具有可变可恢复柔性的带有图案化天线组件的柔性器械
1.相关申请的交叉参考
2.本技术要求以下待决申请的优先权:
3.提交于2020年4月10日的美国临时专利申请号63/008,615;以及
4.提交于2020年5月22日的美国临时专利申请号63/028,928。
5.所有的上述申请以其全部内容通过引用并入本文。此外,通过引用并入的申请中公开的实施例的部件和特征可以与本技术中公开和要求保护的各种部件和特征组合。
技术领域
6.本公开涉及微创消融装置和系统以及相关联的使用方法。
背景技术:
7.微创医疗技术旨在减少医疗程序期间受损的组织量,从而减少患者恢复时间、不适感和有害的副作用。此类微创技术可以通过患者解剖结构中的自然孔口或通过一个或多个手术切口执行。通过这些自然孔口或切口,操作者可以插入微创医疗工具以到达目标组织位置。微创医疗工具包括器械诸如治疗、诊断、活检和手术器械。微创医疗工具还可包括消融器械。消融器械将能量,例如以电磁波的形式的能量,传输到患者解剖结构内的目标组织区域,诸如肿瘤或其他生长物,以破坏目标组织。一些微创医疗工具和消融器械可以是远程操作的或以其他方式计算机辅助的,或由远程操作的、机器人的或以其他计算机辅助的系统输送。各种特征可以改进微创消融器械的有效性。
技术实现要素:
8.本技术的实施例由所附权利要求最好地概括。
9.在一些实施例中,柔性器械包括细长装置,其包括内导体、包围内导体的外导体和将内导体和外导体绝缘的电介质层。该柔性器械包括在外导体中形成的凹槽。插入件在凹槽内并绕内导体定位。
10.在一些实施例中,能量输送系统包括柔性器械。柔性器械包括传输构件、在传输构件的远端处的天线、包围天线和传输构件的护套,以及至少部分设置在护套内的至少一个流体导管。至少一个流体导管限定了流体入口通道,其被配置为将流体运送到天线的远端近侧。此外,至少一个流体导管被配置为沿柔性器械的至少一个区段提供可变的可恢复的柔性。至少一个流体导管进一步由防止干扰天线进行能量输送的材料组成。
11.在这些和其他实施例中,能量输送系统包括柔性器械和流体导管。柔性器械包括传输构件、在传输构件的远端处的天线,以及包围传输构件和天线的护套。流体导管至少部分地设置在护套内。护套限定了包围天线的至少远端部分的流体通道。能量输送系统进一步包括平移致动器,以将流体导管的状态从第一状态改变到第二状态。第一状态包括使天线与流体导管重叠的扩展位置。第二状态包括不使天线与流体导管重叠的缩回位置。
12.在这些和其他实施例中,操作能量输送系统的方法包括(i)提供弹性柔性和(ii)
输送能量。能量输送系统包括具有传输构件的柔性器械、在传输构件的远端处的天线、包围柔性器械的护套,以及至少部分设置在护套内的滑动元件。提供弹性柔性包括使用滑动元件提供弹性柔性,同时滑动元件被定位成在柔性天线导航至对象内的目标期间与天线的至少一个区段重叠。向目标输送能量包括在滑动元件定位在天线近侧时经由天线向目标输送能量。
13.在这些和其他实施例中,操作能量输送系统的方法包括(i)提供弹性柔性和(ii)输送流体。能量输送系统包括具有传输构件的柔性器械、在传输构件的远端部分处的天线、包围柔性器械的护套,以及至少部分设置在护套内的流体导管。提供弹性柔性包括在柔性器械通过患者的解剖结构导航到患者体内的目标期间,使用流体导管向柔性器械的至少一个区段提供弹性柔性。输送流体包括至少在经由天线向目标输送能量时,接近天线输送流体。在流体导管的远端部分延伸到天线的远端部分时,流体经由流体导管输送。
14.在这些和其他实施例中,能量输送系统包括柔性器械,其具有带有内导体的细长装置、包围内导体的外导体,和将内导体与外导体绝缘的电介质层。柔性器械进一步包括在外导体中形成的凹槽,以及在凹槽内并绕内导体设置的插入件。能量输送系统还包括包围柔性器械的护套和至少部分设置在护套内并沿柔性器械延伸的至少一个流体导管。至少一个流体导管限定了流体入口通道,其被配置为将流体运送到柔性器械的远端区域,并沿柔性器械的至少一部分进一步提供可变的可恢复柔性。
15.应理解的是,前面一般描述和以下详细描述两者实质上都是示例性和解释性的,并旨在提供对本公开的理解,而不限制本公开的范围。在这方面,本公开的额外方面、特征和优点对于本领域技术人员来说,将从以下详细描述中明显看出。
附图说明
16.参考以下附图,可以更好地理解本公开的许多方面。附图中的部件不一定按比例绘制。相反,重点在于清楚地展示本公开的原理。附图不应该视为将本公开限于所描绘的具体实施例,而仅用于解释和理解。
17.图1是根据本技术的实施例配置的用于组织消融的柔性器械的侧面横截面图。
18.图2是根据本技术的另一个实施例配置的用于组织消融的柔性器械的侧面横截面图。
19.图3是根据本技术的实施例配置的用于组织消融的能量输送系统的侧面横截面图。
20.图4是根据本技术的另一个实施例配置的用于组织消融的能量输送系统的侧面横截面图。
21.图5是根据本技术的另一个实施例配置的用于组织消融的能量输送系统的侧面横截面图。
22.图6a和图6b是根据本技术的各种实施例配置的图案化流体导管的侧视图。
23.图7是展示了根据本技术的实施例的用于制造能量输送系统的方法的流程图。
24.图8是展示了根据本技术的实施例的用于操作能量输送系统的方法的流程图。
25.图9a是根据本技术的各种实施例配置的用于组织消融的能量输送系统的透视图。
26.图9b是根据本技术的各种实施例配置的图9a的能量输送系统的柔性器械的横截
面端视图。
27.图10是根据本技术的各种实施例配置的用于组织消融的能量输送系统的横截面侧视图。
28.图11是根据本技术的各种实施例配置的用于组织消融的能量输送系统的横截面侧视图。
29.图12是根据本技术的各种实施例配置的用于组织消融的能量输送系统的横截面侧视图。
30.图13是根据本技术的各种实施例配置的用于组织消融的能量输送系统的横截面侧视图。
31.图14a是根据本技术的各种实施例配置的用于组织消融的能量输送系统在第一状态下的横截面侧视图。
32.图14b是根据本技术的各种实施例配置的图14a的能量输送系统在第二状态下的横截面侧视图。
33.图15是展示了根据本技术的各种实施例的用于操作能量输送系统的方法的流程图。
34.图16是展示了根据本技术的各种实施例的用于制造能量输送系统的方法的流程图。
35.图17是根据本技术的各种实施例配置的远程操作医疗系统的简化图。
36.图18a是根据本技术的各种实施例配置的医疗器械系统的简化图。
37.图18b是根据本技术的各种实施例配置的医疗器械系统的简化图。
具体实施方式
38.本公开涉及能量输送系统,其包括微创消融装置和系统(和相关联方法)。能量输送系统用于组织消融,通过从能量输送系统向解剖结构目标区域或消融部位传输电磁波,引起解剖结构目标区域的温度升高。在一些实施例中,能量输送系统包括具有传输构件和从传输构件的远端部分延伸的天线组件的柔性器械。传输构件和天线组件可由细长装置(诸如同轴电缆)形成,该细长装置具有内导体、外导体,和将内导体和外导体电气分离的绝缘层。天线组件可以用外导体中形成的一个或多个凹槽图案化,以修改用于影响组织的电磁能量的场图。
39.为了防止可能对患者组织造成不必要的损害的过度加热,根据本技术配置的能量输送系统可由冷却剂(例如,流体或气体)冷却。因此,在一些实施例中,能量输送系统包括流体冷却系统和柔性器械。柔性器械包括(i)传输构件,(ii)从传输构件的远端延伸的天线,以及(iii)一个或多个流体导管。传输构件、天线和一个或多个流体导管设置在护套内。在护套和天线的至少一部分之间形成流体通道。
40.为了便于将柔性器械输送到患者解剖结构内的目标部位,柔性器械必须具有足够的柔性,以在导航通过患者解剖结构时发生实质性的变形,但仍具有足够的轴向刚性和硬度以在不屈曲或扭结的情况下刺穿组织。此外,柔性器械的远侧区段必须具有足够的弹性,以在变形后返回(例如,恢复、回弹等)到初始(例如,未变形)状态或形状(例如,以减少导航误差和/或在执行刺穿操作前将柔性器械与所期望轴线对准)。与具有实心外导体层的半刚
性同轴电缆相比,具有多纤维外导体层(例如编织层或包裹层)的柔性同轴电缆通常更容易变形,并且因此可能更适合于导航通过曲折的患者解剖结构(例如肺部的气道)。然而,在柔性同轴电缆中形成凹槽可能更加困难,因为多纤维外导体层在切割时趋向于松开或磨损。此外,暴露的内导体和绝缘层可能是机械上的薄弱点,这可能增加柔性器械弯曲时机械故障的可能性,使柔性器械更难插入组织中,降低可恢复性等。此外,传统的同轴电缆可能在外导体上包括一层厚材料,这可能降低柔性器械的可变形性,阻止柔性器械被引入狭窄通路中,和/或干扰围绕柔性器械的冷却剂流动。
41.因此,为了克服这些和其他挑战,本文中描述的柔性器械可以在外导体中的凹槽位置处或附近进行加固。例如,在一些实施例中,由非导电材料(例如塑料、粘合剂、填充物等)制成的插入件被定位在凹槽内,以保护绝缘层和内导体的对应部分并提供机械支持。这种非导电材料优选是具有低rf损耗并可承受消融所需温度的事物(诸如聚四氟乙烯(ptfe)、聚醚醚酮(peek)等)。此外,中间层(例如,封套层或同轴封套层)可以定位在外导体的至少一部分上,以减少或防止在凹槽处松开。中间层可以由材料制成(例如,包括乙烯-四氟乙烯(etfe)或peek在内的含氟聚合物、塑料、聚对苯二甲酸乙二醇酯(pet)涂层、热缩材料等)制成,该材料还向柔性器械提供机械支撑、轴向刚性和/或可恢复性。中间层可由非导电材料或部分导电材料组成(取决于相对于天线组件的定位)。中间层可以足够薄,以避免干扰冷却剂流动,并允许柔性器械在狭窄和/或曲折的解剖通路内导航。
42.如前所述,在一些实施例中,本文中描述的能量输送系统包括一个或多个流体导管以用于向柔性器械输送冷却剂。(多个)流体导管可以延伸到天线组件的至少一个远端部分,以提供可恢复的柔性和沿柔性器械的最大长度的支持,以及向天线组件的远端部分输送冷却剂的额外好处,以用于增加和/或更均匀地冷却天线组件。然而,许多形状记忆和其他弹性柔性材料(包括镍钛记忆合金)在天线组件的微波频率范围内是导电的(例如300兆赫(mhz)到300吉赫(ghz)),这意味着流体导管的任何区域在天线组件旁边行进并由导电材料形成,将在能量输送期间干扰天线组件。因此,流体导管的在天线组件旁边行进的区域可以由塑料、聚合物或其他非导电材料形成,该材料在能量输送期间不干扰天线组件;和/或流体导管的导电的形状记忆区域可以被可变地定位,使得在能量输送期间导电材料不定位在天线组件旁边。
43.弹性柔性材料,诸如镍钛合金或其他形状记忆材料,相对于其他材料来说往往是昂贵的。此外,柔性器械的近侧区段通常不会发生柔性器械远侧区段所经历的变形程度。因此,与柔性器械的远侧区段相比,沿近侧区段的可恢复柔性可能是较小的问题。因此,在一些实施例中,流体导管可以包括区域,该区域可以由较便宜的材料(诸如不锈钢、peek或其他金属和塑料)形成,并且可以沿柔性器械近侧区段的至少一部分行进。
44.本技术的几个实施例的具体细节在本文中参考图1至图18b描述。尽管下文在患者肺部内导航和执行医疗程序的上下文中描述了许多实施例,但除本文中描述的那些外,其他应用和其他实施例也在本技术的范围内。例如,除非另有规定或从上下文中明确指出,本技术的装置、系统和方法可用于在其他患者解剖结构,例如患者的膀胱、尿道、gi系统和/或心脏上、内部或邻近的地方导航和执行医疗程序。
45.应该注意的是,除了本文中公开的那些,其他实施例也在本技术的范围内。此外,本技术的实施例可以具有与本文中所示或所描述不同的配置、部件和/或程序。此外,本领
域普通技术人员将理解,本技术的实施例可以具有除本文中所示或描述的那些之外的配置、部件和/或程序,并且这些和其他实施例可以没有本文中所示或描述的配置、部件和/或程序中的几个,而不偏离本技术。
46.本公开以各种器械和器械的部分在三维空间中的状态来描述各种器械和器械的部分。如本文所用,术语“位置”是指物体或物体的一部分在三维空间中的方位(例如,沿笛卡尔x、y和z坐标的三个平移自由度)。如本文所用,术语“取向”是指物体或物体的一部分的旋转放置(三个旋转自由度——例如,滚转、俯仰和偏航)。如本文所用,术语“姿势”是指物体或物体的一部分在至少一个平移自由度中的位置,以及该物体或物体的一部分在至少一个旋转自由度中的取向(至多六个总自由度)。如本文所用,术语“形状”是指沿物体测量的一组姿势、位置或取向。
47.如本文所用,术语“操作者”应理解为包括可以执行或协助程序的任何类型的人员,并因此包括医师、外科医生、医生、护士、医疗技术人员、其他人员或本文中公开的技术的使用者,以及其任何组合。如本文所用,术语“患者”应被视为包括正在被执行医疗程序的人类和/或非人类(例如动物)患者。
48.图1至图5展示了柔性器械和能量输送系统的各种实施例。在一些实施例中,能量输送系统用于组织消融,诸如通过从天线组件向解剖结构目标区域或消融部位传输电磁波而导致解剖结构目标区域温度升高。如下面更详细地描述,天线组件可以有足够的柔性,以允许导航通过目标区域中的曲折通路,同时也有足够的机械强度和结构完整性,以承受变形(例如弯曲)和/或插入组织中而不发生机械故障(例如屈曲、扭结)。为了防止可能对患者组织造成不必要损害的过度加热,能量输送系统可以由冷却剂(例如,流体、液体或气体)冷却,如下面实施例中公开的。在一些实施例中,能量输送系统可适用于例如手术、诊断、治疗、消融和/或活检程序。在一些实施例中,能量输送系统可作为医疗器械用于用远程操作医疗系统进行的程序,如下面进一步详细描述。虽然本文中提供的一些实施例是关于此类程序的,但对医疗或手术器械和医疗或手术方法的任何提及都是非限制性的。在一些实施例中,能量输送系统可用于涉及传统手动操作医疗器械的非远程操作或非机器人程序。本文中描述的系统、器械和方法可用于动物、人类尸体、动物尸体、人类或动物解剖结构的部分、非手术诊断,以及工业系统和一般机器人、一般远程操作或机器人医疗系统。
