1.本发明涉及公路施工管理领域,特别是涉及一种基于无人机和数字地表模型的公路施工阶段预测方法。
背景技术:
2.路基作为路面的基础,路基工程质量的好坏对整个公路的质量起着关键性作用,因此,保证路基工程质量是十分重要的。公路工程路基施工是复杂的系统工程,工期长、投资大、参与方多、合同关系复杂,露天作业多,受自然环境、地质环境影响大。在路基施工过程中不确定性因素多,如工程地质条件、材料设备、而在公路工程路基施工中常见的问题有自然环境、设计方案的变化,导致工程既定目标(安全、质量、费用、工期)可能无法实现。目前我国公路工程在路基施工过程中的演算缺乏真实有效、合理科学的预判,其中一个很重要的因素是对于公路施工过程中的地形数据无法采集,造成工程预演无法直观的进行,从而给施工管理增加了难度。
3.公路绵延数百里,是狭长的带状构筑物,如何快速有效地获取地形数据,从而生成大规模、高精度的三维地形是实现公路工程路基施工管理三维可视化的基础。真实的地形具有高低起伏的状态,并且是一种连续变化的曲面,这种曲面无法用平面地图准确、直观地表示出来,采用数字表面模型(digital surface model,缩写dsm)来模拟真实地形可以很好地解决这一问题。数字地表模型(dsm)是包含了地表建筑物、桥梁和树木等高度的地面高程模型。和传统的数字高程模型(digital elevation model,缩写dem)相比,dem只包含了地形的高程信息,并未包含其它地表信息,dsm是在dem的基础上,进一步涵盖了除地面以外的其它地表信息的高程。
4.获得dsm数据的方式通常采用航空遥感技术,由于航空遥感平台和传感器的限制,普通的航空摄影手段在获取数据方面存在成本高,性价比低等问题。采用无人机技术可作为卫星遥感和普通航测不可或缺的补充。无人机可以超低空飞行,可在云下较好地获取dsm数据,从而为弥补了卫星遥感和普通航测受云层遮挡获取不到影像的缺陷。同时,低空飞行、多角度接近目标,能获得更高分辨率的影像数据。此外,无人机使用成本低、体型小,机动性好。
5.在公路工程领域,采用无人机技术针对路基施工中数字地表模型的数据获取,有着机动性好、摄影效率高、作业成本低等优势,既能减轻数据获取的劳动强度,又能提高作业的技术水平和精度,应用前景极为广阔。
技术实现要素:
6.本发明要解决的技术问题是公路工程在路基施工过程中的演算缺乏真实有效、合理科学的预判方法。
7.为了解决上述技术问题,本发明提出的预测方法分为以下几个阶段:无人机影像拍摄、数据预处理和特征提取、数字地表模型建立、施工阶段预测。
8.本发明的目的是通过以下技术方案实现的:
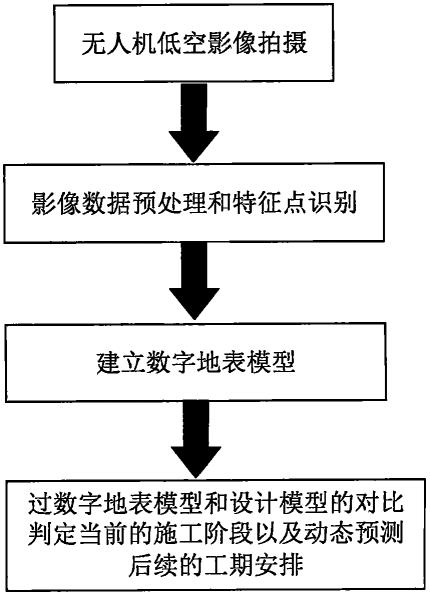
9.提出通过无人机进行低空影像拍摄,拍摄的影像经过数据预处理和特征点识别以用于特征匹配,应用处理后的无人机影像序列建立数字地表模型,再通过数字地表模型和设计模型的对比,做出真实有效、合理科学的推断,判定当前的施工阶段以及动态预测后续的工期安排。
10.本发明提出的预测方法分为以下几个步骤:
11.a、由无人机进行公路路面信息的图像获取,图像的采集质量受到航高、分辨率、飞行速度、重叠度等因素的制约,因此要获取高质量的图像信息,需要构建不同参数之间的关系,分别是(1)航高、焦距以及分辨率的关系;(2)地面覆盖范围;(3)不同影像重叠度。
12.b、对无人机采集的数据进行处理,基于筛选算法、影像质量和投影面最优原则对影像数据集进行排序。对影像数据进行特征点识别与提取,经平差计算和点位调整后,进行场景的三维重建。
13.c、基于处理后的无人机影像进行数字地表模型的构建:构建时要考虑(1)飞行高度对dsm精度的影响、(2)旁向重叠率对dsm精度的影响、(3)拍摄倾斜角度对dsm精度的影响、(4)控制点密度对dsm模型精度的影响、(5)控制点布设方案对dsm的影响。
14.d、构建完dsm模型后,需要将拟建公路工程路基特征点定位到dsm之中,如基坑边线、边坡、道路边线等,以便进行后续应用。将路基施工各个阶段的实际情况与整个路基工程的设计模型都放在dsm模型中,进行对比研究,对路基施工过程作出真实有效、合理科学的预判。
15.有益效果:公路工程在路基施工过程中,通过无人机数据构建的数字地表模型,(1)快速有效地获取地形数据,生成大规模、高精度的三维地形,对实现公路工程路基施工管理进行三维可视化;(2)获得dsm数据的方式通常采用航空遥感技术,采用无人机能够有效降低使用成本;(3)通过对公路施工过程中的地形数据的采集,将路基施工各个阶段的实际情况与整个路基工程的设计模型进行对比,对路基施工过程做出真实有效的预判。
