1.本实用新型涉及一种带触觉反馈的假肢手臂,属于智能假肢与触觉反馈技术领域。
背景技术:
2.由于自然灾害,意外事故,老年疾病等原因,我国社会存在大量的残肢患者。其中上肢残肢患者,由于缺少手臂,对正常生活造成了极大的影响。为此,为了帮助残肢患者能像正常人一样生活,各式各样的仿生假手被研制出来。起初,普通的假肢仅起装饰效果。随着科技发展,新型的假肢能实现抓握甚至反馈功能,从而帮助人们生活完成简单的任务,并获得对周围环境的感知。
3.目前的仿生假手多是针对手部的研究,主要是手部运动的控制以及从抓握时会接触到的掌面获得的反馈。这些研究使得假手在完成抓握,做手势等功能时起到很好的效果。但是这些研究忽略了对小臂以及手背的研究,使得目前的假肢手臂不够仿生,无法获取经由小臂,手背给予的触觉信号。为了解手臂上的情况,残肢患者主要依赖视觉,他们无法同正常人一样凭借触觉感知小臂上的情况。致使使用者在不关注假肢的情况下,无法获得对周围环境全面的感知。为此需要一种能从小臂与手背获取对周围环境感知的假肢手臂。
技术实现要素:
4.技术问题:
5.本实用新型的目的是针对现在的假肢手臂无法获取经由小臂,手背给予得到的触觉信息,设计了一种带触觉反馈的假肢手臂。令使用者通过压电薄膜来接收外界的触觉信号,经由控制模块处理,再使振动反馈模块对应位置上的振动器振动,从而获得对周围环境的反馈。
6.技术方案:
7.为了获取外界的触碰信号,采用压电薄膜接收信号。压电薄膜需要分布在假肢手背面,假肢小臂的外表面,假肢小臂的内表面这三个区域。压电薄膜采用分段式布置于各个区域。所有的压电薄膜均需与控制模块接通,其接收到的外界触觉信号都将传至控制模块处理。
8.为了给使用者得到反馈,采用振动反馈模块。振动反馈模块主要由三个振动器构成,布置在手臂护套上,并且其可佩戴于大臂上。其中振动器布置在大臂外表面远假肢端,大臂外表面近假肢端,大臂内表面,它们分别对应于假肢小臂外表面,假肢手背面,假肢小臂内表面上的压电薄膜。当压电薄膜收到信号后,对应位置上的振动器振动刺激使用者,从而实现反馈功能。
9.为了根据不同的触觉信号给予不同的反馈,设计了一种振动器。振动器由多个振动电机构成,均布成一排。振动器的振动规则如下,当同一区域上压电薄膜的信号越多时,则越多的振动电机振动;当压电薄膜的触觉信号越强,振动电机的振动频率越高。
10.为了完成从触碰信号到振动反馈模块的控制,采用了一种控制模块,其特征在于它不仅能完成假肢手臂正常运动的功能。它还能接收压电薄膜的信号,同时对信号进行分析处理,最终发出相应指令,控制振动反馈模块做出相应振动。
11.有益效果:
12.本实用新型将压电薄膜与振动装置结合,令使用者通过压电薄膜来接收外界的触碰信号,再使振动反馈模块对应位置上的振动器振动,从而获得对周围环境的反馈。
13.同时在不同的触碰信号下,振动器可以令不同数量的振动电机振动,并且采用不同的振动频率振动,从而令使用者对周围环境有更准确的认知。
附图说明
14.为了更清楚地说明本实用新型的技术方案,下面将结合实施例的附图作简单介绍:
15.图1是带触觉反馈的假肢手臂整体示意图。
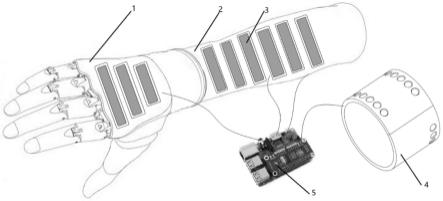
16.图2是压电薄膜分布示意图。
17.图3是振动装置示意图。
具体实施方式
18.下面结合附图和实施例对本实用新型的技术方案进一步说明。
19.一种带触觉反馈的假肢手臂,见图1。该假肢手臂包括假肢手1,假肢小臂2,压电薄膜3,振动反馈模块4,控制模块5。假肢手的手指可以弯折从而完成指定任务。而假肢手的手背部分平整,不会弯折,用于布置压电薄膜,以获取从手背传来的触碰信号。假肢小臂用于连接假肢手与使用者的大臂,帮助小臂残肢患者能使用该假肢手臂。假肢小臂采用轻型材料,并且小臂内部空心,以减少残肢患者的穿戴负担。而假肢小臂的表面需要平整,用于布置压电薄膜,从而获取从小臂两侧传来的触碰信号。