49.图1是根据本技术的实施例配置的用于组织消融的柔性器械100的侧面横截面图。如图1所示,柔性器械100包括传输构件102和天线组件104。传输构件102可以是细长结构,其具有近端(未示出)和远侧部分106。天线组件104位于传输构件102的远侧部分106处,并从传输构件102在近侧部分108和天线组件104的远侧尖端110之间向远侧延伸。
50.传输构件102被配置为将能量从近侧能量源(未示出)传导至天线组件104。如下面更详细地描述,天线组件104用于辐射能量(例如,微波能量),以供在组织消融过程中使用。在一些实施例中,天线组件104用于在一米至一毫米的波长范围内,以及在大约300mhz至300ghz的频率范围内产生电磁辐射(例如,微波)。微波是无线电波的一种,由磁场与电场成直角组成,并且磁场和电场两者都以特定的频率振荡,并沿与磁场和电场两者都垂直的方向一起传播。在一些实施例中,由天线组件104辐射的微波的波长和频率可以被修改,以在消融目标部位处引起所期望类型的消融。如下面更详细地描述,天线组件104可以包括天线体112,以及可选的帽状结构114,其特征被配置为生成用于消融的所期望能量辐射图案。
51.在一些实施例中,传输构件102和天线体112由细长装置诸如同轴电缆(例如,柔性同轴电缆)形成。传输构件102和天线体112可以由单个细长装置例如同轴电缆整体形成,使得细长装置的近侧区段形成传输构件102,并且细长装置的远侧区段形成天线体112。细长装置可以具有内导体116、至少部分包围内导体116的外导体118,以及内导体116和外导体118之间的至少一个绝缘层120。绝缘层120可以至少部分地包围内导体116,以使内导体116与外导体118绝缘并电气分离。内导体116和外导体118可以各自由导电材料(例如镍钛合金、铜等)组成。在一些实施例中,内导体116和外导体118由相同的导电材料组成,而在其他实施例中,内导体116和外导体118可以由不同的导电材料组成。绝缘层120可以由非导电材料组成(例如,电介质材料,诸如聚合物)。在一些实施例中,绝缘层120的材料可被选择为沿轴线a提供高的轴向硬度,以允许更大的刚性来刺穿组织。刚性材料诸如peek或聚醚酰亚胺(诸如由沙特阿拉伯利雅得的sabic制造并以商标ultem出售的那些)可以被使用,例如,以提高柔性器械100的硬度,并防止在刺穿操作期间屈曲或扭结。
52.内导体116、外导体118和/或绝缘层120的结构可以被配置为赋予传输构件102和天线体112以柔性。例如,如图1所示,内导体116可以是沿传输构件102和天线体112的长度延伸的细长柔性结构(例如,一个或多个电线、丝线、纤维等)。绝缘层120可以是一层固体材料,或可以包括一个或多个非导电材料的丝线,这些丝线被编织、纺织或包裹围绕内导体116。外导体118可以包括围绕绝缘层120的一个或多个材料层。通过改变层的构造,可以改变细长装置的柔性,并因此改变柔性器械100的柔性。例如,将外导体118或绝缘层120构造为实心管或同心实心管层,可以提供比使用缠绕在带状层或多个带状层中的材料更硬的柔性器械100。通过构建在不同方向上缠绕的丝线的编织层,可以提供更柔性的构造。因此,在一些实施例中,外导体118包括至少一个多丝层,该多丝层具有多个丝线(例如,带子、胶带、电线、纤维等),这些丝线被编织或纺织围绕绝缘层120。丝线可以由导电材料制成(例如,镍钛合金、铜等)。可替代地或组合地,外导体118可以包括至少一个层,其中导电材料的单丝被包裹围绕绝缘层120(例如,包裹的金属带)。可选地,外导体118可以包括至少一层固体材料(例如,箔层、片材、涂层、管等)。
53.在一些实施例中,外导体118完全由单个材料和/或结构组成。例如,外导体118可以包括沿柔性器械100的整个长度编织或包裹的一个或多个丝线。作为另一个示例,外导体118可以包括沿柔性器械100的整个长度延伸的薄实心管。然而,在其他实施例中,外导体118的不同部分可以由不同的材料和/或结构组成。例如,外导体118可以包括编织和包裹材料的组合,诸如由编织材料组成的第一层或区域和由包裹材料组成的第二层或区域。作为另一个示例,外导体118可以包括外编织多丝层和内箔层。在一些示例中,箔层可以由提供屏蔽的材料制成(例如铜)。在需要较高硬度的其他实施例中,内层可由镍钛管或带子制成,其提供低于铜的导电性,但提供较高的硬度和可恢复性。在进一步的示例中,外导体118可以包括编织多丝层、箔层和由弹性柔性材料(例如,镍钛合金)制成的层,以赋予柔性器械100可恢复性。在一些实施例中,外导体118的材料性质可以沿外导体118的长度变化。例如,远侧区段可能需要更高的硬度以允许柔性器械100刺穿组织。因此,在远侧区段处,内层可由镍钛管制成和/或外层可由带状层制成,而在近侧区段处,内层可由箔层制成和/或外层可被编织。
54.柔性器械100还可以包括至少一个封套层或同轴封套层122(在本文中也被称为“中间层”),该层定位在外导体118的至少一部分上。在所展示的实施例中,封套层122沿外导体118的整个长度延伸并包围。类似地,封套层122可以形成在天线体112和传输构件102的整个长度上。然而,在其他实施例中,封套层122可以只在外导体118的一部分上形成。例如,封套层122可以只位于外导体118的远侧区段处,诸如与天线体112以及可选地,传输构件102的一部分(例如,远侧部分106)对应的区域。作为另一个示例,封套层122可以在要形成凹槽的位置处或其附近被定位到外导体118的离散区域,如下面进一步讨论。
55.封套层122可以改进柔性器械100的至少一部分(例如,向天线体112)的结构完整性和/或向其提供机械支持。此外,在外导体118是由编织的、纺织的或包裹的丝线制成的实施例中,封套层122可以将丝线固定在一起,以减少外导体118被切割以形成凹槽时的磨损或松开,如下面更详细地描述。封套层122也可以具有弹性柔性,以改进柔性器械100在变形后的可恢复性。可选地,封套层122也可以提高柔性器械100沿轴线a的硬度,例如,以促进组织的刺穿。封套层122可以足够薄,因此柔性器械100的总直径保持足够小,以导航经过狭窄和/或曲折的通路,同时也避免干扰围绕柔性器械100的冷却剂流动(在下面更详细描述)。例如,封套层122的厚度可以小于或等于30微米、25微米、20微米、15微米、10微米或5微米。在一些实施例中,厚度可以在25.4微米到6.35微米的范围内。在一些实施例中,封套层122由非导电材料组成,诸如聚合物、塑料、pet涂层、热缩材料或其组合。然而,在其他实施例中,封套层122可由部分导电材料组成(取决于该层相对于天线体112的定位)。封套层122可以作为单层材料应用,或可以通过编织多丝层、包裹带状层或热缩材料来在多层中应用。
56.在另外的实施例中,内导体116、外导体118、绝缘层120和/或封套层122的一个或多个方面可以被修改,以帮助进一步防止柔性器械100在弯曲通过狭窄和/或曲折的通路时发生扭结。此类修改可以包括例如改变层厚度、材料选择和/或编织,以获得柔性器械100的最佳硬度,同时允许有足够的柔性以用于导航。
57.在一些实施例中,天线体112被图案化为具有一个或多个凹槽,诸如第一凹槽124a和第二凹槽124b(统称为“凹槽124”)。凹槽124可以是被配置为允许能量从内导体116辐射的任何结构,诸如孔口、狭槽、沟槽、通道、沟槽、螺旋、切口等。如图1所示,凹槽124形成于并延伸通过封套层122和外导体118的整个厚度,其中绝缘层120和内导体116保持完整。可替代地,凹槽124也可以形成于并至少部分延伸通过绝缘层120,其中内导体116保持完整。在凹槽124延伸通过绝缘层120的整个厚度的实施例中,内导体116和/或外导体118在凹槽124处的暴露表面可以被密封或以其他方式彼此绝缘(例如,使用非导电材料),以防止内导体116和外导体118之间在那些位置处的电短路。凹槽124可以通过切割或以其他方式去除封套层122、外导体118和(在一些情况下)绝缘层120的部分来形成,如下面更详细地描述。
58.凹槽124的配置(例如,深度、数量、位置、大小、形状等)可以形成凹槽图案,可以选择凹槽图案以产生来自天线体112的能量辐射的期望图案以及天线体112在其中辐射的特别介质所需的适当频率响应。凹槽的深度、凹槽长度、凹槽124之间的间距、凹槽124的数量、凹槽124的形状、凹槽124沿天线体112的定位和/或凹槽124彼此的相对定位,可以限定凹槽图案。在所展示的实施例中,例如,第一凹槽124a位于天线体112的远侧尖端部分126处,并且第二凹槽124b定位在第一凹槽124a的近侧。第一凹槽124a和第二凹槽124b可以以在3mm到10mm的范围内的分离距离彼此分离,诸如6.5mm。如图1所示,凹槽124各自部分或完全围绕天线体112的圆周延伸,以形成具有矩形横截面形状的一对弧形或圆形狭槽。每个凹槽
124的长度(例如,沿平行于轴线a的纵向方向测量)可以大于0mm并且小于或等于10mm(例如,1mm)。可选地,凹槽124可以有不同的尺寸,例如,第一凹槽124a可以比第二凹槽124b更长,反之亦然。然而,在其他实施例中,一些或所有的凹槽124可以具有相同的尺寸,例如,第一凹槽124a可以具有与第二凹槽124b相同的长度。图1所示的凹槽124的配置可以产生具有球形或大致球形电场轮廓的能量辐射图案,这可以有利于有效的组织消融。凹槽124的配置还影响到特别介质中的频率响应,这影响到天线体112向介质辐射的效率。
59.在其他实施例中,例如,天线体112可以包括不同数量的凹槽124(例如,一个、三个、四个或更多个)。凹槽124的位置也可以改变,例如,第一凹槽124a或第二凹槽124b可以省略,天线体可以在第一凹槽124a和第二凹槽124b之间包括一个或多个附加凹槽,等等。此外,凹槽124中的一个或多个可以具有不同的整体形状(例如,线性、弯曲形、曲线、环形、螺旋形、蛇形、之字形等)和/或横截面形状(例如,方形、梯形、三角形、圆形、椭圆形等)。尽管图1展示了每个凹槽124围绕天线体112周向延伸,但在其他实施例中,凹槽124中的一个或多个可以不同地布置,例如,沿天线体112的长度纵向延伸、围绕天线体112螺旋式延伸,或任何其他合适的几何形状。
60.在一些实施例中,除了凹槽124,外导体118可以包括图案结构(patterning),例如,仅外导体118内的切割图案,以改变柔性。与凹槽124相比,此种图案结构可能不会延伸通过封套层122,并且不改变能量的输送。图案结构可以包括多个不同的形状/布置(例如,离散的狭缝、螺旋/螺旋形狭缝或切口、矩形开口、h形图案,等等)。图案结构可沿柔性器械100的长度仅沿外导体118的一个或多个选定部分延伸。此外,在一些实施例中,图案结构可以沿外导体118的长度变化。
61.天线组件104进一步包括耦连到天线体112的一个或多个插入件,诸如第一插入件128a和第二插入件128b(统称为“插入件128”)。每个插入件128被定位在各自的凹槽124内以覆盖和保护凹槽124处或附近的内导体116和/或绝缘层120的部分。如前所述,当封套层122、外导体188和/或绝缘层120的部分被去除以形成凹槽124时,绝缘层120和/或内导体116的剩余部分可能缺乏足够的机械强度和/或轴向刚性以承受在柔性器械100的操作期间可能发生的弯曲或其他变形。因此,插入件128可以在凹槽124处或附近加强天线体112,以减少在那些位置处发生机械故障(例如,屈曲、扭结)的可能性。插入件128的存在也可以提高天线体112的硬度以促进组织的刺穿。
62.插入件128可以由低rf或微波损耗的非导电材料组成,以减少对内导体116的能量辐射的干扰。非导电材料可以是例如塑料材料(例如,ptfe、peek、氟化乙烯丙烯(fep)、聚氨酯),热缩材料,或其组合。在一些实施例中,插入件128作为预先形成的固体部件提供,其被定位在凹槽124内并被固定在适当位置(例如,使用粘合剂、紧固件、插入件128上的额外材料层等)。例如,插入件128可以是定位在凹槽124内的管。管可以是狭长的或以其他方式可扩展的,以允许管滑过天线体112并进入凹槽124中。在其他实施例中,插入件128可以由填充物(例如,珠子、纤维、胶水、树脂、泡沫等)组成,这些填充物被置于凹槽124中,然后固化(例如,通过粘合、固化、粘附等)以形成插入件128。例如,填充物可以是塑料珠子(例如,由普通ptfe、ptfe泡沫、fep(氟化乙烯丙烯共聚物)、peek等组成的珠子)。作为另一个示例,填充物可以是胶水或其他可流动的材料(例如,聚氨酯),其填充凹槽124,并随后在适当位置硬化和/或固化以形成插入件128。在一些实施例中,填充材料是低rf或微波损耗的材料,其
也可承受天线体112以最大功率或接近最大功率操作时所需的温度。