附图说明:
16.下面结合附图和具体实施方式对本发明作进一步详细说明
17.附图1:公路施工阶段预测的总体方框图
18.附图2:无人机数据采集处理及计算流程
19.附图3:多视角影像特征点识别于匹配处理
具体实施方式:
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,仅用于示例性说明,不能理解为对本专利的限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围
21.如图1所示,本发明提出的一种基于无人机和数字地表模型的公路施工阶段预测方法,本发明包括无人机影像拍摄、数据预处理和特征提取、数字地表模型建立、施工阶段预测。
22.所述无人机航拍各参数间解析关系,在公路工程路基施工外业飞行采集数据的过程中,常常受到各类航拍参数诸如航高、分辨率、飞行速度、重叠度等的制约,这些参数决定着外业影像的质量,从而影响着内业解算的处理难度,因此需要对这些参数有较好的规划。
23.(1)分析航高、焦距以及分辨率的关系
24.像元大小是固定不变的,且每一次的飞行任务对地面分辨率都有相应的要求,在传统的测量条件下,每一列的分辨率都是定值,三者之间是存在一定的几何关系,所以需要研究解决航高、焦距以及分辨率的关系,建立数学计算公式。
25.(2)地面覆盖范围计算公式
26.在公路工程外业飞行采集影像的过程中,摄像头在地面上的覆盖范围至关重要,只有知道准确的覆盖范围,才能完成接下来的重叠度计算及进一步的规划,需要根据影像的几何关系推导出在地面覆盖范围的计算公式。
27.(3)重叠度的计算
28.公路工程路基施工中进行航拍需要获取一定数量的照片重叠,重叠度是决定数据解算质量的又一大因素,倾斜像片对应地面覆盖范围是梯形,垂直于飞行方向边长不等,不能以常规方法计算,因此需要对倾斜影像的重叠度数学关系和计算进行推导。
29.所述无人机影像的数据处理和特征提取,将无人机采集回的数据进行整理,其流程如图2。同时基于筛选算法、影像质量和投影面最优原则对影像集进行排序,选择最优的影像进行人工编辑。利用软件进行特征点识别与匹配,经区域网平差计算后,剔除粗差点,反复进行平差计算与点位调整后,得到每张影像精确外方位元素和消除畸变差后的结果,以支持场景三维重建。流程如图3。
30.所述数字地表模型建立,需要针对飞行高度、旁向重叠率、拍摄倾斜角度、控制点密度和控制点布设方案等因素对路基地表模型精度的影响。
31.(1)飞行高度对dsm精度的影响,确定飞行高度在某一数值的情况下,分析对各方向的误差分布状况。同时,针对多种飞行高度下dsm测量误差箱型图,分析影响其精度的因素。
32.(2)旁向重叠率对dsm精度的影响,旁向重叠率是影响dsm精度的重要因素,研究在相同飞行高度和倾斜角度下重叠率的误差分布规律,建立多种旁向重叠率下的模型误差箱型图,总结重叠率对dsm精度的影响。
33.(3)拍摄倾斜角度对dsm精度的影响,在同一重叠率下和同一飞行高度下,分析在不同倾斜角度下的误差分布规律,分析不同角度下对dsm精度的影响。
34.(4)控制点密度对dsm模型精度的影响,分析控制点密度对dsm的影响,采用多组控制点个数的对比方案,设定在统一的重叠率、拍摄倾斜角下,分析不同控制点密度下的误差分析规律。
35.(5)控制点布设方案对dsm的影响,分析控制点布设方案对精度的影响,可采用多组矩形布点方案和多组梅花形布点方案对比的方法,每组方案布控4-6个控制点,固定航向重叠率、旁向重叠率以及拍摄角度。通过分析布控点的均匀度和集中度来控制点布设方案对地表模型精度的影响。
36.所述施工阶段预测,在建立了dsm模型后,针对路基施工的需要进行的应用,公路工程路基施工是复杂的、动态的系统工程,工期长、投资大、参与方多、合同关系复杂,露天
作业多,受自然环境、地质环境影响大。将路基施工各个阶段的实际情况与整个路基工程的设计模型都放在dsm模型中,进行对比研究,可以在路基施工过程中的作出真实有效、合理科学的预判。
37.显然,本发明的上述实施例仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。