,控制装置50a作为功能上的构成(以下称为“功能模块”)例如具有模式切换部71、位置获取部72、单独控制部74和协作控制部76。由这些功能模块执行的处理相当于由控制装置50a执行的处理。
[0061]
模式切换部71对上述轴间补偿控制模式和上述分离控制模式进行切换。模式切换部71针对控制装置50a动作模式选择轴间补偿控制模式和分离控制模式中的某一种。控制装置50a按照由模式切换部71切换(选择)的控制模式来调节从马达30a向机械结合部12的驱动力。模式切换部71例如基于来自上位控制器60的表示控制模式的指令,切换为某一种的控制模式。
[0062]
产生的轴间偏差δy(扭转)的大小以及能够允许的控制增益的大小根据机架机构10的刚性而发生变化。机架机构10的刚性是指机架机构10整体(可动的部分整体)的位置变
化的难度(容易度)的程度。当机架机构10的刚性高时,机架机构10的y1轴和y2轴各自的位置难以变化,当机架机构10的刚性低时,机架机构10的y1轴和y2轴各自的位置容易变化。可以考虑,基于机架机构10的刚性来确定在哪种控制模式下执行控制是合适的。模式切换部71也可以基于表示机架机构10的刚性程度的评价值,来切换轴间补偿控制模式和分离控制模式。
[0063]
在一个例子中,模式切换部71在上述评价值超过规定的阈值的情况下切换(选择)为轴间补偿控制模式,在上述评价值低于该阈值的情况下切换(选择)为分离控制模式。上述阈值例如预先存储在马达控制系统40中,在验证了过去得到的上述评价值和各控制模式下1的执行结果之间的关系的基础上确定。
[0064]
位置获取部72从马达30a获取表示机械结合部12在y1轴上的检测位置y1的信息。位置获取部72也可以每隔规定的周期从马达30a的位置检测部获取检测位置y1的值。位置获取部72获取表示机械结合部12在y2轴上的检测位置y2的信息。位置获取部72也可以每隔规定的周期从控制装置50b获取检测位置y2的值。
[0065]
单独控制部74(第一单独控制部)在通过模式切换部71切换为轴间补偿控制模式的情况下,基于y1轴上的检测位置y1以及轴间偏差δy来生成对马达30a的转矩指令tca(第一指令)。单独控制部74获取表示机械结合部12的y轴方向上的目标位置的位置指令yt,以缩小检测位置y1与位置指令yt(目标位置)之间的偏差、从而缩小轴间偏差δy的方式生成上述转矩指令tca。
[0066]
单独控制部74基于对马达30a的转矩指令tca使马达30a动作。单独控制部74也可以每隔规定的周期执行生成转矩指令tca、和基于该转矩指令tca使马达30a动作。“基于转矩指令tca使马达30a动作”是指调节对马达30a的驱动电力(例如,驱动电流)的值,使得将与转矩指令tca对应的驱动力施加到机械结合部12的y1轴。
[0067]
协作控制部76(第一协作控制部)在通过模式切换部71切换为分离控制模式的情况下,基于y1轴上的检测位置y1及y2轴上的检测位置y2,来生成对马达30a及马达30b两者的平移推力指令。平移推力指令是用于控制机械结合部12在y轴方向上的位置(例如,重心cg在y轴方向上的位置)的指令。
[0068]
协作控制部76也可以获取表示机械结合部12在y轴方向上的目标位置的位置指令yt,以缩小检测位置y1和检测位置y2的平均值(上述位置yg)与位置指令yt之间的偏差的方式生成平移推力指令。协作控制部76向控制装置50b输出上述平移推力指令,基于平移推力指令和从控制装置50b得到的旋转转矩指令使马达30a动作。从控制装置50b得到的旋转转矩指令的详细情况在后面叙述。
[0069]
协作控制部76基于平移推力指令和旋转转矩指令来生成对马达30a的合成转矩指令tc1。协作控制部76调节对马达30a的驱动电力(例如驱动电流)的值,以将与合成转矩指令tc1对应的驱动力施加给机械结合部12的y1轴。协作控制部76也可以每隔规定的周期执行生成并输出平移推力指令、和基于在前一个周期生成的平移推力指令和旋转转矩指令使马达30a动作。如上所述,在轴间补偿控制模式和分离控制模式之间,对马达30a的转矩指令的生成方法(运算方法)不同。
[0070]
控制装置50b与控制装置50a同步,基于来自上位控制器60的位置指令yt来调节从马达30b向机械结合部12的驱动量。控制装置50b作为功能模块例如具有模式切换部81、位
置获取部82、单独控制部84和协作控制部86。由这些功能模块执行的处理相当于由控制装置50b执行的处理。
[0071]
模式切换部81在上述轴间补偿控制模式和上述分离控制模式之间切换。模式切换部81针对控制装置50b的动作模式选择轴间补偿控制模式和分离控制模式中的任一者。控制装置50b按照由模式切换部81切换的(选择的)控制模式来调节从马达30b对机械结合部12的驱动量。控制装置50b例如基于来自上位控制器60的表示控制模式的指令切换为某一种控制模式。控制装置50b也可以基于来自控制装置50a(模式切换部71)的信息切换为与由控制装置50a设定的控制模式相同的模式。
[0072]
位置获取部82从马达30b获取表示机械结合部12在y2轴上的检测位置y2的信息。位置获取部82也可以每隔规定的周期从马达30b的位置检测部获取检测位置y2的值。位置获取部82获取表示机械结合部12在y1轴上的检测位置y1的信息。位置获取部82也可以每隔规定的周期从控制装置50a获取检测位置y1的值。
