1.本实用新型是关于智能球摄像技术领域,特别是关于一种稳定型摄像装置。
背景技术:
2.智能球摄像机是采用当今最新的科技成果、最精尖的制造工艺,综合多年的宝贵经验研制成功的,配置了自带变焦镜头的高性能数字信号处理摄像机,集内置云台和数字解码器于一体,代表新一代高技术监控产品的发展潮流。它采用全数码控制,编程灵活;传动系统设计精巧简单,可任意迅速定位及连续追踪扫描,实现了真正意义上的全方位、无盲点监视;可以自动适应环境明暗和目标远近的变化;可靠性高,可长期稳定运行,无须维护。
3.智能球摄像机的种种特性使之适用于各行各业大面积、活动目标的监视。如智能大厦监控、校园课室、银行保安、城市道路监控、电力部门、机场、车站监控等。
4.但本技术实用新型人在实现本技术实施例中的技术方案的过程中,发现上述技术至少存在如下技术问题:
5.现有的智能摄像头及家用监控摄像头中的水平转动结构由单轴承运行,智能摄像头在运行过程中,单轴承安装在水平面的中心位置处,外围结构未设有轴承,在运行时外围结构会出现松动导致智能摄像头在运转时向着一侧倾斜,同时运转过程会出现抖动的问题。
技术实现要素:
6.为了克服现有的智能摄像头及家用监控摄像头中的水平转动结构由单轴承运行,在运行时外围结构会出现松动导致智能摄像头在运转时向着一侧倾斜,同时运转过程会出现抖动的问题,本技术实施例提供一种稳定型摄像装置,本实用新型中在底座内部连接柱安装平面轴承,且平面轴承嵌设在连接轴承和底座内侧,在整体结构水平旋转过程中,通过平面轴承可以承载底座与机身的结构平衡,使整体结构在工作运转中更加平顺,这样在机身水平旋转时,利用平面轴承的承载下不会出现抖动的问题发生。
7.本技术实施例解决其技术问题所采用的技术方案是:
8.一种稳定型摄像装置,包括:连接组件和转动组件,连接组件,其可拆卸的安装在待要安装的墙壁表面,用于固定整体结构稳定;转动组件,其可拆卸的安装在连接组件的一侧,用于对整体结构提供动力;
9.其中,所述连接组件包括底座,且底座表壁轴心处设有连接柱,连接柱的外侧套接有平面轴承,所述平面轴承包括滑动座,且滑动座两面各嵌设有若干个滑柱,所述平面轴承还包括有第一滑板以及第二滑板,所述第一滑板、第二滑板和滑动座均为尺寸相同的圆环体结构,同时平面轴承包括第一滑板、滑动座和第二滑板,在滑动座靠近第一滑板和第二滑板位置处嵌设有若干个滑柱,在运转的时候平面轴承内部的第一滑板对机身下表面起到滑动支撑作用,第二滑板对底座起到滑动支撑作用,这样在机身水平旋转时,利用平面轴承的承载下不会出现抖动的问题发生,平面轴承嵌设在连接轴承和底座内侧,这样底座与机身
相互连接时,在整体结构水平旋转过程中,通过平面轴承可以承载底座与机身的结构平衡,使整体结构在工作运转中更加平顺。
10.优选的,所述平面轴承远离底座的一侧设有连接轴承,所述连接轴承用于承载机身与底座绕连接轴承环绕转动,且连接轴承的另外一侧设有传动齿轮,且传动齿轮与连接轴承采用螺钉固定连接,当所述传动齿轮转动时,用于带动所述连接轴承旋转。
11.优选的,所述底座靠近平面轴承的侧壁设有限位柱,且限位柱为工字型结构,所述限位柱与底座焊接连接,用于对转动组件进行限位,挡位柱环绕连接轴承顺时针或逆时针环绕转动会触碰到底座表面的限位柱,由于步进电机可顺时针转动以及逆时针转动,当受动阻力大于或等于一百五十g会反向转动,从而步进电机会进行反向旋转。