63.在所展示的实施例中,每个插入件128填充整个对应凹槽124,每个插入件128的几何形状(例如,大小、形状)一般与对应凹槽124的几何形状类似或相同。例如,插入件128可以各自是弧形或环形结构(例如,管、环、带等),其成形以适配于凹槽124中。如图1所示,第一插入件128a具有与第一凹槽124a的矩形横截面形状对应的矩形横截面形状,并且第二插入件128b具有与第二凹槽124b的矩形横截面形状对应的矩形横截面形状。同样,每个插入件128的长度和高度可以与各自的凹槽124的长度和高度匹配。然而,在其他实施例中,插入件128可以不填充整个凹槽124。例如,插入件128可以只填充最靠近内导体116的凹槽124的部分,而将凹槽124的其他部分留空。在此类实施例中,插入件128的几何形状可与对应凹槽124的几何形状不同(例如,插入件128与凹槽124相比可具有较小的长度和/或高度)。
64.在一些实施例中,天线组件104进一步包括帽状结构114,该帽状结构114例如在第一凹槽124a和第一插入件128a远侧的位置处与天线体112的远侧尖端部分126耦连。帽状结构114可以(例如,通过焊接)耦连到内导体116、形成在内导体116上,或与内导体116整体形成。帽状结构114可以由导电材料制成,诸如金属(例如镍钛合金、铜等)。例如,帽状结构114可以由导电金属管(例如镍钛合金、铜等)形成,包围向远侧延伸越过外导体118和天线体112的远侧尖端部分126的内导体116的一部分。帽状结构114可以用焊料与内导体114电耦合。帽状结构114的几何形状(例如,形状、长度、直径等)可以被配置为影响天线组件104的能量辐射图案。例如,在所展示的实施例中,帽状结构114具有一般圆柱形的形状,其长度在1mm到3mm范围内(例如2mm),并且直径与内导体116、外导体118和绝缘层120的组合直径相同或类似。然而,在其他实施例中,帽状结构114可具有不同的形状,诸如圆锥形、尖形、圆顶形、半球形或圆形。例如,帽状结构114可具有圆锥形或尖形,例如,以允许柔性器械100刺穿组织。在其他实施例中,帽状结构114可以是可选的,并可以从天线组件104中省略。在此类实施例中,内导体116的一部分可以向远侧延伸越过外导体118和天线体112的远侧尖端部分126。
65.可选地,帽状结构114的至少一部分(例如,帽状结构114的远端)可以用塞子(未示出)密封。塞子可以由非导电材料制成,诸如胶水或另一种粘合剂、保形涂层(例如,聚对二甲苯涂层或气相沉积涂层)或可回流材料。在一些实施例中,例如,塞子是通过向帽状结构114的远端添加胶水形成的。作为另一个示例,塞子可以通过用玻璃模具模塑可回流材料来形成。塞子可以被配置为密封帽状结构114和/或天线组件104的其他部分以防止流体进入。
66.凹槽图案以及帽状结构114的长度、直径和/或形状(如果天线组件104包括帽状结构114),都会影响频率行为和由此产生的对介质的辐射。凹槽124和插入件128的配置也可以按期望改变,以产生不同的能量辐射图案。
67.柔性器械100可以在天线组件104上包括一个或多个附加的材料层。如图1所示,例如,柔性器械100包括定位在天线组件104的至少一部分(例如,外导体118、封套层122、插入件128和/或帽状结构114)上的屏障层130。在帽状结构114用塞子密封的实施例中,屏障层130可以在帽状结构114和塞子上部分或完全延伸。在一些实施例中,屏障层130仅局限于天线组件104的在凹槽124和插入件128的位置处或附近的部分。然而,在其他实施例中,屏障层130可以在天线组件104的整个长度上延伸。可选地,屏障层130也可以在传输构件102上部分或完全延伸。
68.屏障层130可以产生屏障或密封以防止流体(例如,冷却剂、体液等)向内迁移。例如,屏障层130可以防止流体越过插入件128并朝向内导体116和/或绝缘层120移动。屏障层130也可以密封天线组件104的远侧尖端110以防止液体进入。在一些实施例中,屏障层130还将插入件128固定在凹槽124内,作为粘合剂的补充或替代。可选地,屏障层130可以向柔性器械100提供机械稳定性和轴向刚性。在一些实施例中,屏障层130可以包括多层,例如,可以帮助固定插入件128和帽状结构114的内部屏障层(未示出)和/或可以提供密封以防止流体进入的外部屏障层(未示出)。在一些实施例中,可以通过使用各种材料和改变层数,使用多层来实现所期望的弯曲和硬度。
69.屏障层130可以由柔性和流体可不渗透的材料形成。在一些实施例中,屏障层130由非导电材料组成,诸如聚合物(例如,氟聚合物)、塑料、pet涂层、热缩材料或其他保形涂层(例如,聚对二甲苯涂层或气相沉积涂层),或其组合。屏障层130可以很薄,并围绕柔性器械100的部件形成配合,或者可以保持柔性管状。可选地,在天线组件104的远侧尖端110处的屏障层130的区域可以由粘合剂形成或用粘合剂密封。在此类实施例中,粘合剂可以由与屏障层130的其余部分相同的材料组成,或者可以由不同的材料组成。
70.尽管图1展示了用于柔性器械100的特别配置,但应理解的是,该配置可以以许多不同的方式变化。例如,可以使用内导体116、外导体118和绝缘层120的具有不同配置、形状等的其他细长装置配置。作为另一个示例,柔性器械100可以包括图1中没有示出的附加材料层(例如,绝缘层、封套层、屏障层等)。此外,尽管图1描绘了传输构件102和天线组件104是彼此整体形成的,但在其他实施例中,传输构件102和天线组件104可以是离散部件,随后彼此耦连在一起。例如,传输构件102可以由第一细长装置区段形成,而天线组件104可以由与第一细长装置区段不同的第二细长装置区段形成。第二细长装置区段可以固定地耦连到第一细长装置区段的远端,以形成柔性器械100。在此类实施例中,第一细长装置区段和第二细长装置区段可以每个都具有各自的内导体、外导体和绝缘层,其特征与内导体116、外导体118和绝缘层120的特征相同或大致类似。
71.图2是根据本技术的另一个实施例配置的用于组织消融的柔性器械200的侧面横截面图。柔性器械200与图1的柔性器械100大致类似,使得相似的参考数字用于识别图1和图2中展示的相似元件(例如,传输构件102与传输构件202)。因此,对柔性器械200的讨论将限于与图1的柔性器械100不同的那些特征。
72.柔性器械200包括具有天线体212的天线组件204,该天线体具有第一凹槽224a和第二凹槽224b。与图1的柔性器械100相比,第一凹槽224a不位于天线体212的远侧尖端部分226处。相反,第一凹槽224a在远侧尖端部分226近侧并与其间隔开,使得外导体218和封套层222在远侧尖端部分226处保持完整。第一凹槽224a和远侧尖端部分226之间的距离可以大于0mm并且小于或等于10mm。
73.此外,天线组件202不包括帽状结构,而是包括与天线体212的远侧尖端部分226耦连的导电材料250。在一个实施例中,导电材料250可以仅与内导体218或仅与外导体216电耦合。然而,在另一个实施例中,导电材料250可以将内导体216与天线体212的外导体218电耦合(例如,电短路)。导电材料250可以包括焊料或其他合适的导电材料。导电材料250也可以包括铜(例如,铜管)。导电材料250的几何形状(例如,形状、长度、直径等)可以被配置为影响天线组件104的能量辐射图案。可选地,导电材料250的至少一部分(例如,导电材料250
的远端)可以用塞子(未示出)密封。该塞子可由非导电材料制成,诸如胶水或另一种粘合剂、保形涂层(例如,聚对二甲苯涂层或气相沉积涂层)或可回流材料。在一些实施例中,例如,塞子通过向导电材料250的远端添加胶水,或通过用玻璃模具模塑可回流材料来形成。塞子可以被配置为密封导电材料250和/或天线组件204的其他部分以防止流体进入。
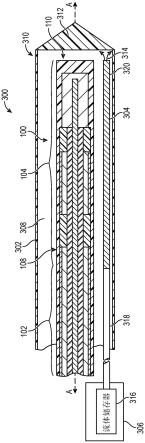
74.图3是根据本技术的实施例配置的用于组织消融的能量输送系统300的侧面横截面图。在所展示的实施例中,能量输送系统300包括图1的柔性器械100、护套302、至少一个流体导管304和流体冷却系统306。然而,在其他实施例中,柔性器械100可以用本文中描述的柔性器械的其他实施例中的任一个(例如,图2的柔性器械200)代替。
75.护套302是细长中空结构,其具有在远端部分310和近端部分(未示出)之间延伸的中心腔或通道308。柔性器械100被设置在中心腔308内。在一些实施例中,护套302可由热塑性材料或其他柔性和流体不可渗透的材料形成。在一些实施例中,护套302被封闭、密封或以其他方式限制流体进入或离开护套302。例如,护套302可以与护套302的远端部分310处的尖端区段312耦连和/或被其密封。尖端区段312可允许护套302更容易刺穿解剖组织。在一些实施例中,尖端区段312可以以将优化组织穿透的任何形状(包括形成尖端的任何数量的面)、以任何角度和/或以任何大小比率(例如,宽度与长度)形成。例如,在所展示的实施例中,尖端区段312是具有三角形横截面形状的锥形结构。在其他实施例中,尖端区段312可具有不同的形状,诸如圆顶、半球形或圆形的形状。尖端区段312可以使用玻璃模具或其他合适的技术形成。尖端区段312可以由含氟聚合物组成,例如,乙烯-四氟乙烯(etfe)、peek、其他高温塑料材料和/或其他合适材料。在进一步的实施例中,尖端区段312可具有其他配置/特征。例如,尖端区段312的一个或多个部分可以是不透射线的。在此类实施例中,尖端区段312可包括使尖端区段不透射线的一种或多种材料,和/或尖端区段可包括由高度不透射线材料制成的插入件。
76.用于优化组织穿透的各种尖端在以下文献中描述:提交于2019年10月31日公开了“tissue penetrating device tips(组织穿透装置尖端
)”的美国专利申请序列号16/670,846以及提交于2019年3月28日公开了“systems and methods related to flexible antennas(与柔性天线相关的系统和方法)”的pct申请号pct/us19/24564,这两个专利都以其全部内容通过引用并入本文。可替代地或组合地,护套302可以在护套302的任何部分处(例如在护套302的远端部分310处)或沿护套302的任何部分具有开口、狭缝或以其他方式不密封,以允许流体进入护套302或从护套302流出。可选地,尖端区段312可以被省略,并且远端部分310可具有平坦的端面,或者可以保持开放。
77.流体冷却系统306可以被配置为通过将冷却剂(例如,流体314或另一种液体或气体冷却剂)引入护套302的中心腔308(例如,在本文中也被称为室或通道)中来冷却柔性器械100。流体314可以是例如水或盐水溶液。流体冷却系统306可以耦连到中心腔308和/或护套302,以将流体314输送到中心腔308中。流体冷却系统306可以包括流体储存器316(示意性地示出)和其他部件,诸如泵、阀、制冷系统、抽吸系统和/或传感器(未示出)。在所展示的实施例中,例如,流体冷却系统306包括或耦连到至少一个流体导管304,其在护套302内延伸通过中心腔308的至少一部分。流体导管304可以沿柔性器械100的至少一部分延伸,诸如沿传输构件102和/或天线组件104。流体314可以通过流体导管304在中心腔308内被引导。因此,在柔性器械100和护套302的内部之间可以形成通道。在一些实施例中,流体导管304
可以延伸到天线组件104的至少一个远端部分,以沿柔性器械100的最大长度提供可恢复的柔性和支持,以及向天线组件104的远端部分输送冷却剂以用于增加和/或更均匀地冷却天线的额外好处。下面参考图9a至图16描述关于此类实施例的进一步细节。
78.柔性器械100可具有足够小的外直径,以减少或避免干扰流体314通过通道的流动。例如,柔性器械100的外直径可以小于或等于2mm、1.75mm、1.5mm、1.25mm、1mm或0.75mm。在一些实施例中,柔性器械100的外表面和护套302的内表面之间的最大间隙可以是至少0.1mm、0.25mm、0.5mm、0.75mm、1mm或1.25mm。
79.流体冷却系统306可以是开环系统、部分开环系统、闭环系统或任何其他合适类型的冷却系统。例如,流体导管304可用于向中心腔308提供流体314的流入。流体314可以在中心腔308内绕天线组件104和/或传输构件102循环,并可以在中心腔308内在近侧方向上返回,以在储存器(未示出)中净化(purge)或净化到环境。在其他实施例中,流体314可以经由护套302中的开口或狭缝退出护套302,或经由中心腔308和/或另一个流体导管(未示出)返回到流体冷却系统306。可替代地,流体导管304可通过中断来自流体储存器316的入口流体、使流动反向,并使用流体冷却系统306向流体导管304提供抽吸,来用于提供流体314从中心腔308的回流。在其他实施例中,可以提供单独的流体导管(未示出),该导管不提供流体314的流入并且仅用于回流。在一些实施例中,回流可以通过在近侧方向上流经中心腔308、流经流体导管和/或流经护套302中的开口的组合来净化。