[0073]
单独控制部84(第二单独控制部)在通过模式切换部81切换为轴间补偿控制模式的情况下,基于y2轴上的检测位置y2以及轴间偏差δy来生成对马达30b的转矩指令tcb(第二指令)。单独控制部84获取表示机械结合部12在y轴方向上的目标位置的位置指令yt,生成上述转矩指令tcb,使得检测位置y2与位置指令yt(目标位置)之间的偏差缩小、轴间偏差δy缩小。
[0074]
单独控制部84基于对马达30b的转矩指令tcb使马达30b动作。单独控制部84也可以每隔规定的周期执行生成转矩指令tcb的指令和基于该转矩指令tcb使马达30b动作。单独控制部84调节对马达30b的驱动电力(例如驱动电流)的值,使得与转矩指令tcb对应的驱动力被施加给机械结合部12的y2轴。
[0075]
协作控制部86(第二协作控制部)在通过模式切换部81切换为分离控制模式的情况下,基于轴间偏差δy生成对马达30a及马达30b两者的旋转转矩指令。旋转转矩指令是用于控制机械结合部12的旋转状态的指令。协作控制部86生成旋转转矩指令,以缩小轴间偏差δy。轴间偏差δy缩小,由此上述旋转角度θ接近于零。与控制装置50a的协作控制部76不同,协作控制部86不获取表示目标位置的位置指令yt。
[0076]
协作控制部86向控制装置50a输出上述旋转转矩指令,基于旋转转矩指令和从控制装置50a(协作控制部76)得到的平移推力指令使马达30b动作。协作控制部86基于平移推力指令和旋转转矩指令来生成对马达30b的合成转矩指令tc2。协作控制部86调节对马达30b的驱动电力(例如,驱动电流)的值,以将与合成转矩指令tc2对应的驱动力施加给机械结合部12的y2轴。
[0077]
协作控制部86也可以每隔规定的周期执行生成并输出旋转转矩指令、和基于在前一个周期生成的旋转转矩指令和平移推力指令使马达30b动作。如上所述,在轴间补偿控制模式和分离控制模式之间,对马达30b的转矩指令的生成方法(运算方法)不同。
[0078]
在两种控制模式的任一种中,控制装置50a进行对马达30a的驱动电力的调节及输出,控制装置50b进行对马达30b的驱动电力的调节及输出。在轴间补偿控制模式中,控制装置50a进行y1轴上的位置控制,控制装置50b进行y2轴上的位置控制。在控制装置50a和控制装置50b进行的位置控制中,分别考虑用于缩小轴间偏差δy的补偿值。
[0079]
图4表示切换到轴间补偿控制模式时的数据的输入输出关系的一例。在控制装置
50a中,对位置获取部72输入来自马达30a的检测位置y1和来自马达30b的检测位置y2。位置获取部72根据检测位置y1和检测位置y2运算轴间偏差δy(=y1-y2)。对单独控制部74输入位置指令yt和检测位置y1。单独控制部74基于位置指令yt和检测位置y1执行用于使机械结合部12在y1轴上的位置追随位置指令yt的位置速度控制。
[0080]
单独控制部74例如在位置速度控制中,计算位置指令yt和检测位置y1之间的位置偏差,基于该位置偏差(例如通过比例运算)生成速度指令。然后,单独控制部74计算所生成的速度指令与从检测位置y1得到的速度检测值之间的速度偏差,并基于该速度偏差(例如通过比例积分运算)生成推力指令fca。
[0081]
轴间偏差δy也被输入到单独控制部74。单独控制部74计算推力指令的补偿值co(修正值),使得轴间偏差δy缩小。单独控制部74通过对基于速度偏差运计算的推力指令fca和补偿值co实施按照规定的滤波条件的运算来生成上述转矩指令tca。单独控制部74向马达30a输出与转矩指令tca对应的驱动电流ia,使马达30a动作。由此,与转矩指令tca对应的驱动力被施加到机械结合部12的y1轴。
[0082]
在控制装置50b中,对位置获取部82输入来自马达30b的检测位置y2和来自马达30a的检测位置y1。位置获取部82根据检测位置y1和检测位置y2运算轴间偏差δy。对单独控制部84输入与单独控制部74获取的指令相同的位置指令yt和检测位置y2。单独控制部84基于位置指令yt和检测位置y2执行用于使机械结合部12在y2轴上的位置追随位置指令yt的位置速度控制。
[0083]
单独控制部84例如在位置速度控制中,计算位置指令yt和检测位置y2之间的位置偏差,并基于该位置偏差(例如通过比例运算)生成速度指令。然后,单独控制部84计算所生成的速度指令与从检测位置y2得到的速度检测值之间的速度偏差,并基于该速度偏差(例如通过比例积分运算)生成推力指令fcb。
[0084]
轴间偏差δy也被输入到单独控制部84。单独控制部84计算推力指令的补偿值co(修正值),使得轴间偏差δy缩小。计算的该补偿值co是与由单独控制部74计算的补偿值co相同的值。单独控制部84通过对基于速度偏差运计算的推力指令fcb和补偿值co实施按照规定的滤波条件的运算来生成上述转矩指令tcb。如图4所示的例子那样,控制装置50a的单独控制部74和控制装置50b的单独控制部84这两者也可以计算推力指令的补偿值co,与该例子不同,也可以单独控制部74和单独控制部84的任一个计算推力指令的补偿值co。
[0085]
在转矩指令tca与转矩指令tcb之间,补偿值co的值相同,但也可以以补偿值co的符号相互反转的方式设定上述滤波条件。单独控制部84向马达30b输出与转矩指令tcb对应的驱动电流ib,使马达30b动作。由此,与转矩指令tcb对应的驱动力被施加到机械结合部12的y2轴。