12.转动组件,其可拆卸的安装在连接组件的一侧,用于对整体结构提供动力,所述转动组件包括机身,所述机身与步进电机相交位置处设有固定柱,且所述步进电机与机身通过螺钉与固定柱连接;步进电机,其可拆卸的安装在机身的一侧,用于对整体结构提供动力,同时还包括电机齿轮,其设置于所述步进电机的输出轴,用于带动机身旋转,同时所述传动齿轮贯穿机身与电机齿轮啮合连接,当所述电机齿轮旋转时,带动所述传动齿轮旋转,步进电机运行,带动电机齿轮转动,电机齿轮与机身内部的传动齿轮啮合连接,这样在电机齿轮的旋转下会带动传动齿轮旋转,由于传动齿轮固定在连接轴承上表面,这样传动齿轮在旋转过程中会带动连接轴承转动,从而在步进电机的运行下可带动机身转动。
13.优选的,所述机身靠近底座一侧设有挡位柱,当所述机身旋转时,带动所述挡位柱,当所述挡位柱与所述限位柱相互接触时,所述机身做反向旋转,挡位柱环绕连接轴承顺时针或逆时针环绕转动会触碰到底座表面的限位柱,由于步进电机可顺时针转动以及逆时针转动,当受动阻力大于或等于一百五十g会反向转动,从而步进电机会进行反向旋转。
14.本技术实施例的优点是:
15.本实用新型中在底座内部连接柱安装平面轴承,且平面轴承嵌设在连接轴承和底座内侧,这样底座与机身相互连接时,在整体结构水平旋转过程中,通过平面轴承可以承载底座与机身的结构平衡,使整体结构在工作运转中更加平顺,同时平面轴承包括第一滑板、滑动座和第二滑板,在滑动座靠近第一滑板和第二滑板位置处嵌设有若干个滑柱,在运转的时候平面轴承内部的第一滑板对机身下表面起到滑动支撑作用,第二滑板对底座起到滑动支撑作用,这样在机身水平旋转时,利用平面轴承的承载下不会出现抖动的问题发生。
附图说明
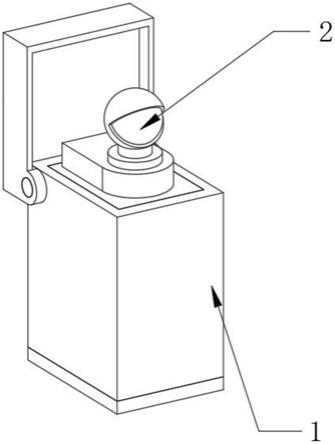
16.图1为本实用新型稳定型摄像装置整体结构示意图;
17.图2为本实用新型底座整体结构示意图;
18.图3为本实用新型稳定型摄像装置俯视结构示意图;
19.图4为本实用新型稳定型摄像装置正视结构示意图;
20.图5为本实用新型平面轴承整体结构示意图;
21.图6为本实用新型滑动座整体结构示意图;
22.图7为本实用新型稳定型摄像装置爆炸分解结构示意图。
23.主要附图标记说明:
24.1、步进电机;2、电机齿轮;3、机身;4、传动齿轮;5、底座;6、连接轴承;7、平面轴承;
71、第一滑板;72、滑动座;73、第二滑板;74、滑柱;8、挡位柱;9、限位柱;10、连接柱。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。此外,下文为了描述方便,所引用的“上”、“下”、“左”、“右”等于附图本身的上、下、左、右等方向一致,下文中的“第一”、“第二”等为描述上加以区分,并没有其他特殊含义。
26.本技术实施例通过提供一种稳定型摄像装置,解决现有技术中现有的智能摄像头及家用监控摄像头中的水平转动结构由单轴承运行,在运行时外围结构会出现松动导致智能摄像头在运转时向着一侧倾斜,同时运转过程会出现抖动的问题,本实用新型中在底座内部连接柱安装平面轴承,且平面轴承嵌设在连接轴承和底座内侧,在整体结构水平旋转过程中,通过平面轴承可以承载底座与机身的结构平衡,使整体结构在工作运转中更加平顺,这样在机身水平旋转时,利用平面轴承的承载下不会出现抖动的问题发生。
27.本技术实施例中的技术方案为解决上述问题,总体思路如下:
28.实施例1
29.本实施例给出一种稳定型摄像装置的具体结构,如图1-7所示,包括:连接组件和转动组件,连接组件,其可拆卸的安装在待要安装的墙壁表面,用于固定整体结构稳定;转动组件,其可拆卸的安装在连接组件的一侧,用于对整体结构提供动力;
30.其中,连接组件包括底座5,且底座5表壁轴心处设有连接柱10,连接柱10的外侧套接有平面轴承7,平面轴承7包括滑动座72,且滑动座72两面各嵌设有若干个滑柱74,平面轴承7还包括有第一滑板71以及第二滑板73,第一滑板71、第二滑板73和滑动座72均为尺寸相同的圆环体结构。