80.在能量输送系统300的操作期间,包含柔性器械100的护套302被插入患者的解剖结构中并被导航到目标部位。为了便于将护套302和柔性器械100输送到目标部位,护套302和/或柔性器械100必须有足够的柔性,以导航经过曲折的解剖通路。此外,护套302和/或柔性器械100的远侧区段在输送到目标部位期间通常会发生很大的变形。因此,护套302和/或柔性器械100必须能够在变形后恢复到初始(例如,未变形)的形状或状态,以减少一旦接近目标部位时的轨迹误差,其中需要刺穿组织以准确地将天线组件104输送到目标部位。因此,在一些实施例中,护套302本身由提供了可恢复性(例如,回弹)和硬度的机械性质的一种或多种材料组成。例如,护套302可以由弹性柔性材料(例如,镍钛合金或另一种合适的形状记忆材料)形成。护套302可以由非导电材料和/或导电材料组成(例如,取决于相对于天线组件的定位)。可替代地或组合地,柔性器械100可以包括弹性柔性材料,如前所述。此外,在一些实施例中,流体导管304也部分或全部由弹性柔性材料组成,以提供可恢复性。然而,许多形状记忆和其他弹性柔性材料(包括镍钛合金)在微波频率范围内(例如,300mhz至300ghz)是导电的,这意味着在护套302内在天线组件104旁边行进并由导电材料形成的流体导管304的任何区域将在能量输送期间干扰天线组件104。
81.因此,流体导管304可以包括由弹性柔性材料(例如,形状记忆材料,诸如镍钛合金)形成的第一区域318和由非导电材料(例如,peek、ptfe、pet或另一种合适的塑料或聚合物材料)形成的第二区域320。第一区域318沿传输构件102延伸,并且第二区域320沿天线组件104延伸。如图3所展示,第一区域318终止于沿柔性器械100的长度接近天线组件104的近侧部分108的点,使得第一区域318在能量输送期间不干扰天线组件104。第二区域320可以在天线组件104的远侧尖端110处或附近终止,或者可以延伸到护套302的远端部分310(例如,沿柔性器械100和/或护套302的整个长度提供硬度和轴向刚性)。因为流体导管304的第二区域320由在天线组件104的频率范围内非导电的材料形成,所以第二区域320在能量输
送期间不会干扰天线组件104。
82.以这种方式,图3所展示的流体导管304提供了在整个患者解剖结构中导航护套302和柔性器械100的柔性,以及在刺穿操作期间准确地将天线组件104输送到目标部位的刚性。特别地,流体导管304的第一区域318向护套302提供了可恢复的柔性,而流体导管304的第二区域320向护套302的与天线组件104对应的部分提供了添加的硬度,而在能量输送期间不会干扰天线组件104。此外,流体导管304的第一区域318和第二区域320沿轴线a提供轴向刚性,以便于在刺穿操作期间将天线组件104输送到目标部位,同时减少沿护套302和/或柔性器械100发生屈曲或扭结的可能性。
83.应理解的是,在一些情况下,第一区域318和第二区域320之间的过渡区段可能是沿柔性器械100的长度的薄弱点,并且在一些情况下会导致扭结。为了帮助解决该问题,流体导管304的第二区域320可以使用各种方法中的任一种联接到第一区域318,以帮助提供一致和可靠的连接。例如,在一些实施例中,为了形成流体导管304,形成第二区域320的管(例如,由peek或塑料材料组成的管)可以被插入到形成第一区域318的管(例如,由镍钛合金组成的管)中,并且然后这两个管的配合端变细。在另一个实施例中,第二区域320的近端部分可以拼接以在第一区域318的远端部分之上或之内延伸。作为另一个示例,第二区域320可以与第一区域318对接并焊接或胶接。作为另一个示例,第一区域318可以被开槽以降低其硬度(例如,如下面关于图5更详细描述),并然后与第二区域320重叠,以在第一区域318和第二区域320之间产生渐进的过渡。在一些实施例中,fep层可以包围流体导管304,以帮助联接第一区域318和第二区域320。在一些实施例中,第一区域318(例如由镍钛合金组成)和第二区域320(例如由塑料或聚合物材料组成)之间的过渡区段可以由两种不同材料的混合物组成。然而,在其他实施例中,过渡区段可以具有不同的组成。
84.尽管图3展示了单个流体导管304,但在其他实施例中,能量输送系统300可以包括多个流体导管304(例如,两个、三个或更多个)。在此类实施例中,每个流体导管304可以彼此分开,使得当护套302被导航到目标时,每个流体导管可以彼此独立地挠曲。在一些实施例中,单独的流体导管304比彼此附接的流体导管304提供更大的可恢复柔性和/或轴向刚性。然而,在本技术的其他实施例中,流体导管304可以彼此联接和/或可以形成为单个结构。每个流体导管304可以固定在护套302内,或者可以(例如,沿与轴线a平行的方向向远侧和/或向近侧)在护套302内滑动或以其他方式移动。在包括多个流体导管304的进一步实施例中,导管304可以纵向交错(即,管远端的纵向定位可以沿装置的长度不同)。此外,在包括多个导管304的实施例中,由不同材料组成的各个导管304的部分(即第一区域和第二区域)可以在不同导管304之间不同。例如,第一区域318(例如,由镍钛合金组成)相对于第二区域320(例如,由(多种)塑料材料组成)的长度的纵向长度可以在各个导管之间不同。此外,在一些实施例中,各个导管304的开槽图案也可以不同。
85.图4是根据本技术的另一个实施例配置的能量输送系统400的横截面图。能量输送系统400与图3的能量输送系统300大致类似,不同的是图4中展示的能量输送系统400的流体导管404包括在第一区域418近侧的第三区域422。因此,相似的参考数字用于识别图3和图4中展示的相似元件,并且对能量输送系统400的讨论将限于与图3的能量输送系统300不同的那些特征。此外,应理解的是,能量输送系统400的部件可以具有与上述能量输送系统300相同的许多特征和优点。
86.如图4所展示,护套402包括近侧区段424和远侧区段426。远侧区段426从近侧区段424在沿传输构件102长度的点处向远侧延伸到天线组件104的至少远侧尖端110(例如,到护套402的远端410)。流体导管404的第三区域422可以沿护套402的近侧区段424的至少一部分延伸,而流体导管404的第一区域418可以沿护套402的远侧区段426的至少一部分延伸,以沿护套402的该部分提供可恢复的柔性。流体导管404的第二区域420可以沿天线组件104延伸,在天线组件104的远侧尖端110处或附近终止。
87.相对于其他材料,弹性柔性材料,诸如镍钛合金或其他形状记忆材料,往往很昂贵。此外,护套402的近侧区段424通常不会发生护套402的远侧区段426所经历的变形程度。因此,与远侧区段426相比,沿护套402的近侧区段424的可恢复的柔性可能是较小的问题。因此,为了降低成本,流体导管404的第三区域422可以由比用于形成流体导管404的第一区域418的弹性柔性材料(例如,镍钛合金)更便宜的材料形成。例如,流体导管404的第三区域422可以由塑料、聚合物或其他合适的材料(例如不锈钢)形成,这些材料可以向护套402的近侧区段424提供支持和轴向刚性,但不提供更昂贵的材料诸如镍钛合金等所提供的可恢复的柔性。在一些实施例中,用于形成流体导管404的第三区域422的材料可以基于护套402的近侧区段424的所期望柔性(例如,硬度)和/或轴向刚性来选择,第二区域420可以由非导电材料形成,如前所述。在可替代实施例中,如果冷却和刚性需求不需要流体导管404延伸到天线组件104的远侧尖端110,则第二区域420可以省略。
88.流体导管404的第三区域422可以使用各种方法中的任一种联接到第一区域418。例如,第三区域422的远端部分可以被拼接以在第一区域418的近端之上或之内延伸。可替代地,第三区域422的远端部分可以被收缩,并至少部分地与第一区域418的近端重叠。作为另一个示例,第三区域422可以与第一区域418对接或胶接或焊接。作为另一个示例,第一区域418可以被开槽以降低其硬度(例如,如下面关于图5更详细描述),并然后与第三区域422重叠,以在区域422和418之间产生渐进的过渡。在一些实施例中,fep层可以包围流体导管404以帮助联接第三区域422和第一区域418。
89.图5是根据本技术的进一步实施例配置的能量输送系统500的横截面图。除了图5中展示的流体导管504用多个狭槽528(例如,切口、狭缝等)图案化之外,能量输送系统500与图3和图4的能量输送系统300/400大致类似。因此,相似的参考数字用于识别图3至图5中展示的相似元件,并且对能量输送系统500的讨论将限于与图3和图4的能量输送系统300/400不同的那些特征。此外,能量输送系统500的部件可具有与上述能量输送系统300和400相同的许多特征和优点。
90.如图5所示,流体导管504包括第一区域518和第二区域520。在所展示的实施例中,流体导管504的第一区域518和第二区域520两者都包括沿其长度的梯度槽528,以改变流体导管504的对应区域518和520的硬度。例如,流体导管504可以在沿第一区域518和/或第二区域520的不同位置处包括狭槽528,以改变流体导管504的硬度,使得第一区域518和第二区域520之间的过渡是渐进的(例如,以跨过过渡部分保持流体导管504的结构完整性)。作为另一个示例,流体导管504的第一区域518和/或第二区域520可以在期望更大量柔性的位置处包括更多数量的狭槽528,和/或在期望更大量硬度的位置处包括更少数量的狭槽528。如图5所示,例如,第一区域518和第二区域520两者都包括沿其长度的螺旋槽或狭缝528。第二区域520包括朝向天线104的远侧尖端110的更多数量的螺旋槽528,以增加流体导管504
沿流体导管504的该部分的柔性。螺旋槽528的数量在第二区域520的长度上以及在从第二区域520到第一区域518的过渡部上向近侧减少,使得流体导管504沿流体导管504的该部分保持更大量的硬度和/或可恢复的柔性,和/或使得第一区域518和第二区域520之间的过渡部是渐进的。
91.尽管流体导管504被展示为具有螺旋槽528,但根据本技术的其他实施例配置的流体导管可以包括其他形状和/或图案的狭槽。例如,图6a是具有呈离散狭缝形状的多个狭槽628a的图案化流体导管604a的侧视图。作为另一个示例,图6b是具有呈矩形切口形状的多个狭槽628b的图案化流体导管604b的侧视图。狭槽628a(图6a)和狭槽628b(图6b)两者都是以“h”形图案分别切入流体导管604a和604b中的。其他图案(例如,螺旋形、之字形、直线形等)当然是可能的,并在本技术的范围内。
92.再次参考图5,在一些实施例中,狭槽528的图案化可以被配置为加强沿柔性器械100和/或护套502的薄弱点。例如,与柔性器械100的其余部分相比,包含凹槽124和插入件128的柔性器械100的部分可以相对薄弱。因此,流体导管504可以在柔性器械100的那些部分附近包括较少或没有狭槽528。此外,可以利用图案化的狭槽来在由不同材料制成的部件之间产生更渐进的过渡,以减少或消除与这些点相关联的薄弱点。
93.在一些实施例中,狭槽528中的一个或多个可以用作流体514离开流体导管504并进入中心腔508(反之亦然)的出口点。例如,在将护套502和柔性器械100输送到患者体内的目标部位期间,流体514可以被输送到中心腔508。在这些实施例中,流体514可以离开狭槽528中的一个或多个并填充中心腔508,从而在患者解剖结构的导航期间增加护套502和/或柔性器械100的硬度,并减少护套502和/或柔性器械100在刺穿操作期间发生屈曲或扭结的可能性。此外,或可替代地,可以在第一区域518的全部或一部分和/或第二区域520的全部或一部分的外部上层压热缩材料(未示出),以防止流体514进入或退出流体导管504中的狭槽528中的一个或多个。
94.尽管关于图3至图6b描述的能量输送系统300-500是流体冷却系统,但在其他实施例中,本文中描述的能量输送系统可以使用其他技术进行冷却,或者可以是非冷却系统。例如,非冷却的能量输送系统可以包括插入护套(例如,图3的护套302、图4的护套402或图5的护套502)中的柔性器械(例如,图1的柔性器械100或图2的柔性器械200),而没有任何流体导管或其他冷却部件。可选地,非冷却能量输送系统可以包括其自身没有任何护套的柔性器械(例如,图1的柔性器械100或图2的柔性器械200)。
95.图7是展示了根据本技术的实施例的用于制造能量输送系统的方法700的流程图。方法700被展示为一组步骤、操作或过程710-780,并在额外参考图1的情况下描述。从步骤710开始,方法700包括在用于传输能量的细长装置(例如,同轴电缆)的至少一部分上应用封套层(例如,封套层122)。该细长装置可以包括内导体(例如,内导体116)、绝缘层(例如,绝缘层120)和包围内导体的外导体(例如,外导体118)。如前所述,封套层可以由各种材料形成,诸如塑料、pet涂层或热缩材料。封套层可以作为单层材料应用,或可以通过编织多丝层、包裹带状层或热缩材料来在多层中应用。此外,如上所讨论,封套层可以足够薄(例如小于或等于25微米),使得细长装置的总直径保持足够小,以导航经过狭窄和/或曲折的通路,同时也避免干扰围绕装置的冷却剂流动。在细长装置是包括外导体上的厚材料层(例如大于25微米)的同轴电缆的实施例中,步骤710可以包括在应用薄封套层之前去除厚材料层。
96.在一些实施例中,封套层在外导体的整个长度上形成。然而,在其他实施例中,封套层可以只在外导体的一部分上形成。例如,封套层可以只位于外导体的远侧区域处。作为另一个示例,封套层可以在要形成凹槽的位置或其附近被定位到外导体的离散区域。