[0086]
另一方面,在分离控制模式中,控制装置50a生成上述平移推力指令,控制装置50a及控制装置50b基于平移推力指令分别调节向对应的马达的驱动电力,因此控制装置50a(实质上)控制机械结合部12在y轴方向上的位置。在分离控制模式中,控制装置50b生成上述旋转转矩指令,控制装置50a及控制装置50b基于旋转转矩指令分别调节向对应的马达的驱动电力,因此控制装置50b(实质上)控制机械结合部12的旋转角度θ。
[0087]
图5表示切换为分离控制模式时的数据的输入输出关系的一例。对控制装置50a的位置获取部72输入来自马达30a的检测位置y1和来自马达30b的检测位置y2。位置获取部72
根据检测位置y1和检测位置y2,运算机械结合部12的重心cg在y轴方向上的位置yg[=(y1 y2)/2]。对协作控制部76输入位置指令yt和位置yg。协作控制部76基于位置指令yt和位置yg执行用于使机械结合部12的重心位置追随位置指令yt的位置速度控制。
[0088]
协作控制部76在位置速度控制中,计算位置指令yt和位置yg之间的平移偏差,基于该平移偏差(例如通过比例运算)生成速度指令。然后,协作控制部76计算所生成的速度指令与根据位置yg得到的速度检测值之间的速度偏差,并基于该速度偏差(例如通过比例积分运算)生成表示y轴方向上的推力指令的平移推力指令trc。协作控制部76将平移推力指令trc乘以1/2后的值输出到控制装置50b的协作控制部86。
[0089]
对控制装置50b的位置获取部82输入来自马达30b的检测位置y2和来自马达30a的检测位置y1。位置获取部82根据检测位置y1和检测位置y2运算轴间偏差δy。对协作控制部86输入轴间偏差δy。协作控制部86基于轴间偏差δy,来执行用于使机械结合部12绕通过机械结合部12的重心的铅垂的轴线的旋转角度θ追随零的位置速度控制。
[0090]
协作控制部86在位置速度控制中,根据轴间偏差δy基于式(5)计算旋转角度θ。协作控制部86基于旋转角度θ的值(例如通过比例运算)生成旋转方向上的速度指令。并且,协作控制部86计算所生成的速度指令与根据旋转角度θ得到的旋转方向上的速度检测值之间的速度偏差,并基于该速度偏差(例如通过比例积分运算)生成表示旋转方向上的推力指令的旋转转矩指令roc。协作控制部86向控制装置50a的协作控制部76输出旋转转矩指令roc的值。
[0091]
协作控制部76通过对平移推力指令trc的一半的值和旋转转矩指令roc实施按照规定的滤波条件的运算来生成上述合成转矩指令tc1。协作控制部76向马达30a输出与合成转矩指令tc1对应的驱动电流ia,使马达30a动作。由此,对机械结合部12的y1轴施加与合成转矩指令tc1对应的驱动力。
[0092]
协作控制部86通过对平移推力指令trc的一半的值和旋转转矩指令roc实施按照规定的滤波条件的运算来生成上述合成转矩指令tc2。在合成转矩指令tc1的生成和合成转矩指令tc2的生成中,也可使得得旋转转矩指令roc的符号反转的方式确定上述滤波条件。协作控制部86向马达30b输出与合成转矩指令tc2对应的驱动电流ib,使马达30b动作。由此,对机械结合部12的y2轴施加与合成转矩指令tc2对应的驱动力。
[0093]
如图3所示,上位控制器60作为功能模块,例如具有位置指令输出部62、测试控制部64、以及刚性评价部66。由这些功能模块执行的处理相当于由上位控制器60执行的处理。
[0094]
位置指令输出部62将表示机械结合部12在y轴方向上的目标位置的位置指令yt分别输出到控制装置50a及控制装置50b,或者不向控制装置50b输出位置指令yt而输出到控制装置50a。位置指令输出部62也可以每隔规定的周期分别向控制装置50a和控制装置50b、或者向控制装置50a输出位置指令yt。位置指令输出部62也可以按照预先确定的动作程序,按每个周期分别向控制装置50a和控制装置50b、或者向控制装置50a输出位置指令。位置指令输出部62也可以根据来自其他系统的指令等,按每个周期向控制装置50a及控制装置50b这两者、或向控制装置50a输出位置指令yt。
[0095]
测试控制部64为了得到切换控制模式时的指标,执行初始设定控制。测试控制部64在初始设定控制中,使控制装置50a及控制装置50b执行以下的动作。在初始设定控制中,例如,控制装置50a控制马达30a使得检测位置y1追随测试用的目标位置(测试目标位置),
控制装置50b控制马达30b使得检测位置y2追随测试用的目标位置。在初始设定控制中,不进行用于缩小轴间偏差δy的补偿。
[0096]
测试控制部64也可以在规定的设定期间使控制装置50a和控制装置50b执行初始设定控制。测试用的目标位置也可以在设定期间内变动。测试控制部64在执行初始设定控制的期间,按每个周期蓄积(存储)轴间偏差δy、第一推力指令及第二推力指令。第一推力指令是由控制装置50a进行运算使得检测位置y1接近测试用的目标位置的指令,与上述推力指令fca同样地进行运算而得到。第二推力指令是由控制装置50b进行运算使得检测位置y2接近测试用的目标位置的指令,与上述推力指令fcb同样地进行运算而得到。
[0097]
