1.本发明涉及桥梁三维建模领域,特别是涉及一种基于图像分析技术的桥梁三维模型自动构建方法。
背景技术:
2.传统的建筑物三维重建方法主要有三种:基于几何造型的方法、基于扫描仪器获取物体表面三维信息的方法、基于图像的三维重建方法。基于图像的三维重建技术,采用单幅图像或多幅图像,实现对目标场景的三维重建,并紧随着摄影测量与计算机视觉等学科的发展而迅速成长;基于单幅图像的三维重建是利用单张图像中的二维特征,通过逆求解物理或者光学成像过程解算物体可见表面的三维信息。对建筑物内构件的识别,传统的方法是三维激光扫描和多重合度拍摄。
3.在施工现场应用摄像头监控施工进度、工人行为等,已成为了常态化的手段,而在施工过程中使用bim技术进行碰撞检查、施工模拟也已经是行业应用的常规方式。但如何解决智慧工地与bim相结合,实现数字化和信息化结合是目前行业应用中亟待解决的问题。如果能利用施工现场智慧工地系统下智能监控所采集到的图像信息,经数据提取与加工,导入bim软件中实现智能三维模型重构,无疑将会省去大量的建模时间,同时也能实时监控工程项目的进度。
4.目前,基于图像分析的桥梁构件三维重构技术研究仍是空白,作为信息化、数字化和智能化深度融合的重要体现,大力研究该技术对加快建筑业转型升级,提升生产效率、技术水平和产品质量,降低能耗资源,实现建造过程中的智能化和绿色化发展具有重要意义。
技术实现要素:
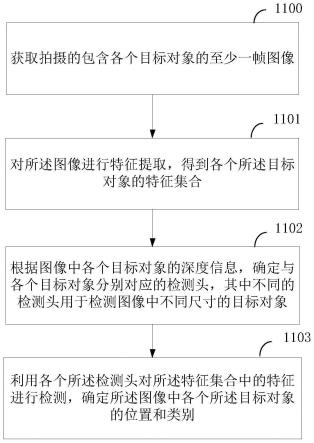
5.本发明提出的基于图像分析技术的桥梁三维模型自动构建方法,具体步骤如下:
6.(1)根据摄像头获取的单目图像信息,进行视觉定位。单目视觉定位的目的是利用摄像头所获取的目标图像来确定其空间定位信息。一是可以从获取的二维图像中推导出物体的空间几何信息,通过摄像头标定过程中所建立的摄像机模型以及求解出的内外参数,可以确定图像坐标中的某一目标点与其在空间直线上所对应的实际点之间的关系,通过这样的两幅图像,再根据两条直线的交点,就可以确定这一目标点的空间几何信息;二是可以根据物体的空间信息计算出它在图像中的二维坐标。
7.(2)通过单目视觉测量来获取相关数据,完成测距模型的选择、摄像机外参数的标定,求取目标物的距离。最后通过几何学来反算桥梁构件的几何尺寸,从而获得桥梁基本体素。
8.(3)本发明主要针对对梁、柱、墩等构件进行识别。基于图像分析的桥梁构件识别主要流程为图像预处理、构件特征提取、构件分类识别三个步骤。
9.a、图像预处理阶段主要包括图像灰度化、图像降噪、图像分割、形态学处理以及位置归一化等几个环节。这几个环节需要根据实际的识别情况选择应用,如需要选取颜色特
征时则不进行图像灰度化。
10.b、在特征提取阶段,可用于识别的桥梁构件特征,有形状特征、纹理特征和颜色特征。形状特征有基于区域的几何特征、不变矩特征以及构件的结构特征。
11.c、在分类识别阶段,则是采用分类方法进行桥梁构件的分类和识别,最后得到各种处理数据和识别结果。
12.(4)由摄像头获取的桥梁构件图像数据,提取出构件的基础数据(如长、宽、高),将该数据转化为bim软件能识别的语言,同时,bim软件基于此项数据,能在bim软件中自动进行建模,实现图像数据与bim数据的智能化转换。
13.有益效果:本发明的核心在于三维模型bim软件中对视频监控所获取的图像数据进行自动识别,能够对采集到的图像进行分析处理,从而得出相关构件尺寸,同时要具备较高的识别率,再通过算法模型分析,自动生成三维模型。
附图说明:
14.下面结合附图和具体实施方式对本发明作进一步详细说明
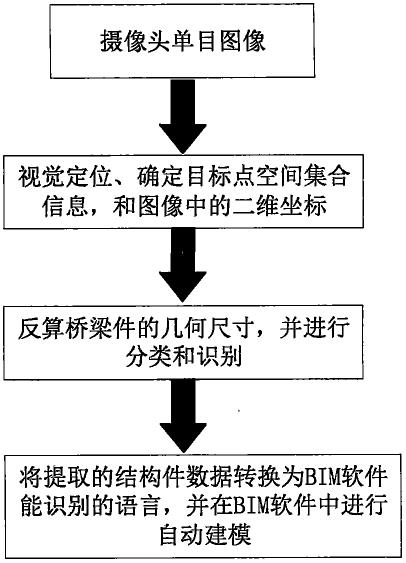