97.在步骤720,方法700包括在细长装置(例如,同轴电缆)中形成一个或多个凹槽(例如,凹槽124a、124b)以形成天线体(例如,天线体112)。例如,(多个)凹槽可以通过切割或以其他方式去除被封套层覆盖的外导体的一部分,以及外导体的一部分上的封套层的对应部分来形成。封套层可以防止编织的、包裹的或箔制材料的层在切割期间折断或松开。在一些实施例中,外导体的各层可被额外剥离,以暴露出绝缘层。可选地,接近外导体的一部分的绝缘层的对应部分可以被去除。(一个或多个)凹槽可以使用切割工具(例如刀片)、激光或任何其他合适的技术来形成。可选地,步骤720可以包括在天线体中形成多个凹槽(例如,两个、三个、四个或更多个凹槽)。(一个或多个)凹槽的数量、位置和几何形状可以被配置为产生所期望的能量辐射图案,如前所述。
98.在步骤730,插入件(例如,插入件128)被定位在每个凹槽内。在一些实施例中,插入件是预先形成的部件(例如,狭长管),其形状适合于凹槽内。例如,管可以滑过天线体并放入凹槽内。在此类实施例中,插入件可以通过粘合剂和/或通过在插入件上定位一层材料(例如,屏障层130)来固定在凹槽内。在其他实施例中,插入件可由填充材料(例如,塑料珠、胶水、可流动材料)形成,这些材料被引入凹槽中并随后被固定在适当位置(例如,通过固化、硬化、胶合、粘合等)。在天线体包括多个凹槽的实施例中,可以在每个凹槽内定位插入件。
99.在可选步骤740,可以通过焊接或其他合适的技术将导电材料(例如,帽状结构114或导电材料250(图2))耦连到或形成在天线体的远侧尖端部分(例如,远侧尖端部分126)上。导电材料可以在远侧尖端部分处耦连到或形成在天线体的内导体上。例如,当在细长装置的远侧尖端部分处切割凹槽(例如远侧尖端部分126的凹槽124a)时,内导体的一部分可以暴露以向远侧延伸越过远侧尖端部分。由管形成的导电材料可以围绕暴露的内导体放置并焊接,或者围绕内导体形成并焊接。可选地,导电材料也可以在远侧尖端部分处耦连到或形成在天线体的外导体上,以使内导体与外导体电耦合(例如,电短路)。导电材料可以具有被配置为影响由天线体产生的能量辐射图案的几何形状,如前所述。
100.在步骤750,屏障层(例如,屏障层130)可以被定位在天线组件(例如,天线组件104)上,该天线组件包括天线体、插入件和导电材料。屏障层可以将插入件固定在凹槽内,并将导电材料固定到内导体和天线体。另外,屏障层还可以至少定位在插入件和凹槽上以防止流体迁移到天线体中。在一些实施例中,屏障层还在天线组件的远侧尖端上延伸,以防止流体经由远侧尖端向内迁移。可选地,屏障层可以在天线组件的整个长度上延伸。屏障层也可以在能量输送系统的其他部分上延伸,诸如传输构件(例如,传输构件102)的一部分或传输构件的整个长度上。屏障层可以作为热缩管应用,在天线组件/传输构件上加热并融化,或者作为涂层(例如,聚对二甲苯涂层或气相沉积涂层)应用。在一些实施例中,屏障层可以在多层中应用,包括第一层以将插入件和导电材料固定到天线组件,以及第二层,其应用在第一层上以确保密封从而防止流体迁移到天线体中。可选地,在应用屏障层后,导电材料的一部分(例如,导电材料的远端)用塞子密封或以其他方式耦连到塞子。塞子可以由非导电材料制成,诸如胶水或另一种粘合剂、保形涂层(诸如聚对二甲苯涂层或气相沉积涂
层)或可回流材料。塞子可以放置在屏障层内,使得屏障层部分或全部地在导电材料和塞子上延伸。
101.在可选步骤760,柔性器械(例如柔性器械100或200(图2))可被插入护套(例如分别为图3、图4或图5的护套302、402或504)中。柔性器械可以包括天线组件、传输构件和屏障层。在可选的步骤770,一个或多个流体导管(例如,流体导管304、404、504、604a、604b)可以插入护套中。在一些实施例中,步骤760和770可以同时执行。在步骤780,近端部件,诸如流体冷却系统的部件(例如,流体冷却系统306、406或506)或其他部件,诸如手柄、连接器等,可以耦连到柔性器械的近端部分。
102.尽管以特别的顺序讨论和展示了方法700的步骤,但图7中展示的方法700不如此受限制。在其他实施例中,例如,方法700可以以不同的顺序执行(例如,步骤740可以在步骤720和/或步骤730之前执行)。在这些和其他实施例中,方法700的步骤中的任一个可以在方法700的其他步骤中的任一个之前、期间和/或之后执行。此外,相关技术领域的普通技术人员将认识到,所展示的方法700可以被改变,并且仍然保持在本技术的这些和其他实施例内。例如,在一些实施例中,图7中展示的方法700的一个或多个步骤可以被省略(例如,步骤740、760和/或770)和/或重复。例如,在能量输送系统为非冷却系统的实施例中,可以省略步骤770。可选地,在柔性器械打算在没有护套的情况下使用的实施例中,可以省略步骤760和770。
103.图8是展示了根据本技术的实施例的操作能量输送系统的方法800的流程图。方法800被展示为一组步骤、操作或过程810-850。在一些实施例中,步骤810-850中的一个或多个可以至少部分地以存储在非暂时性的、有形的机器可读介质上的可执行代码的形式实施。方法800的步骤810-850的全部或子集可以至少部分地由能量输送系统的各种部件或装置执行,诸如上面关于图1至图6b描述的实施例中的任一个。例如,步骤810-850的全部或子集可以至少部分地由以下的部件或装置执行:(i)柔性器械、(ii)天线组件、(iii)传输构件、(iv)一个或多个流体导管和/或(v)流体冷却系统。此外或可替代地,方法800的步骤810-850的全部或子集可以至少部分地由能量输送系统的操作者(例如医生、用户等)执行,和/或由机器人控制的手术系统经由操作者通过用户输入装置的用户输入,或通过使用闭环控制和/或通过机器人控制的手术系统的处理器的预编程指令来自动执行。此外,方法800的步骤810-850中的任何一个或多个可以根据上述讨论执行。
104.方法800在步骤810开始,其中将能量输送系统(例如,分别为图3、图4或图5的能量输送系统300、400或500)输送到患者解剖结构内的目标部位处或附近。目标部位可以在患者的肺部气道内。在一些实施例中,目标部位是气道内的肿瘤或另一个解剖区域。如上所述,输送能量输送系统可以包括在复杂、曲折的患者解剖结构中进行导航,直到能量输送系统的远侧部分处于所期望位置,并然后将能量输送系统朝向目标部位或肿瘤取向。在一些实施例中,能量输送系统的输送可以手动进行,能量输送系统可以由用户控制通过输入装置进行机器人控制,或能量输送系统可以使用来自机器人系统的预编程指令集自动进行机器人控制,诸如下面详细描述的机器人医疗系统。在一些实施例中,能量输送系统在单独的手动装置内或与机器人医疗系统一起输送。
105.在步骤820,一旦能量输送系统的远侧部分在气道内被适当地定位和取向,方法800可以可选地包括输送冷却剂(例如,分别为图3、图4或图5的流体314、414或514)以冷却
柔性器械的至少一部分(例如,到远侧部分和/或到天线组件)。冷却剂可用于冷却柔性器械的天线组件(例如,天线组件104)。冷却剂也可以被循环以从目标部位处的组织和/或从柔性器械的传输构件(例如,传输构件102)中散热。在一些实施例中,柔性器械被定位在护套的中心腔(例如,分别为图3、图4或图5的中心腔308、408或508)内,并且流体冷却系统(例如,流体冷却系统306、406或506)和/或一个或多个流体导管(例如,流体导管304、404、504、604a、604b)可用于在柔性器械的远侧尖端(例如,图3、图4或图5的远侧尖端110)附近输送冷却剂。冷却剂可以围绕远侧尖端循环,并通过中心腔返回以离开护套。在一些实施例中,冷却剂可以经由图案化的一个或多个狭槽输送到流体导管中,和/或经由在护套内的图案化的一个或多个狭槽从护套中清除。在一些实施例中,步骤820可以与步骤810同时执行。在可替代实施例中,步骤820可以在步骤810之前执行,例如在能量输送之前立即执行,在能量输送系统朝向目标定位时立即执行,或者在能量输送系统插入到患者解剖结构中之前的设置阶段期间执行。此外,在能量输送系统为非冷却系统的实施例中,可以省略步骤820。
106.在步骤830,方法800可选地包括将能量输送系统插入组织中。例如,步骤830可以包括用包含柔性器械的护套的尖端区段(例如,分别为图3、图4或图5的尖端区段312、412或512)刺穿气道壁,并将包含天线组件的护套的部分定位在目标部位处(例如,在目标肿瘤或病变内)。可替代地,柔性器械可用于刺穿气道壁而不使用任何护套。如上所解释,柔性器械和/或护套的远端部分可以有足够的轴向刚性来刺穿组织而不发生屈曲或扭结。例如,可通过用插入件(例如插入件128)和/或一个或多个材料层(例如封套层122、屏障层130)加强天线组件,来提高柔性器械的刚性,如前所述。在可替代实施例中,可使用单独的刺穿装置诸如针头对气道壁进行初始刺穿。针头可以被去除,并且能量输送系统可以插入由针头在气道壁中产生的开口中。在一些实施例中,能量输送系统的定位可以手动执行,能量输送系统可以由用户控制通过输入装置进行机器人控制,或能量输送系统可以使用来自机器人系统的预编程指令集自动进行机器人控制。在一些实施例中,能量输送系统在单独的输送装置内输送,诸如手动柔性装置或由机器人医疗系统控制的柔性装置。机器人医疗系统的输送装置可以以固定的姿势指向目标部位,并且能量输送系统可以通过输送装置插入,以插入在组织内。在一些实施例中,步骤830可以在步骤820之前或同时执行。
107.在步骤840,方法800继续通过传输构件向天线组件输送能量(例如,使用电耦合到传输构件的发电机)以消融目标部位(例如,肿瘤)处的组织。一旦消融完成(例如,一旦肿瘤/病变和组织边缘被充分消融,如传感器反馈所确认,诸如阻抗、温度、成像和/或类似物,或一旦预先确定的时间段已过),方法800继续到步骤850。在步骤850,一旦消融完成,可以终止消融能量输送,可以终止冷却剂输送,和/或能量输送系统可以缩回并从患者解剖结构中去除。在一些实施例中,能量输送系统可以手动缩回,能量输送系统可以由用户控制通过输入装置进行机器人缩回,或能量输送系统可以自动进行机器人缩回。
108.尽管以特别的顺序讨论和展示了方法800的步骤,但图8中展示的方法800不如此受限制。在其他实施例中,方法800可以以不同的顺序执行。在这些和其他实施例中,方法800的步骤中的任一个可以在方法800的其他步骤中的任一个之前、期间和/或之后执行。此外,相关技术的普通技术人员将认识到,所展示的方法800可以被改变,并且仍然保持在本技术的这些和其他实施例内。例如,在一些实施例中,图8中展示的方法800的一个或多个步骤可以被省略和/或重复。
109.图9a至图14b展示了根据本技术的实施例配置的额外的能量输送系统,并且可以包括与上述能量输送系统类似或相同的多个特征、材料和/或部件。例如,图9a是根据本技术的各种实施例配置的用于组织消融的能量输送系统900的透视图。如图9a所示,能量输送系统900一般包括柔性器械902和流体冷却系统932。柔性器械902包括天线904和定位在护套924内的细长传输构件906。天线904在近端部分908和远端部分910之间从细长传输构件906向远侧延伸。细长传输构件906包括至少部分地包围内导体916的外导体912,以及基本上包围内导体916的绝缘体914(例如,电介质层),以使外导体912与内导体916绝缘。在所展示的实施例中,绝缘体914和内导体916的一部分918向远侧延伸越过外导体912并形成天线904的一部分。此外,细长传输构件906被展示为同轴电缆,但为了简单起见,可以不展示封套层和其他细节。例如,在一些实施例中,传输构件906可以进一步包括包围外导体912的保护层或绝缘层(未示出)(例如,以向外导体912提供结构完整性)。也可以使用具有内导体、外导体和电介质层的不同配置、形状等的其他同轴电缆配置。在可替代实施例中,任何类型的细长传输构件906可用于柔性器械902。
110.根据本技术的实施例,天线904可以是本领域中已知的各种类型的天线中的一种。例如,天线904可以是螺旋偶极子天线,如以下专利申请中更详细地示出和描述:提交于2019年10月31日公开了“coiled dipole antenna(螺旋偶极子天线)”的美国专利申请序列号16/670,847,或提交于2019年10月31日公开了“coiled antenna with fluid cooling(具有流体冷却的盘状天线)”的美国专利申请序列号16/670,947,它们的全部内容通过引用并入本文。在其他实施例中,天线904可以是以下专利申请中更详细地示出和描述的图案化管天线:提交于2019年3月28日,公开了“systems and methods related to flexible antennas(与柔性天线相关的系统和方法
)”的pct专利申请号pct/us19/24564,其全部内容通过引用并入本文。在其他实施例中,天线904可以是双螺旋、狭槽、双狭槽、单极子、实心管或另一种类型的天线。在所展示的实施例中,天线904沿纵向轴线a延伸,并包括内导体916的向远侧延伸越过外导体912的部分918。天线904可用于辐射微波能量,以用于在组织消融过程中使用。更具体地说,天线904用于在一米至一毫米的波长范围内,以及在大约300兆赫(mhz)至300吉赫(ghz)的频率范围内(例如,微波)产生电磁辐射。在一些实施例中,由天线904辐射的微波的波长和频率可以被修改,以在消融目标部位处引起所期望类型的消融。