刚性评价部66基于在执行初始设定控制的期间得到的轴间偏差δy和得到该轴间偏差δy时的对马达30a及马达30b各自的推力指令之差,计算表示机架机构10的刚性程度的评价值(指标)。刚性评价部66也可以通过将轴间偏差δy除以上述第一推力指令与上述第二推力指令之差来计算上述评价值。
[0098]
刚性评价部66也可以按每个周期将一个周期中的轴间偏差δy除以该周期中的第一推力指令及第二推力指令的差。刚性评价部66也可以将在多个周期中分别将轴间偏差δy除以推力指令的差而得到的值的平均值作为上述评价值来计算。上述的模式切换部71和模式切换部81也可以基于刚性评价部66的评价值来切换控制模式。另外,控制装置50a及控制装置50b的至少一者也可以具有刚性评价部66。
[0099]
如图6所示,控制装置50a包括电路170。电路170包括至少一个处理器171、内存172、存储器173、输入输出端口175、驱动器176和通信端口178。存储器173是可由计算机读取的非易失性存储介质(例如闪存)。存储器173存储有用于与控制装置50b协作地控制马达30a的程序以及数据。内存172临时存储从存储器173加载的程序、处理器171的运算结果等。
[0100]
处理器171通过与内存172协作执行上述程序,构成控制装置50a的上述功能模块。输入输出端口175根据来自处理器171的指令,在与马达30a(例如马达30a的位置检测部)之间进行电信号的输入输出。驱动器176根据来自处理器171的指令向马达30a输出驱动电力(驱动电流)。通信端口178根据来自处理器171的指令,在与上位控制器60之间以及与控制装置50b之间,经由无线、有线或者网络线路进行通信。
[0101]
控制装置50b包括电路180。电路180包括至少一个处理器181、内存182、存储器183、输入输出端口185、驱动器186和通信端口188。存储器183是可由计算机读取的非易失性存储介质(例如闪存)。存储器183存储用于与控制装置50a协作地控制马达30b的程序以及数据。内存182临时存储从存储器183加载的程序、处理器181的运算结果等。
[0102]
处理器181通过与内存182协作执行上述程序,来构成控制装置50b的上述功能模块。输入输出端口185根据来自处理器181的指令,在与马达30b(例如马达30b的位置检测部)之间进行电信号的输入输出。驱动器186根据来自处理器181的指令向马达30b输出驱动电力(驱动电流)。通信端口188根据来自处理器181的指令,在与上位控制器60之间以及与控制装置50a之间,经由无线、有线或者网络线路进行通信。
[0103]
上位控制器60具备电路160。电路160包括至少一个处理器161、内存162、存储器163和通信端口168。存储器163是可由计算机读取的非易失性存储介质(例如闪存)。存储器163存储用于经由控制装置50a及控制装置50b控制马达30a及马达30b的程序及数据。内存162临时存储从存储器163加载的程序、处理器161的运算结果等。
[0104]
处理器161通过与内存162协作执行上述程序,来构成上位控制器60的上述功能模块。通信端口168根据来自处理器161的指令,经由无线、有线或者网络线路在与控制装置50a之间以及与控制装置50b之间进行通信。控制装置50a、控制装置50b以及上位控制器60各自具备的电路不一定限于通过程序构成各功能的电路。任何电路可以由专用逻辑电路或集成有专用逻辑电路的专用集成电路(application specific integrated circuit)构成至少一部分功能。
[0105]
[控制方法]
[0106]
接着,关于马达控制系统40执行的对马达30a及马达30b的控制方法(控制方法),说明其一例。该控制方法至少包括:控制马达30a和马达30b;以及切换轴间补偿控制模式和分离控制模式。控制马达30a和马达30b包括根据切换的模式控制马达30a和马达30b。
[0107]
图7表示在一个周期中切换为轴间补偿控制模式的情况下马达控制系统40执行的一系列处理的一例。以下,依次说明在轴间补偿控制模式下分别对马达30a及马达30b进行的单独控制。在选择了轴间补偿控制模式的情况下,马达控制系统40以规定的周期重复下述步骤s11~s16的一系列处理。在此,当前的周期用“k”(k是1以上的整数)表示,将在第k次的周期得到的值以及指令分别表示为“y(k)”以及“指令(k)”。
[0108]
在对马达30a的控制中,马达控制系统40最初执行步骤s11。在步骤s11中,例如,控制装置50a的单独控制部74从上位控制器60的位置指令输出部62获取位置指令yt(k)。位置指令yt(k)的值可以是与在上次的周期中得到的位置指令yt(k-1)相同的值,也可以是不同的值。
[0109]
接着,马达控制系统40执行步骤s12。在步骤s12中,例如,控制装置50a的位置获取部72从马达30a获取检测位置y1(k),从控制装置50b获取检测位置y2。由于从控制装置50b到控制装置50a的通信所需的时间,从控制装置50b获得的检测位置y2可以是在当前周期的前一个周期中由控制装置50b的位置获取部82获取的值(检测位置y2(k-1))。位置获取部72也可以将在前一个周期的步骤s12中获取的检测位置y1(k-1)与在步骤s12中得到的检测位置y2(k-1)的差作为轴间偏差δy(k-1)进行运算。