15.附图1:桥梁三维模型自动构建总体框图
16.附图2:由单目图像信息进行视觉定位框图
17.附图3:桥梁构件识别框图
具体实施方式:
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,仅用于示例性说明,不能理解为对本专利的限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.由于桥梁施工现场的监控摄像头数量相对偏少,获取建筑物构件的图像数据覆盖率不高,只能通过单摄像头捕捉图像的方式,而单摄像头所获取的成像(单目视觉)是二维透视图像,将会出现单点透视、二点透视、三点透视等几种现象。需要根据基本体素的透视成像原理和几何关系,建立三维重建的反求算法,从而获取构件数据。单目视觉定位的目的是利用摄像头所获取的目标图像来确定其空间定位信息。
20.(1)可从获取的二维图像中推导出物体的空间几何信息,通过摄像头标定过程中所建立的摄像机模型以及求解出的内外参数,可以确定图像坐标中的某一目标点与其在空间直线上所对应的实际点之间的关系,通过这样的两幅图像,再根据两条直线的交点,就可以确定这一目标点的空间几何信息。
21.(2)可根据物体的空间信息计算出它在图像中的二维坐标。单摄像头(单目视觉)定位还要获取摄像头外的参数矩阵,结合已匹配的特征点计算出目标物的三维空间信息。
22.(3)通过单目视觉测量来获取相关数据的问题,需要完成测距模型的选择、摄像机外参数的标定,求取目标物的距离。最后通过几何学来反算桥梁构件的几何尺寸,从而获得桥梁基本体素。
23.由于桥梁构件类别较多,本发明主要针对梁、柱、墩等构件进行识别。所需获取的数据是基于线段分析。线段提取的一个前提就是边缘检测。在工程中,边缘通常利用边缘检
测算子来检测。在彩色图像中进行边缘检测,需要在基于二维灰度矩阵梯度向量的情况下,使用离散化的梯度逼近函数来寻找图像灰度矩阵中的灰度变化较快的位置,然后再在相应的图像中将这些位置的点连接起来,这样就可以检测出图像的边缘。
24.本发明基于图像分析的桥梁构件识别主要流程为图像预处理、构件特征提取、构件分类识别三个步骤。
25.(1)图像预处理阶段主要包括图像灰度化、图像降噪、图像分割、形态学处理以及位置归一化等几个环节。这几个环节需要根据实际的识别情况选择应用,如需要选取颜色特征时则不进行图像灰度化,在特征提取阶段,可用于识别的桥梁构件特征,有形状特征、纹理特征和颜色特征。
26.(2)形状特征有基于区域的几何特征、不变矩特征以及构件的结构特征。提取构件形状特征的方法有弗里曼链码法、傅里叶描述子、多尺度曲率空间方法、细胞神经网络提取叶脉等。
27.(3)在分类识别阶段,则是采用一些分类方法进行桥梁构件的分类和识别,最后得到各种处理数据和识别结果。
28.由摄像头获取的桥梁构件图像数据,需要提取出构件的基础数据(如长、宽、高),将该数据转化为bim软件能识别的语言,同时,bim软件基于此项数据,能在bim软件中自动进行建模,实现图像数据与bim数据的智能化转换。
29.本发明图像数据识别与分析将基于intel开源计算机视觉库opencv进行开发。拥有包括300多个c函数的跨平台的中、高层api。它不依赖于其它的外部库——尽管也可以使用某些外部库。并且对非商业应用和商业应用都是免费的。它具有统一的结构和功能定义、强大的图像和矩阵运算能力、方便灵活的接口等特点,是计算机视觉、图像处理和模式识别等方面进行二次开发的理想工具。
30.显然,本发明的上述实施例仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。