111.在一些实施例中,绝缘体914的材料可被选择为沿轴线a提供高的轴向硬度,以允许更大的刚性来刺穿组织。例如,可以使用刚性材料,如peek或聚醚酰亚胺(诸如由沙特阿拉伯利雅得的sabic公司制造并以ultem商标出售的那些),以增加天线的硬度,并防止在刺穿操作期间发生屈曲或扭结。
112.图9b是沿图9a的线9b-9b截取的能量输送系统900的横截面端视图。一起参考图9a和图9b,在一些实施例中,能量输送系统900可以包括沿柔性器械902延伸的屏障层926,产生屏障或密封以防止流体向内迁移。屏障层926可以由热塑性塑料形成,诸如聚对苯二甲酸乙二醇酯(pet)或其他柔性和流体绝缘和不可渗透的材料。屏障层926可以很薄,并围绕柔性器械902的部件形成配合,或者可以保持柔性管状的形式。在一些实施例中,屏障层926可以提供额外的刚性以支持天线904。
113.在所展示的实施例中,天线904和传输构件906设置在护套924内。在一些实施例中,护套924是封闭的,密封的,或以其他方式限制流体进入或离开护套924。例如,护套924
可以可选地在护套924的远端927(图9a)处与尖端区段966(图9a)耦连和/或由其密封。护套924和尖端区段966可以分别与图3的护套302和尖端区段166相同或大致类似。
114.室或通道928在护套924和屏障层926之间形成,并接收冷却剂(例如,流体930(图9a)或其他冷却剂,诸如气体)以冷却柔性器械902。流体930可以是例如水或盐水溶液。流体930可以从耦连到通道928的流体冷却系统932(图9a)提供给通道928。流体冷却系统932可以与图3的流体冷却系统306相同或大致类似。在所展示的实施例中,流体冷却系统932还包括或耦连到流体导管936和937(图9b),该导管延伸穿过通道928的至少一部分并在护套924内至少与传输构件906(图9a)并排行进。冷却剂可在通道928内被引导通过流体导管936和/或通过流体导管937。例如,流体导管936、937中的每个可与图3的流体导管304相同或大致类似。
115.流体导管936和/或流体导管937可用于例如向通道928提供流体930的流入。流体930可以在通道928内绕天线904和/或传输构件906循环,并且可以在通道928内在近侧方向上返回,以在储存器(未示出)中净化或净化到环境中。在另一个实施例中,流体930可以经由护套924中的开口或狭缝离开护套924,或者经由通道928和/或另一个流体导管(未示出)返回到流体冷却系统932。可替代地,流体导管936和/或937可以通过中断来自流体储存器934的入口流体,使流动反向并使用流体冷却系统向流体导管936和/或937提供抽吸,来用于提供流体930从通道928的回流。在另一个实施例中,可以提供单独的流体导管(未示出),该导管不提供流体930的流入并且仅用于回流。在一些实施例中,回流可以在近侧方向上通过通道928的流动、通过流体导管的流动以及通过护套924中的开口的组合中进行净化。
116.在所展示的实施例中,流体导管936和937彼此分离,使得当柔性器械被导航到目标时,每个导管可以彼此独立地挠曲。在一些实施例中,单独流体导管比彼此附接的流体导管提供更大的可恢复柔性和/或轴向刚性。然而,在本技术的其他实施例中,流体导管936和937可以彼此联接和/或可以形成为单个结构。
117.尽管在图9a和图9b中展示了能量输送系统900具有两个圆形的流体导管936和937,它们与偏心的传输构件906(图9a)并排行进,但根据本技术的其他实施例配置的能量输送系统可以包括不同数量、形状和/或位置的流体导管。例如,在一些实施例中,本技术的能量输送系统可以包括一个或三个或更多个流体导管。在一些实施例中,单个流体导管可能会导致不平衡的装置或大小要求,并且高摩擦损失(由于附加的流体导管的壁厚增加而导致的高压力下降)可能会将流体导管的数量限制在三个或更少。传输构件906可以在通道928内居中,并且流体导管可以均匀地或不均匀地围绕传输构件906分布。此外或可替代地,流体导管的全部或子集可以具有非圆形(例如,“d”形、矩形等)的横截面形状。在具有单个流体导管的一些实施例中,流体导管的形状可以是不规则的,以平衡设计的对称性。在这些和其他实施例中,至少一个流体导管可以与传输构件906同心定位(例如,包围内导体916、绝缘体914、外导体912和/或传输构件906)在护套924内,并终止于天线904的近端908或附近。流体导管936和/或937的最小壁厚可能是必要的,以防止通道928的扭结。然而,壁厚可能会限制装置内其他部件的整体横截面积,以便保持期望的总外直径。
118.如前所述,柔性器械902(以及相关联的流体导管936和937)必须具有足够的柔性,以导航经过曲折的解剖通路,并促进将柔性器械902输送到患者解剖结构内的目标部位。柔性器械902与流体导管936和937可以与上面参考图3描述的柔性器械302和(一个或多个)流
体导管304相同或大致类似,并具有许多或所有相同的特征和优点。例如,流体导管936和/或937可以由弹性柔性材料(例如,镍钛合金或另一种合适的形状记忆材料)形成。如果由镍钛合金构成,则流体导管可以被激光切割或研磨来调整流体导管936和/或937的长度上的硬度。在一些实施例中,氟化乙烯丙烯(fep)层可以包围流体导管936和/或流体导管937。在进一步的实施例中,流体导管936和/或937可以完全由聚合物材料构成(并且不包括镍钛合金)。
119.图10至图13、图14a和图14b分别是根据本技术的各种实施例配置的用于组织消融的能量输送系统1000、1100、1200、1300和1400的横截面侧视图。图10至图13、图14a和图14b的能量输送系统1000-1300和1400与图9的能量输送系统900相似,但本文中公开的差异除外。因此,相似的参考数字被用来识别图9至图14b中展示的相似元件。此外,图10至图14b在下文中各自参考单个流体导管进行了详细讨论。然而,本领域普通技术人员将很容易理解,下面描述的能量输送系统1000-1300和1400中的任一个可以包括多个流体导管,并且每个系统1000-1300和1400的流体导管的全部或子集可以共享本文中描述的流体导管的特征中的一个或多个。
120.参考图10,能量输送系统1000包括柔性器械1002,其具有天线904、细长传输构件906和设置在护套924内的流体导管1036。屏障层926沿柔性器械1002延伸,产生屏障或密封,以防止流体向内迁移。如前所述,屏障层926可以很薄,并围绕柔性器械1002的部件(例如天线904、传输构件906等)形成配合(例如热缩材料),或者可以保持柔性管状形式。
121.如上所讨论,通道928在护套924和屏障层926之间形成,并接收流体930(例如,冷却剂,诸如盐水、水或另一种冷却剂,诸如气体)的流体流动以冷却柔性器械1002。在所展示的实施例中,天线904在护套924的远端927之前终止,使得通道928包围天线904的远端部分910。在其他实施例中,天线904可以延伸到护套924的远端927,使得通道928不围绕护套924内的天线904的远端部分910。
122.流体导管1036可以与上面参考图3描述的流体导管304相同或大致相同,并且可以使用相同或类似的技术和/或材料来制造。在所展示的实施例中,例如,流体导管1036包括第一区域1031和第二区域1032。流体导管1036延伸通过通道928的至少一部分,并在护套924内与传输构件906并排行进,在天线904的远端部分910附近终止。将流体导管1036延伸到至少天线904的远端部分910可以提供额外的好处,即将冷却剂输送到天线的远端部分910以用于增加和/或更均匀地冷却天线904。此外,在天线904的近端部分908附近终止流体导管1036(如图9a所展示),使柔性器械1002的从天线904的近端部分908到护套924的远端部分927的部分不受流体导管1036支持,减少柔性器械1002沿轴线a的轴向硬度。此外,可以沿柔性器械1002在天线904的近端部分908处或附近产生薄弱点,其中流体导管1036的第一区域1031终止。此种薄弱点可以在天线904通过患者解剖结构的输送期间减少柔性器械1002的弯曲半径,并且可以增加柔性器械1002在刺穿操作期间沿无支持部分屈曲或扭结的可能性(特别是如果天线904在护套924内偏心)。
123.如前所述,形成形状记忆材料的流体导管1036可以提供(i)所需要的柔性(例如可变形性),以促进柔性器械1002通过曲折的患者解剖结构的输送,以及(ii)所需要的弹性(例如可恢复性、回弹等),以在变形后将流体导管1036(并因此将柔性器械1002)返回到其初始(例如,未变形)状态或形状,以减少轨迹误差,并在刺穿操作期间促进天线904准确地
输送到目标部位。然而,许多形状记忆和其他弹性柔性材料(包括镍钛合金)在微波天线904的频率范围内(例如300mhz至300ghz)是导电的,这意味着流体导管1036的任何区域在护套924内与天线904并排行进并且由导电材料形成,这将在能量输送期间干扰天线904。
124.因此,流体导管1036的第一区域1031可以由形状记忆材料形成,诸如镍钛合金,并沿细长传输构件906延伸,而流体导管1036的第二区域1032可以由非导电材料形成,诸如塑料或聚合物,并沿天线904延伸。如图10所展示,第一区域1031终止于沿柔性器械1002的长度靠近天线904的近端部分908的一点,使得第一区域1031在能量输送期间不干扰天线904。第二区域1032可以在天线904的远端部分910处或附近终止,或者可以延伸到护套924的远端部分927(例如,以沿柔性器械1002的整个长度提供硬度和轴向刚性)。因为流体导管1036的第二区域1032由在天线904的频率范围内非导电的材料形成,所以第二区域1032在能量输送期间不会干扰天线904。
125.图11是具有根据本技术的另一个实施例配置的柔性器械1102的能量输送系统1100的横截面图。能量输送系统1100和柔性器械1102分别类似于图10的能量输送系统1000和柔性器械1002,除了图11中展示的柔性器械1102的流体导管1136包括靠近第一区域1031的第三区域1133。
126.如图11所展示,柔性器械1102包括近侧区段1141和远侧区段1142。远侧区段1142从近侧区段1141在沿传输构件906的长度的点处向远侧延伸到天线904的至少远端部分910(例如,到护套924的远端927)。流体导管1136的第三区域1133可以沿柔性器械1102的近侧区段1141的至少一部分延伸,而流体导管1136的第一区域1031可以沿柔性器械1102的远侧区段1142的至少一部分延伸,以沿柔性器械1102的该部分提供可恢复的柔性。流体导管1136的第二区域1032可以沿天线904延伸,终止于天线904的远端部分910。在一些实施例中,流体导管1136的各个区域/区段可以使用与上面参考图4描述的那些类似或相同的材料和技术来制造。
127.图12是具有根据本技术的另一个实施例配置的柔性器械1202的能量输送系统1200的横截面图。能量输送系统1200和柔性器械1202分别类似于图9/10/11的能量输送系统900/1000/1100/1200和柔性器械902/1002/1102,不同的是图12中展示的柔性器械1202包括流体导管1236,该流体导管1236用狭槽1282(例如,切口、狭缝等)图案化。特别地,流体导管1236的第一区域1031和第二区域1032两者都包括沿其长度的狭槽1282的梯度,以改变流体导管1236的对应区域1031和1032的硬度。
128.在一些实施例中,流体导管1236的狭槽/开口可以与上面参考图5至图6b描述的狭槽大致类似或相同。此外,如上面参考图5描述,在一些实施例中,狭槽中的一个或多个可以用作冷却剂(例如,流体或气体)的出口点,以退出流体导管1236并进入通道(反之亦然)。在进一步的实施例中,如上所述的图案化狭槽可以被包括在沿柔性器械的任何薄弱点处。例如,外导体912和内导体916之间的直径变化可能导致薄弱点。在这种情况下,可以利用一组图案化狭槽以在这些部件之间产生更渐进的过渡。其他薄弱点可能发生在不同材料之间的过渡处。因此,在外导体912、内导体916、电介质材料914和/或流体导管1236的材料不均匀的实施例中,不同材料之间的任何过渡可以被认为是薄弱点并可以利用图案化狭槽使过渡渐进,从而减少或消除薄弱点。
129.图13是具有根据本技术的另一个实施例配置的柔性器械1302的能量输送系统
1300的横截面图。能量输送系统1300和柔性器械1302分别类似于图10的能量输送系统1000和柔性器械1002,不同的是图13中展示的柔性器械1302包括沿其整个长度由连续材料形成的流体导管1336。在一些实施例中,例如,流体导管1336由在天线904的频率范围内非导电的材料形成,使得流体导管1336在能量输送期间不会干扰天线904。例如,流体导管1336可以由塑料、聚合物或其他非导电材料形成。在所展示的实施例中,流体导管1336基本上沿柔性器械1302的整个长度从柔性器械1302的近端部分行进到天线904的至少远端部分910。