[0110]
接着,马达控制系统40执行步骤s13、s14。在步骤s13中,例如,单独控制部74计算在步骤s11中得到的位置指令yt(k)和在步骤s12中得到的检测位置y1(k)的位置偏差。另外,单独控制部74也可以计算在步骤s11中得到的位置指令yt(k)和在前一个周期的步骤s12中得到的检测位置y1(k-1)的位置偏差。然后,单独控制部74基于计算的位置偏差生成推力指令fca,使得检测位置y1接近位置指令yt。在步骤s14中,例如,单独控制部74基于在步骤s12中得到的轴间偏差δy(k-1)来计算推力指令的补偿值co,使得轴间偏差δy接近于零。
[0111]
接着,马达控制系统40执行步骤s15、s16。在步骤s15中,例如,单独控制部74按照规定的滤波条件,利用在步骤s14中得到的补偿值对在步骤s13中得到的推力指令进行修正,由此生成转矩指令tca。在步骤s16中,例如,单独控制部74向马达30a输出与在步骤s15中得到的转矩指令tca对应的驱动电力(驱动电流)。马达控制系统40通过重复以上的步骤s11~s16,来缩小轴间偏差δy,并且使得机械结合部12在y1轴上的检测位置y1追随位置指令yt。
[0112]
在选择了轴间补偿控制模式的情况下,马达控制系统40以规定的周期重复下述步
骤s21~s26的一系列处理。步骤s21~s26除了控制对象是马达30b这一点以外,与上述步骤s11~s16同样地执行。马达控制系统40首先执行步骤s21。在步骤s21中,例如,控制装置50b的单独控制部84从上位控制器60的位置指令输出部62获取位置指令yt(k)。
[0113]
接着,马达控制系统40执行步骤s22。在步骤s22中,例如,控制装置50b的位置获取部82从马达30b获取检测位置y2(k),从控制装置50a获取检测位置y1(k-1)。位置获取部82也可以运算在步骤s22中得到的检测位置y1(k-1)和在前一个周期的步骤s22中获取的检测位置y2(k-1)的差作为轴间偏差δy(k-1)。
[0114]
接着,马达控制系统40执行步骤s23、s24。在步骤s23中,例如,单独控制部84计算在步骤s21中得到的位置指令yt与在该周期的步骤s22中得到的检测位置y2(k)或前一个周期的步骤s22中得到的检测位置y2(k-1)的位置偏差。然后,单独控制部84基于计算的位置偏差生成推力指令fcb,使得检测位置y2接近位置指令yt。在步骤s24中,例如,单独控制部84基于在步骤s22中得到的轴间偏差δy(k-1)计算推力指令的补偿值co,使得轴间偏差δy接近于零。
[0115]
接着,马达控制系统40执行步骤s25、s26。在步骤s25中,例如,单独控制部84按照规定的滤波条件,利用在步骤s24中得到的补偿值co对在步骤s23中得到的推力指令fcb进行修正,由此生成转矩指令tcb。在步骤s26中,例如,单独控制部84向马达30b输出与在步骤s25中得到的转矩tcb对应的驱动电力(驱动电流)。马达控制系统40通过重复以上的步骤s21~s26,来缩小轴间偏差δy,并且使得机械结合部12在y2轴上的检测位置y2追随位置指令yt。
[0116]
图8示出了马达控制系统40在切换到分离控制模式的情况下在一个周期中关于平移方向上的控制执行的一系列处理的示例。在平移方向控制中,马达控制系统40首先执行步骤s31。在步骤s31中,例如,控制装置50a的协作控制部76从上位控制器60的位置指令输出部62获取位置指令yt(k)。
[0117]
接着,马达控制系统40执行步骤s32。在步骤s32中,例如,控制装置50a的位置获取部72从马达30a获取检测位置y1(k),从控制装置50b获取检测位置y2(k-1)。位置获取部72可以计算检测位置y1(k-1)和检测位置y2(k-1)的平均值作为机械结合部12的重心cg处的位置yg(k-1)。
[0118]
接着,马达控制系统40执行步骤s33。在步骤s33中,例如,控制装置50a的协作控制部76计算上述位置yg(k-1)与位置指令y(k)的偏差,基于该偏差生成平移推力指令trc(k),使得位置yg接近位置指令yt。然后,协作控制部76在将生成的平移推力指令trc(k)的值减半后,将其一半的值输出到控制装置50b的协作控制部86。
[0119]
接着,马达控制系统40执行步骤s34。在步骤s34中,例如,协作控制部76从控制装置50b的协作控制部86获取旋转转矩指令。由于从控制装置50b至控制装置50a的通信所需的时间的原因,在步骤s34中获取的旋转转矩指令也可以是在前一个周期中由协作控制部86生成的旋转转矩指令roc(k-1)。
[0120]
接着,马达控制系统40执行步骤s35、s36。在步骤s35中,例如,协作控制部76基于在前一个周期的步骤s33中生成的平移推力指令trc(k-1)的一半的值和在步骤s34中获取的旋转转矩指令roc(k-1)生成合成转矩指令tc1。平移推力指令trc(k-1)的一半的值与旋转转矩指令roc(k-1)的合成按照规定的滤波条件执行。在步骤s36中,例如,协作控制部76
向马达30a输出与在步骤s35中得到的合成转矩指令tc1对应的驱动电力(驱动电流)。
[0121]