31.平面轴承7远离底座5的一侧设有连接轴承6,连接轴承6用于承载机身3与底座5绕连接轴承6环绕转动,且连接轴承6的另外一侧设有传动齿轮4,且传动齿轮4与连接轴承6采用螺钉固定连接,当传动齿轮4转动时,用于带动连接轴承6旋转。
32.底座5靠近平面轴承7的侧壁设有限位柱9,且限位柱9为工字型结构,限位柱9与底座5焊接连接,用于对转动组件进行限位,挡位柱8环绕连接轴承6顺时针或逆时针环绕转动会触碰到底座5表面的限位柱9,由于步进电机1可顺时针转动以及逆时针转动,当受动阻力大于或等于一百五十g会反向转动,从而步进电机1会进行反向旋转。
33.通过采用上述技术方案:
34.平面轴承7包括第一滑板71、滑动座72和第二滑板73,在滑动座72靠近第一滑板71和第二滑板73位置处嵌设有若干个滑柱74,在运转的时候平面轴承7内部的第一滑板71对机身3下表面起到滑动支撑作用,第二滑板73对底座5起到滑动支撑作用,这样在机身3水平旋转时,利用平面轴承7的承载下不会出现抖动的问题发生,平面轴承7嵌设在连接轴承6和底座5内侧,这样底座5与机身3相互连接时,在整体结构水平旋转过程中,通过平面轴承7可以承载底座5与机身3的结构平衡,使整体结构在工作运转中更加平顺。
35.实施例2
36.本实施例给出一种稳定型摄像装置的具体结构,如图1-7所示,本实施例相比较实施例1还记载了转动组件,其可拆卸的安装在连接组件的一侧,用于对整体结构提供动力,转动组件包括机身3,机身3与步进电机1相交位置处设有固定柱,且步进电机1与机身3通过螺钉与固定柱连接;步进电机1,其可拆卸的安装在机身3的一侧,用于对整体结构提供动力,同时还包括电机齿轮2,其设置于步进电机1的输出轴,用于带动机身3旋转。
37.机身3靠近底座5一侧设有挡位柱8,当机身3旋转时,带动挡位柱8,当挡位柱8与限位柱9相互接触时,机身3做反向旋转,挡位柱8环绕连接轴承6顺时针或逆时针环绕转动会触碰到底座5表面的限位柱9,由于步进电机1可顺时针转动以及逆时针转动,当受动阻力大于或等于一百五十g会反向转动,从而步进电机1会进行反向旋转。
38.通过采用上述技术方案:
39.传动齿轮4贯穿机身3与电机齿轮2啮合连接,当电机齿轮2旋转时,带动传动齿轮4旋转,步进电机1运行,带动电机齿轮2转动,电机齿轮2与机身3内部的传动齿轮4啮合连接,这样在电机齿轮2的旋转下会带动传动齿轮4旋转,由于传动齿轮4固定在连接轴承6上表面,这样传动齿轮4在旋转过程中会带动连接轴承6转动,从而在步进电机1的运行下可带动机身3转动。
40.工作原理:步进电机1固定在机身3上表面,在步进电机1接通电源的情况下,步进电机1运行,带动电机齿轮2转动,电机齿轮2与机身3内部的传动齿轮4啮合连接,这样在电机齿轮2的旋转下会带动传动齿轮4旋转,由于传动齿轮4固定在连接轴承6上表面,这样传动齿轮4在旋转过程中会带动连接轴承6转动,从而在步进电机1的运行下可带动机身3转动。
41.机身3靠近步进电机1一面设有挡位柱8,且挡位柱8环绕连接轴承6顺时针或逆时针环绕转动会触碰到底座5表面的限位柱9,由于步进电机1可顺时针转动以及逆时针转动,当受动阻力大于或等于一百五十g会反向转动,从而步进电机1会进行反向旋转。
42.同时平面轴承7嵌设在连接轴承6和底座5内侧,这样底座5与机身3相互连接时,在整体结构水平旋转过程中,通过平面轴承7可以承载底座5与机身3的结构平衡,使整体结构在工作运转中更加平顺。
43.最后应说明的是:显然,上述实施例仅仅是为清楚地说明本实用新型所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本实用新型的保护范围之中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。