130.为了在通过患者解剖结构将柔性器械1302输送到目标部位期间和/或在刺穿操作期间向柔性器械1302提供可恢复的柔性和/或轴向硬度,可以将管芯针(stylet)1372插入流体导管1336的腔中(例如,经由流体导管1336的端口或阀1374)并延伸到天线904的至少远端部分910。在一些实施例中,管芯针1372可以由弹性柔性材料形成,诸如镍钛合金或另一种形状记忆材料。
131.在一些实施例中,管芯针1372和流体导管1336的大小允许在流体导管的腔内有空间,使得在管芯针1372插入流体导管1336中时,可以经由流体导管1336和/或柔性器械1302的另一个流体导管(未示出)向通道928输送或从该通道中去除冷却剂(例如冷却流体或气体)。在其他实施例中,在经由流体导管1336将冷却剂运送到通道928或从该通道运送之前,可以将管芯针1372从流体导管1336中去除。例如,一旦柔性器械1302被定位在目标部位,管芯针1372可以(例如,经由端口1374)从流体导管1336中去除,并随后冷却剂(图13中未示出)可以经由流体导管1336输送到通道928或从该通道中去除以冷却天线904,特别是在输送消融能量期间。
132.在一些实施例中,管芯针1372的近端部分可以直接或间接地连接到可滑动机构(未示出)。可滑动机构可被配置为在流体导管1336内向远侧和/或向近侧滑动管芯针1372。例如,在柔性器械1302导航之前和/或期间和/或在刺穿操作之前和/或期间,使用一个或多个致动器诸如马达和/或马达驱动的导螺杆、液压系统、马达驱动的电缆系统、机械臂和/或类似物(未示出),可滑动机构可被机器人控制以(例如,自动和/或响应于操作者命令)将管芯针1372延伸到流体导管1336中。此外,或可替代地,可滑动机构可以被机器人控制,以在柔性器械1302被定位在目标部位处后,在经由流体导管1336运送冷却剂之前,和/或在经由天线904输送能量之前,(例如,自动和/或响应于操作者命令)从流体导管1336缩回管芯针1372。
133.图14a和图14b是具有根据本技术的进一步的实施例配置的柔性器械1402的能量输送系统1400的横截面图。能量输送系统1400和柔性器械1402分别类似于图11的能量输送系统1100和柔性器械1102,不同的是图14中展示的柔性器械1402包括可在护套924内在与轴线a平行的方向上向远侧和向近侧滑动的流体导管1436。在一些实施例中,流体导管1436可以由单种材料形成,类似于图13的流体导管1336。在可替代实施例中,流体导管1436可以由一种以上的材料形成,类似于图11的流体导管1136。例如,流体导管1436可以包括由弹性柔性材料形成的第一区域(例如类似于图11的第一区域1031)、由非导电材料形成的第二区域(例如类似于图11的第二区域1032),和/或由较便宜的材料(例如,为了降低成本)形成的第三区域(例如类似于图11的第三区域1133)。在其他实施例中,并且如图14a和图14b所示,流体导管1436可以沿其整个长度由连续材料形成,诸如弹性柔性材料(例如镍钛合金或另一种合适的形状记忆材料)。
134.图14a展示了流体导管1436在完全延伸状态下的情况。特别地,流体导管1436可以在护套924内在与轴线a平行的方向上向远侧滑动,直到流体导管1436的远端部分1019被定位在护套924的远端部分927处或附近。可替代地,流体导管1436可以在护套924内向远侧滑动,直到流体导管1436的远端部分1019被定位在护套924的远端部分927的不远处(例如,在天线904的远端部分910处),以允许冷却剂从通道928进入流体导管1436/离开该流体导管到该通道中。
135.在一些实施例中,当使柔性器械1402导航通过患者解剖结构时(例如,以提供可恢复的柔性)和/或当执行刺穿操作时(例如,以提供沿轴线a的硬度并减少柔性器械1402在沿其长度的点处屈曲或扭结的可能性),流体导管1436可以被定位在完全延伸状态。在一个实施例中,当流体导管1436处于完全延伸状态时,冷却剂(例如,图14b所示的流体930或气体)可以被持续地输送到通道928,以向柔性器械1402提供额外的硬度。在其他实施例中,当流体导管1436处于完全延伸状态时,冷却剂可以间歇地输送到通道928。例如,在一个实施例中,当使柔性器械1402导航通过患者解剖结构时,不向通道928输送冷却剂以保持柔性器械1402的最大柔性,但在刺穿操作之前和/或期间向通道928输送冷却剂,以向柔性器械1402提供额外硬度。在其他实施例中,当流体导管1436处于完全延伸状态时,不向通道928提供冷却剂。
136.图14b展示了处于缩回状态的流体导管1436。特别地,流体导管1436可以在护套924内在与轴线a平行的方向上向近侧滑动,至少直到流体导管1436的远端部分1019被定位在天线904的近端部分908近侧(例如,在传输构件906的远端部分1007处或附近)。以这种方式,流体导管1436可以在护套924内缩回到流体导管1436在能量输送期间不会干扰天线904的位置。在一些实施例中,流体导管1436可以在柔性器械1402被定位在目标部位处后和/或在经由天线904输送能量之前被定位在完全缩回的状态。然后可以经由流体导管1436向通道928输送冷却剂或从该通道去除冷却剂,以在能量输送期间冷却天线904。
137.一起参考图14a和图14b,能量输送系统1400可以进一步包括呈可滑动机构1496和/或热源1498的形式的平移致动器。在一些实施例中,可滑动机构1496可以直接或间接地连接到流体导管1436的近端部分1415,并被配置为在与轴线a平行的方向上并在完全延伸和完全缩回的状态之间在封套内向远侧和/或向近侧滑动流体导管1436。例如,流体导管1436的近端部分1415可以在与轴线a平行的方向上使用一个或多个致动器而被平移,一个或多个致动器诸如马达和/或马达驱动的导螺杆、液压系统、马达驱动的电缆系统、机械臂和/或类似物(未示出)。在一些实施例中,近端部分可以安装在可滑动机构1496的线性滑轨(未示出)上。在其他实施例中,近端部分被安装到机械臂,并通过致动机械臂在平行方向上平移。在一些实施例中,可滑动机构1496可以被机器人控制(例如,自动和/或响应于操作者命令),以在柔性器械1402导航通过患者解剖结构之前和/或期间和/或在刺穿操作之前和/或期间,在护套924内向远侧滑动流体导管1436。此外,或可替代地,可滑动机构1496可以被机器人控制(例如,自动和/或响应于操作者命令),以在将柔性器械1402输送到目标部位之后,在经由流体导管1336运送冷却剂之前,和/或在经由天线904输送能量之前,在护套924内向近侧滑动流体导管1436。在一些实施例中,流体冷却系统932和近端部分1415两者都安装在可滑动机构1436上。在可替代实施例中,只有近端部分1415安装在可滑动机构上,并且顺应性耦连件(未示出)将流体导管1436耦连到流体冷却系统932,该流体冷却系统相对于
近端部分1415是固定的。
138.在这些和其他实施例中,流体导管1436可以由响应于刺激(例如,热能、热量、机械负载)而改变形状(例如,在第一配置和第二不同配置之间转变)的材料(例如,镍钛合金、形状记忆聚合物、形状记忆金属或合金)形成。例如,在一个实施例中,流体导管1436可以被锚定在近端部分处,并且可以将热量施加到流体导管1436,以使流体导管1436在护套924内向近侧转变(例如,收缩、缩回)。在一个示例中,由天线904在能量输送期间生成的热能可以激活流体导管1436的一部分,以使其在护套924内向近侧转变(缩回),达到流体导管1436不再与天线904重叠的程度。可以改变能量输送,使得第一频率范围被应用来缩回流体导管1436。随后,一旦流体导管1436被缩回到流体导管1436不与天线904重叠的位置,就应用第二频率范围以用于组织消融。作为另一个示例,热源1498可以(例如,电气地)向近端部分1415和/或向沿流体导管1436长度的一个或多个其他部分施加热量(例如,在柔性器械1402定位在目标部位处之后和/或在经由天线904输送能量之前和在经由天线904输送能量之前),以将流体导管1436在护套924内向近侧缩回到流体导管1436不与天线904重叠的程度。
139.图15是展示了根据本技术的各种实施例的用于制造能量输送系统的方法1500的流程图。方法1500被展示为一组步骤、操作或过程1502-1512。在步骤1502,方法1500开始,其中将尖端区段(例如,尖端区段966)连接到封套(例如,护套924)或从该封套形成尖端区段。在步骤1504,天线(例如,天线904)可以在传输构件(例如,传输构件906)的远端处形成和/或连接到该远端。在步骤1506,屏障层(例如,屏障层926)可以在天线和传输构件上延伸。在步骤1508,天线、传输构件和屏障层可以被插入封套的中心腔中。在步骤1510,一个或多个流体导管(例如,流体导管936、937、1036、1136、1236、1336和/或1436)可以插入封套的中心腔中,以形成柔性器械(例如,柔性器械902、1002、1102、1202、1302和/或1402)。在一些实施例中,步骤1508和1510可以同时执行。在步骤1512,近端部件(例如,流体冷却系统的部件(例如,流体冷却系统932)、可滑动机构的部件(例如,可滑动机构1496)、热源的部件(例如,热源1498)、手柄、连接器等)可以耦连到柔性器械的近端部分。
140.尽管以特别的顺序讨论和展示了方法1500的步骤,但图15中展示的方法1500不如此受限制。在其他实施例中,方法1500可以以不同的顺序执行。在这些和其他实施例中,方法1500的步骤中的任一个可以在方法1500的其他步骤中的任一个之前、期间和/或之后执行。此外,相关技术领域的普通技术人员将认识到,所展示的方法1500可以被改变,并且仍然保持在本技术的这些和其他实施例内。例如,在一些实施例中,图15中展示的方法1500的一个或多个步骤可以被省略和/或重复。
141.图16是展示了根据本技术的各种实施例的操作能量输送系统的方法1600的流程图。方法1600被展示为一组步骤、操作或过程1601-1612。在一些实施例中,步骤1601-1612中的一个或多个可以至少部分地以存储在非暂时性、有形、机器可读介质上的可执行代码的形式实施。方法1600的步骤1601-1612的全部或子集可以至少部分地由能量输送系统的各种部件或装置执行,诸如上面关于图9至图15描述的能量输送系统中的任一个。例如,步骤1601-1612的全部或子集可以至少部分地由以下部件或装置执行:(i)流体冷却系统,(ii)柔性器械,(iii)传输构件,(iv)天线,(v)一个或多个流体导管,(vi)管芯针,(vii)平移驱动器,(viii)可滑动机构,和/或(ix)热源。此外或可替代地,方法1600的步骤1601-1612的全部或子集可以至少部分地由能量输送系统的操作者(例如,医生、用户等)执行,
和/或由机器人控制的手术系统经由操作者通过用户输入装置的用户输入,或通过使用闭环控制和/或通过机器人控制的手术系统的处理器的预编程指令来自动执行。此外,方法1600的步骤1601-1612中的任何一个或多个可以根据上述讨论执行。
142.方法1600在步骤1601开始,其中将滑动元件定位在柔性器械内的完全延伸位置。如前所讨论,在患者解剖结构的导航期间,柔性器械的至少一个远侧区段会发生大量变形。因此,柔性器械必须有足够的柔性来导航经过患者的解剖结构,但又有足够的弹性在变形后返回到初始(例如,未变形)状态或形状。因此,将滑动元件定位在柔性器械内完全延伸的位置,向柔性器械提供可恢复的柔性。例如,滑动元件可以包括可滑动地设置在柔性器械封套内的流体导管。向柔性器械提供可恢复的柔性可以包括在封套内滑动流体导管(例如,使用连接到流体导管的近端部分的电动可控制滑动机构),直到流体导管的弹性柔性区域与柔性器械的远侧区段的部分对准。在又一个实施例中,滑动元件可以包括管芯针。例如,向柔性器械提供可恢复的柔性可以包括将由弹性柔性材料形成的管芯针插入和/或滑动到流体导管的腔内(例如,使用连接到管芯针的近端部分的电动可控制滑动机构)。在该示例中,流体导管可以沿柔性器械的远侧区段固定地定位,而管芯针在流体导管内可滑动地延伸。
143.方法1600在步骤1602继续,其中将柔性器械的远侧部分输送到患者气道内的目标部位或附近。如上所述,输送柔性器械包括导航经过复杂、迂回的患者解剖结构,直到柔性器械的远侧部分处于所期望位置,并然后将柔性器械朝向目标部位或肿瘤取向。在一些实施例中,柔性器械的输送可以手动执行,柔性器械可以由用户控制通过输入装置进行机器人控制,或者柔性器械可以使用来自机器人系统的预编程指令集自动进行机器人控制。
144.在步骤1603,一旦柔性器械的远侧部分在气道内被适当地定位和取向,方法1600可以可选地包括输送冷却剂(例如,冷却流体或其他冷却剂,诸如气体)或增加被输送的冷却剂的量以增加柔性器械的刚性。例如,可以使用流体冷却系统和/或柔性器械的一个或多个流体导管将冷却剂输送到通道和/或从通道中去除。在一些实施例中,输送冷却剂可以包括经由图案化到流体导管中的一个或多个狭槽向通道输送冷却剂或从通道中去除冷却剂。