图9表示在切换到分离控制模式的情况下在一个周期中马达控制系统40关于旋转方向上的控制执行的一系列处理的一例。在旋转方向的控制中,马达控制系统40首先执行步骤s42。在步骤s42中,例如,控制装置50b的位置获取部82从马达30b获取检测位置y2(k),从控制装置50a获取检测位置y1(k-1)。位置获取部72计算检测位置y1(k-1)和检测位置y2(k-1)之差作为轴间偏差δy(k-1)。
[0122]
接着,马达控制系统40执行步骤s43。在步骤s43中,例如,控制装置50b的协作控制部86基于在步骤s42中计算的轴间偏差δy(k-1)生成旋转转矩指令roc(k),以缩小轴间偏差δy。然后,协作控制部86将所生成的旋转转矩指令roc(k)输出到控制装置50a的协作控制部76。
[0123]
接着,马达控制系统40执行步骤s44。在步骤s44中,例如,协作控制部86从控制装置50a的协作控制部76获取平移推力指令trc的一半的值。由于从控制装置50a到控制装置50b的通信所需的时间的原因,在步骤s44中获取的平移推力指令的一半的值也可以是在前一个周期中由协作控制部76生成的平移推力指令trc(k-1)的一半的值。
[0124]
接着,马达控制系统40执行步骤s45、s46。在步骤s45中,例如,协作控制部86基于在前一个周期的步骤s43中生成的旋转转矩指令roc(k-1)、和在步骤s44中获取的平移推力指令trc(k-1)的一半的值来生成合成转矩指令tc2。旋转转矩指令roc(k-1)和平移推力指令trc(k-1)的一半的值的合成按照规定的滤波条件执行。在步骤s46中,例如,协作控制部86向马达30b输出与在步骤s45中得到的合成转矩指令tc2对应的驱动电力(驱动电流)。
[0125]
马达控制系统40通过重复以上的步骤s31~s36以及步骤s42~s46,来缩小轴间偏差δy,并且使得机械结合部12的重心cg处的位置yg追随位置指令yt。在上述例子中,基于在前一个周期中生成的旋转转矩指令roc(k-1)和平移推力指令trc(k-1)调节对各马达的驱动电力。由于旋转转矩指令及平移推力指令基于在前一个周期得到的检测位置y1(k-1)及检测位置y2(k-1),所以在当前周期中,基于在前两个周期得到的检测位置y1、y2调节对各马达的驱动电力。
[0126]
图10是表示在上述的初始设定控制中由马达控制系统40执行的一系列处理的一例的流程图。初始设定控制是为了在进行机架驱动系统1对工件w的实际作业(在制造阶段的作业)之前的准备阶段中进行马达控制系统40的设定而执行的。在该初始设定控制中,例如,上位控制器60的测试控制部64使控制装置50a执行下述步骤s71~s76,使控制装置50b与步骤s71~s76同步地执行下述步骤s81~s86。
[0127]
步骤s71~s76和步骤s81~s86除了控制对象的马达不同这一点以外,同样地被执行,因此以下说明步骤s71~s76,省略步骤s81~s86的详细说明。控制装置50a重复步骤s71~s76,直到满足规定的条件。在步骤s71中,例如,控制装置50a从上位控制器60获取测试用的位置指令yt0(测试用的目标位置)。
[0128]
在步骤s72中,例如,控制装置50a从马达30a获取检测位置y1。在步骤s73中,例如,控制装置50a计算在步骤s71中获取的位置指令yt0与在步骤s72中获取的检测位置y1的位置偏差。在步骤s74中,例如,控制装置50a基于在步骤s73中计算的位置偏差生成推力指令以缩小该偏差。在步骤s75中,例如,控制装置50a根据在步骤s74中生成的推力指令调节对马达30a的驱动电力。在步骤s76中,例如,控制装置50a将在步骤s72中获取的检测位置y1和
在步骤s74中生成的推力指令输出到上位控制器60。上位控制器60在与表示该周期的信息建立对应后,存储检测位置y1以及推力指令。
[0129]
在执行各周期的步骤s76、s86之后,马达控制系统40执行步骤s91。在步骤s91中,例如,测试控制部64判定从开始最初的步骤s71、s81起是否经过了规定的设定时间。规定的设定时间例如设定为蓄积数据的时间,直到能够评价机架机构10的刚性的程度。在步骤s91中,在判断为没有经过规定的设定时间的情况下(步骤s91:否),控制装置50a再次执行步骤s71~s76,控制装置50b再次执行步骤s81~s86。
[0130]
在步骤s91中,在判断为经过了规定的设定时间的情况下(步骤s91:是),马达控制系统40执行步骤s92。在步骤s92中,例如,刚性评价部66基于通过重复步骤s76、s86而蓄积的数据来计算表示机架机构10的刚性程度的评价值。刚性评价部66也可以按每个周期将在步骤s72、s82中得到的检测位置彼此的差(轴间偏差δy)除以在步骤s74、s84中得到的推力指令彼此的差。并且,刚性评价部66也可以获取除法运算后的值的平均值、最小值、最大值或最频值等统计值作为评价值。
[0131]
接着,马达控制系统40执行步骤s93。在步骤s93中,例如,模式切换部71基于在步骤s92中获取的评价值将执行的控制模式切换为轴间补偿控制模式或分离控制模式中的某一种。模式切换部81也可以通过获取模式切换部71的切换结果,将执行的控制模式切换为轴间补偿控制模式或分离控制模式中的某一种。由此,准备阶段的设定结束,以后,在实际的制造阶段,马达控制系统40按照切换后的控制模式控制马达30a及马达30b。
[0132]
(变形例)
[0133]