20.所述的压电薄膜3,见图2。上方的假肢手臂手掌朝上,下方的假肢手臂手背朝上。压电薄膜3分布在假肢手1的背面,假肢小臂2的外表面,假肢小臂2的内表面这3个区域。压电薄膜3为长条形,采用分段式布置在各个区域。并且压电薄膜3紧贴在假肢表面,不受假肢自身动作影响。所有的压电薄膜3均可以接收触觉信号,同时均与控制模块5相连。当假肢手臂某个区域上受到大面积的触碰时,该区域上会有多个压电薄膜3受到触碰信号,相反当假肢手臂仅有局部区域受到触碰时,该区域上仅会有一两个压电薄膜3受到触碰信号,从而对触碰信号的范围进行识别。同时压电薄膜3可以根据不同强度的触碰信号产生不同强度的电信号,从而对触碰信号的强弱进行识别。
21.所述的振动反馈模块4,见图3。振动反馈模块4由三个振动器41构成,布置在手臂护套42上。该手臂护套可通过两侧的胶布45佩戴于残肢患者的大臂上。这些振动器41布置在大臂外表面远假肢端,大臂外表面近假肢端,大臂内表面,分别对应于假肢小臂外表面,假肢手背面,假肢小臂内表面上的压电薄膜3。振动反馈模块4需要与控制模块5接通,接收控制模块5传来的指令。当压电薄膜3收到信号后,对应位置上的振动器41会采取相应的振动,从而实现反馈功能。
22.所述的振动器41。一个振动器41由多个振动电机43构成,均布成一排。同时每个振
动器均需配置一个电源模块44,以保证振动器41有充足动力振动。振动器41按如下规则振动,当压电薄膜3的信号振动越强,振动电机43的振动频率越高;当同一区域上压电薄膜3的信号越多时,则越多的振动电机43振动。
23.本实用新型能令使用者通过压电薄膜3来接收外界的触碰信号,经由控制模块5处理,再使振动反馈模块4对应位置上的振动器41振动,从而帮助上肢残肢患者通过假肢手臂获得对周围环境更全面的感知。
技术特征:
1.一种带触觉反馈的假肢手臂,其特征在于,该假肢手臂包括假肢手(1),假肢小臂(2),压电薄膜(3),振动反馈模块(4),控制模块(5)。2.根据权利要求1所述的带触觉反馈的假肢手臂,其特征在于,薄膜需要分布在假肢手背面,假肢小臂的外表面,假肢小臂的内表面这三个区域,分布方法采用分段式布置,所述的假肢手臂的表面需要平整,使得压电薄膜能稳固的布置在假肢手表面,并且压电薄膜均需与控制模块连接,其接收到的外界触觉信号都将传至控制模块处理。3.根据权利要求1所述的带触觉反馈的假肢手臂,其特征在于,其由多个振动器构成,并可佩戴于大臂上,所述的振动器布置在大臂外表面远假肢端,大臂外表面近假肢端,大臂内表面,分别对应于假肢小臂外表面,假肢手背面,假肢小臂内表面上的压电薄膜,所述的压电薄膜收到信号后,对应位置上的振动器振动,从而实现反馈功能。4.根据权利要求3所述的带触觉反馈的假肢手臂,其特征在于,一个振动器由多个振动电机构成,均布成一排,振动器按如下规则振动,当压电薄膜的信号越强,则振动电机的振动频率越高;当同一区域上传来的压电薄膜信号越多时,则越多的振动电机振动。5.根据权利要求4所述的带触觉反馈的假肢手臂,其特征在于,控制模块能接收压电薄膜的信号,同时对信号进行分析处理,并发出指令,控制振动反馈模块做出相应振动,同时控制模块使假肢手臂完成正常运动。
技术总结
本实用新型公开了一种带触觉反馈的假肢手臂,其特征在于该假肢手臂包括(1)假肢手,(2)假肢小臂,(3)压电薄膜,(4)振动反馈模块,(5)控制模块。本实用新型利用压电薄膜来接收假肢手背面,假肢小臂的外表面,假肢小臂上的触觉信号,经由控制模块处理,再使振动反馈模块对应位置上的振动器振动,从而实现对使用者的反馈功能。本实用新型将帮助上肢残肢患者通过假肢手臂获得对周围环境更全面的感知。过假肢手臂获得对周围环境更全面的感知。过假肢手臂获得对周围环境更全面的感知。
技术研发人员:帅立国 阚浩轩 张文哲
受保护的技术使用者:东南大学泰州生物医药与医疗器械研究院
技术研发日:2021.11.03
技术公布日:2023/2/6
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。