在图7~图10中分别说明的一系列的处理是一个例子,可以适当变更。在某一个的一系列的处理中,马达控制系统40可以并行执行一个步骤和下一个步骤,也可以以与上述例子不同的顺序执行各步骤。马达控制系统40可以省略某一个步骤,并且可以在某一个步骤中执行与上述示例不同的处理。
[0134]
通过上述初始设定控制以外的方法,马达控制系统40也可以获取表示机架机构10的刚性程度的评价值。马达控制系统40例如可以从该装置获取由其他装置评价的上述评价值,也可以通过表示评价值的用户输入来获取上述评价值。与上述例子不同,上位控制器60也可以具有模式切换部,模式切换部71和模式切换部81根据上位控制器60的模式切换部的切换结果来切换控制模式。
[0135]
马达控制系统40也可以通过与基于表示机架机构10的刚性程度的评价值的切换不同的方法来切换控制模式。马达控制系统40例如也可以通过表示控制模式的指定的用户输入来切换控制模式。在机架驱动系统1的实际工作阶段,马达控制系统40可以根据机械结合部12的运行状态(例如,是否正在加速)来切换控制模式。
[0136]
控制装置50b的单独控制部84在不计算基于轴间偏差δy的推进指令的补偿值的情况下,也可以获取控制装置50a的单独控制部74对补偿值的计算结果。控制装置50a的单独控制部74在不计算基于轴间偏差δy的推进指令的补偿值的情况下,也可以获取控制装置50b的单独控制部84对补偿值的计算结果。控制装置50a可以与马达30b连接,控制装置50b也可以与马达30a连接。控制装置50a和控制装置50b可以是同种的控制装置,也可以构成为能够实现彼此相同的功能。在该情况下,与马达30a连接的控制装置作为控制装置50a发挥功能,与马达30b连接的控制装置作为控制装置50b发挥功能。
[0137]
马达控制系统40也可以具备具有控制装置50a及控制装置50b这两者的功能的一个控制装置(控制部)来代替控制装置50a及控制装置50b。在马达控制系统40(控制部)中,与上述例子不同,也可以一体地构成控制装置50a、控制装置50b以及上位控制器60。构成控制装置50a、控制装置50b以及上位控制器60所具有的功能模块的一个程序(控制程序)也可以存储在一个存储介质中。
[0138]
[实施方式的效果]
[0139]
以上说明的驱动系统20包括:沿y1轴驱动机架机构10(机械结合部12)的马达30a、沿y2轴驱动机架机构10的马达30b、以及控制马达30a、30b的马达控制系统40。马达控制系统40具有模式切换部71、81,该模式切换部71、81切换轴间补偿控制模式和分离控制模式,轴间补偿控制模式是指在y1轴和y2轴中缩小轴间偏差δy并单独控制机架机构10在各轴上的位置的模式,所述分离控制模式是指基于机架机构10在y1轴和y2轴上的检测位置来控制机架机构10的位置并控制机架机构10的旋转状态的模式。马达控制系统40按照由模式切换部71、81切换的模式来控制马达30a、30b。
[0140]
在轴间补偿控制模式以及分离控制模式中,例如,控制时的控制增益的大小以及轴间偏差δy的抑制程度彼此不同。机架驱动系统1能够以两个控制模式中某一种模式执行对马达30a及马达30b的控制。因此,能够根据机架机构10的特性以某一种控制模式控制各马达。由于使机架机构10实际动作而能够掌握其特性的情况多,所以在上述构成中,能够节省准备能够根据作为驱动对象的机架机构10的特性而执行与其相应的控制的控制系统的时间。因此,对于设定作业的简化是有用的。
[0141]
模式切换部71、81也可以基于表示机架机构10的刚性程度的评价值,来切换轴间补偿控制模式和分离控制模式。存在能够允许的控制增益根据机架机构10的机械特性而不同的情况。基于上述评价值切换控制模式,由此能够以与机架机构10的机械特性对应的控制模式控制马达。因此,控制稳定性是有用的。
[0142]
模式切换部71、81也可以在上述评价值超过规定的阈值的情况下切换为轴间补偿控制模式,在上述评价值低于阈值的情况下切换为分离控制模式。在分离控制模式中,旋转转矩指令分别反映在来自马达30a、30b的驱动力中,以控制机架机构10的旋转状态,因此能够进一步缩小轴间偏差δy。在轴间补偿控制模式中,在用于位置控制的指令中加入补偿值,向马达输出驱动力,因此存在能够缩小轴间偏差δy的程度小的倾向。通过上述评价值与阈值的比较,能够在适于机架机构10的刚性的控制模式下执行马达30a、30b的控制。
[0143]
马达控制系统40还可以具有:测试控制部64,执行控制马达30a、30b的初始设定控制,使得y1轴上的检测位置y1和y2轴上的检测位置y2追随测试目标位置;刚性评价部66,基于执行初始设定控制期间得到的轴间偏差δy和得到该轴间偏差δy时表示对马达30a、30b各自的推力的指令之差来计算上述评价值。例如,也可考虑在机架驱动系统1的准备阶段,作业者等基于试错或经验来选择适合于实际使用的机架机构10的控制模式。此时,作业者等需要观测机架机构10中的各种状态量来进行判断,劳力大,另外,为了进行最佳判断,作业者等需要经验。在上述构成中,能够利用马达控制系统40自动地选择控制模式。因此,能够减轻作业者等在准备阶段的劳力,另外,即使是经验少的作业者等也能够简单地进行最佳选择。因此,对于简化设定作业更有用。
[0144]
马达控制系统40也可以具有与马达30a连接的控制装置50a和与马达30b连接的控
制装置50b。控制装置50a及控制装置50b也可以彼此可通信地连接。在轴间补偿控制模式中,控制装置50a可以基于y1轴上的检测位置y1来生成对马达30a的指令,控制装置50b可以基于y2轴上的检测位置y2来生成对马达30b的指令。在轴间补偿控制模式中,控制装置50a及控制装置50b的至少一个也可以基于轴间偏差δy生成对马达30a及马达30b的指令的补偿值。在分离控制模式中,控制装置50a也可以基于y1轴上的检测位置y1及y2轴上的检测位置y2生成对马达30a及马达30b的指令,控制装置50b基于轴间偏差δy生成对马达30a及马达30b的指令。在该情况下,能够在以执行y1轴及y2轴各自的轴为单位的位置控制的控制模式、和将机架机构10的控制单位分离为平移和旋转而执行位置控制和旋转位置控制的控制模式中的任一个中,驱动机架机构10。因此,能够根据机架机构10的特性,以适合其特性的控制模式驱动机架机构10。因此,对于使机架机构10高精度地动作是有用的。
[0145]
控制装置50a也可以具有:单独控制部74,在轴间补偿控制模式下,基于y1轴上的检测位置y1以及轴间偏差δy来生成对马达30a的转矩指令tca;以及协作控制部76,在分离控制模式下,基于检测位置y1以及检测位置y2生成对马达30a以及马达30b的平移推力指令trc。控制装置50b也可以具有:单独控制部84,在轴间补偿控制模式下,基于y2轴上的检测位置及轴间偏差δy来生成对马达30b的转矩指令tcb;以及协作控制部86,在分离控制模式下,基于轴间偏差δy生成对马达30a及马达30b的旋转转矩指令roc。这种情况下,在不同的控制模式的每一个中,能够执行机架机构10的位置控制和抑制轴间偏差δy的控制。
[0146]
单独控制部74也可以基于转矩指令tca使马达30a动作。协作控制部76也可以将平移推力指令trc输出到控制装置50b,基于平移推力指令trc和从协作控制部86得到的旋转转矩指令roc使马达30a动作。单独控制部84也可以基于转矩指令tcb使马达30b动作。协作控制部86也可以将旋转转矩指令roc输出到控制装置50a,基于旋转转矩指令roc和从协作控制部76得到的平移推力指令trc使马达30b动作。此时,在轴间补偿控制模式中,在获取来自各马达的检测位置之后,以轴为单位独立地执行马达的控制。另外,在分离控制模式中,根据控制装置50a及控制装置50b分担生成的指令执行马达的控制。在分离控制模式中,在控制装置50a以及控制装置50b之间进行指令的收发,与此相对,在轴间补偿控制模式中,不进行指令的收发,因此响应性变高。因此,能够根据机架机构10所需的响应性进行马达的控制。
[0147]
控制装置50a及控制装置50b也可以每隔规定的周期控制马达30a及马达30b,使得机架机构10接近目标位置,轴间偏差δy缩小。单独控制部74也可以每隔规定的周期执行生成转矩指令tca、和基于该转矩指令tca使马达30a动作。单独控制部84也可以每隔规定的周期执行生成转矩指令tcb、和基于该转矩指令tcb使马达30b动作。在该情况下,由于在一个周期执行指令生成和基于该指令的对马达的动作,因此能够实现响应性高的控制。因此,在希望根据机架机构10的特性提高响应性的情况下,能够以适合该特性的控制模式进行马达的控制。
[0148]
控制装置50a及控制装置50b也可以每隔规定的周期控制马达30a及马达30b,使得机架机构10接近目标位置,轴间偏差δy缩小。协作控制部76也可以每隔规定的周期执行生成并输出平移推力指令trc、和基于在前一个周期生成的平移推力指令trc和旋转转矩指令roc使马达30a动作。协作控制部86也可以每隔规定的周期执行生成并输出旋转转矩指令roc、和基于在前一个周期生成的平移推力指令trc和旋转转矩指令roc使马达30b动作。在
这种情况下,能够在不同的控制装置中分担地生成针对一对马达的用于平移的指令和用于旋转的指令。
[0149]
单独控制部74也可以获取表示机架机构10的目标位置的位置指令yt,生成转矩指令tca以缩小y1轴的检测位置y1与位置指令yt之间的偏差,缩小轴间偏差δy。单独控制部84也可以获取位置指令yt,生成转矩指令tcb以缩小y2轴的检测位置y2与位置指令yt之间的偏差,缩小轴间偏差δy。在这种情况下,在轴间补偿控制模式中,通过执行使机架机构10追随目标位置的位置控制,能够抑制y1轴和y2轴之间的扭转的发生。
[0150]
协作控制部76也可以获取表示机架机构10的目标位置的位置指令yt,生成平移推力指令trc以缩小检测位置y1及检测位置y2的平均值(位置yg)与位置指令yt之间的偏差。协作控制部86也可以生成转矩指令roc以缩小轴间偏差δy。该情况下,在分离控制模式中,通过使机架机构10追随目标位置,并且控制机架机构10的旋转方向的状态,能够抑制y1轴和y2轴之间的扭转的发生。
[0151]
符号说明
[0152]1…
机架驱动系统,10
…
机架机构,20
…
驱动系统,30a、30b
…
马达,40
…
马达控制系统,50a,50b
…
控制装置,64
…
测试控制部,66
…
刚性评价部,71、81
…
模式切换部,74、84
…
单独控制部,76、86
…
协作控制部。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。