145.冷却剂输送可以由流体冷却系统基于柔性器械的检测位置自动触发和控制,或者可以基于用户输入来触发和控制。例如,当检测到柔性器械已到达目标部位或检测到柔性器械朝向目标肿瘤取向时,冷却剂可以自动输送。在另一个示例中,冷却剂可以在将柔性器械定位在目标部位处之前和/或同时通过通道输送。在该示例中,可以输送冷却剂以向柔性器械提供额外的硬度和/或防止柔性器械在输送期间屈曲或扭结。因此,冷却剂的体积可以基于柔性器械通过目标路径的检测到的位置而变化。例如,当柔性器械围绕狭窄的弯曲导航时,通过通道输送的冷却剂的体积可以减少,和/或当柔性器械进入小直径结构或穿透组织时,通过通道输送的冷却剂的体积可以增加(如下面在步骤1604期间所描述的)。此外,如下面详细描述的,冷却剂也可以通过通道被循环,以冷却柔性器械的天线。冷却剂也可以被循环,以从目标部位处的组织和/或从耦连到天线的传输构件中散去热量。
146.在步骤1604,方法1600包括用柔性器械的远端部分刺穿气道壁,并将柔性器械的天线定位在目标部位处(例如,在目标肿瘤或病变内)。如上所解释,柔性器械的远端部分必须有足够的刚性(轴向),以刺穿组织而不发生屈曲或扭结,并且在一些示例中可以使用增加冷却剂输送来使其更刚性。在一些实施例中,柔性器械的定位可以手动执行,柔性器械可以由用户控制通过输入装置进行机器人控制,或者柔性器械可以使用来自机器人系统的预
编程指令集自动进行机器人控制。
147.一旦天线被定位在肿瘤(或其他目标组织)内,方法1600在步骤1605继续进行滑动元件的近侧缩回。在一些实施例中,例如,滑动元件是流体导管,它可以缩回,至少直到流体导管的远端被定位在天线近端的近侧,使得流体导管在能量输送期间不干扰天线,但流体导管仍然在柔性器械内以用于冷却剂输送。在另一个实施例中,滑动元件是管芯针,其可以缩回,直到管芯针从流体导管内去除或至少缩回,从而允许冷却剂经由流体导管被运送到柔性器械的远侧部分。在一些实施例中,流体导管和/或管芯针可以连接到可滑动机构(例如,在流体导管和/或管芯针的近端部分处的可控制机构)。在这些实施例中,流体导管和/或管芯针可以使用可滑动机构在封套内向近侧滑动。在这些和其他实施例中,在流体导管由形状记忆材料构成的情况下,流体导管可以通过沿流体导管的长度向流体导管的近端部分和/或一个或多个其他部分施加能量(例如热能)(例如使用热源)而在封套内向近侧缩回。在一些实施例中,滑动元件的缩回可以手动执行,滑动元件可以由用户控制通过输入装置进行机器人缩回,或者滑动元件可以基于对目标肿瘤内的天线的检测自动进行机器人缩回。
148.在步骤1606,方法1600继续,其中通过传输构件向天线输送能量(例如,使用与传输构件电耦合的发电机)以消融目标部位(例如,肿瘤)处的组织,并且在步骤1607,方法1600包括输送冷却剂(或继续/增加冷却剂输送)。虽然在所展示的实施例中,能量输送在冷却剂输送之前执行,但在各种实施例中,冷却剂输送可以在能量输送之前执行,或者能量输送和冷却剂输送可以同时执行。在各种实施例中,能量输送的速率、冷却剂的输送流速和冷却剂的排空流速可以由操作者选择进行控制,或者在计算机处理器的控制下,基于传感器反馈(例如,用于检测组织消融效果的所测量的阻抗、温度、成像信息和/或诸如此类)以闭环方式自动改变。在一些实施例中,在流体导管由形状记忆材料构成的情况下,由天线生成并施加到流体导管的一部分的热量可以使流体导管在柔性器械的封套内向近侧收缩(例如,缩回、萎缩等),至少直到流体导管的导电区域被定位在封套内天线近端的近侧。在该实施例中,可以改变冷却剂输送以保持流体导管的温度,并因此保持流体导管的收缩长度到期望位置。此外,如前所述,并如将在下面更详细地描述,冷却剂可被循环,以从目标部位处的组织和/或从耦连到天线的传输构件中散去热量。
149.在一些实施例中,方法1600可以可选地包括步骤(例如,步骤1608-1611),以用于测量温度并(按需要)以闭环方式改变冷却剂输送,以保持天线的温度,从而防止过热和对天线的损坏。例如,在步骤1608,方法1600可以包括测量天线和/或目标部位处或附近的温度。在决策块1609,如果测量的温度高于第一阈值温度或温度范围(例如,110摄氏度至130摄氏度,或约120摄氏度),则方法1600包括增加冷却剂输送(步骤1610),并然后返回步骤1608以用于另一次温度测量。如果测量的温度不高于第一阈值温度,则方法包括维持冷却剂输送(步骤1611)并返回到步骤1608。方法在循环内继续进行,返回到步骤1608以用于另一次温度测量,直到消融的能量输送完成。如上所述,该闭环过程是方法1600的可选部分,其可能不包括在本技术的一些实施例中。
150.一旦消融完成(例如,一旦肿瘤/病变和组织边缘被充分消融,如通过传感器反馈诸如阻抗、温度、成像和/或诸如此类所确认的,或一旦预先确定的时间段已过),则方法1600继续到步骤1612。在步骤1612,可以终止消融能量输送,可以终止冷却剂输送,和/或柔
性器械可以缩回并从患者解剖结构中去除。在一些实施例中,在要在额外的目标部位处执行额外消融的情况下,在将柔性器械重新定位在下一个目标部位处之前,可以将滑动元件重新定位到完全延伸的位置。然而,如果没有额外目标要消融,则在柔性器械从患者解剖结构中缩回期间,可能没有必要将滑动元件重新定位在软性器械内。在一些实施例中,柔性器械可以手动缩回,柔性器械可以由用户控制通过输入装置进行机器人缩回,或者柔性器械可以自动进行机器人缩回。
151.尽管方法1600的步骤以特别的顺序讨论和展示,但图16中展示的方法1600不如此受限制。在其他实施例中,方法1600可以以不同的顺序执行。在这些和其他实施例中,方法1600的步骤中的任一个可以在方法1600的其他步骤中的任一个之前、期间和/或之后执行。例如,步骤1607可以在方法1600的其他步骤中的任一个之前、期间和/或之后执行。此外,相关技术领域的普通技术人员将认识到,所展示的方法1600可以被改变,并且仍然保持在本技术的这些和其他实施例内。例如,在一些实施例中,图16中展示的方法1600的一个或多个步骤可以被省略和/或重复。作为具体的示例,一些实施例中的柔性器械可以包括固定地定位在封套内的流体导管(例如,图10的流体导管1036或图11的流体导管1136),使得流体导管的弹性柔性区域沿天线器械的远侧区段的一部分永久定位。在这些实施例中,可以省略步骤1601和1605。在其他实施例中,可以省略步骤1603、1607、1608、1609、1610和/或1611。
152.虽然在各种实施例中,所描述的能量输送系统中的任一个可用作手动输送的医疗器械,但在其他实施例中,能量输送系统中的任一个可用作由机器人远程操作和/或非远程操作的医疗系统输送、耦连到该医疗系统和/或由该医疗系统控制的医疗器械。例如,图17是根据本技术的各种实施例配置的远程操作医疗系统1700(“医疗系统1700”)的简化图。在一些实施例中,医疗系统1700可适用于例如手术、诊断、治疗或活检程序中。虽然本文中关于此类程序提供了一些实施例,但对医疗或手术器械和医疗或手术方法的任何提及都是非限制性的。本文中描述的系统、器械和方法可用于动物、人类尸体、动物尸体、人类或动物解剖结构的部分、非手术诊断,以及工业系统和一般机器人或远程操作系统。
153.如图17所示,医疗系统1700一般包括操纵器组件1702,以用于操作医疗器械1704对定位在桌子t上的患者p执行各种程序。在一些实施例中,医疗器械1704可以包括、输送、耦连到和/或控制本文中描述的柔性器械中的任一个。操纵器组件1702可以是远程操作的、非远程操作的或混合远程操作和非远程操作的组件,其中选择可以机动化和/或远程操作的运动自由度,并且选择可以非机动化和/或非远程操作的运动自由度。
154.医疗系统1700进一步包括主组件1706,该主组件具有一个或多个控制装置,以用于控制操纵器组件1702。操纵器组件1702支持医疗器械1704,并可以可选地包括多个致动器或马达,其响应于来自控制系统1712的命令来驱动医疗器械1704上的输入。致动器可以可选地包括驱动系统,该驱动系统当其在耦连到医疗器械1704时可将医疗器械1704推进到自然或手术创造的解剖孔口中。其他驱动系统可以在多个自由度中移动医疗器械1704的远端,这可以包括三个线性运动度(例如,沿x、y和z笛卡尔轴线的线性运动)和三个旋转运动度(例如,绕x、y和z笛卡尔轴线的旋转)。此外,致动器可用于致动医疗器械1704的可铰接末端执行器,以用于在活检装置和/或类似物的钳口中抓取组织。致动器位置传感器,诸如分解器、编码器、电位计和其他机构,可向医疗系统1700提供描述马达轴的旋转和取向的传感器数据。该位置传感器数据可用于确定由致动器操纵的物体的运动。
155.医疗系统1700还包括显示系统1710,以用于显示由传感器系统1708的子系统生成的手术部位和医疗器械1704的图像或表示,和/或与程序有关的任何辅助信息,包括与消融有关的信息(例如,温度、阻抗、能量输送功率水平、频率、电流、能量输送持续时间、组织消融的指标等)。显示系统1710和主组件1706可以被取向,因此操作者o可以用远程呈现的感觉来控制医疗器械1704和主组件1706。
156.在一些实施例中,医疗器械1704可以包括成像系统的部件,该成像系统可以包括成像范围组件或成像器械,其记录手术部位的并发或实时图像,并通过医疗系统1700的一个或多个显示器,诸如显示系统1710的一个或多个显示器向操作者o提供图像。并发图像可以是例如由定位在手术部位内的成像器械捕获的二维或三维图像。在一些实施例中,成像系统包括内窥镜成像器械部件,这些部件可以整体地或可去除地耦连到医疗器械1704。然而,在一些实施例中,附接到单独操纵器组件的单独内窥镜可与医疗器械1704一起用于对手术部位成像。在一些实施例中,成像系统包括通道(未示出),该通道可提供器械、装置、导管和/或本文中描述的柔性器械的输送。成像系统可以实施为硬件、固件、软件或其组合,它们与一个或多个计算机处理器交互或以其他方式由该处理器执行,该处理器可以包括控制系统1712的处理器。
157.医疗系统1700还可以包括控制系统1712。控制系统1712包括至少一个存储器和至少一个计算机处理器(未示出),以用于实现对医疗器械1704、主组件1706、传感器系统1708和显示系统1710之间的控制。控制系统1712还包括编程指令(例如,存储指令的非暂时性机器可读介质),以实施根据本文中公开的方面描述的方法中的一些或全部,包括用于向显示系统1710提供信息的指令。
158.控制系统1712可以可选地进一步包括虚拟可视化系统,以在图像引导的手术程序期间控制医疗器械1704时向操作者o提供导航帮助。使用虚拟可视化系统的虚拟导航可以基于参考解剖通路的所获得的术前或术中数据集。虚拟可视化系统处理使用成像技术成像的手术部位的图像,诸如计算机断层扫描(ct)、磁共振成像(mri)、荧光检查、热摄影、超声波、光学相干断层扫描(oct)、热成像、阻抗成像、激光成像、纳米管x射线成像和/或诸如此类。
159.图18a是根据本技术的各种实施例配置的医疗器械系统1800的简化图。医疗器械系统1800包括细长柔性装置1802,诸如柔性导管,其耦连到驱动单元1804。细长柔性装置1802包括具有近端1817和远端或尖端部分1818的柔性体1816。医疗器械系统1800进一步包括跟踪系统1830,以用于使用一个或多个传感器和/或成像装置确定远端1818和/或一个或多个节段1824沿柔性体1816的位置、取向、速度、姿势和/或形状,如下面进一步详细描述。
160.跟踪系统1830可以可选地使用形状传感器1822跟踪远端1818和/或节段1824中的一个或多个。形状传感器1822可以可选地包括与柔性体1816对准的光纤(例如,提供在内部通道内(未示出)或安装在外部)。形状传感器1822的光纤形成光纤弯曲传感器以用于确定柔性体1816的形状。在一个可替代方案中,包括光纤布拉格光栅(fbg)的光纤被用来在一个或多个维度中提供结构中的应变测量。用于监测光纤在三维中的形状和相对位置的各种系统和方法在以下专利中描述:提交于2006年9月26日公开了“fiber optic position and shape sensing device and method relating thereto(光纤位置和形状感测装置及其相关方法)”的美国专利号7,781,724;提交于2008年3月12日标题为“基于瑞利散射的光纤位
置和/或形状感测(fiber optic position and/or shape sensing based on rayleigh scatter)”的美国专利号专利号7,772,541;以及提交于2000年4月21日公开了“optical fiber bend sensor(光纤弯曲传感器)”的美国专利号6,389,187,这些专利都通过引用以其全部内容并入本文。在一些实施例中,跟踪系统1830可以可选地和/或额外地使用位置传感器系统1820跟踪远端1818。位置传感器系统1820可以是em传感器系统的部件,其中位置传感器系统1820包括一个或多个导电线圈,这些线圈可能受到外部生成的电磁场的影响。在一些实施例中,位置传感器系统1820可以被配置和定位为测量六个自由度(例如,三个位置坐标x、y和z以及指示基点的俯仰、偏航和滚动的三个方位角),或五个自由度(例如,三个位置坐标x、y和z以及指示基点的俯仰和偏航的两个方位角)。提交于1999年8月9日的美国专利号6,380,732提供了位置传感器系统的进一步描述,该专利公开了“six-degree of freedom tracking system having a passive transponder on the object being tracked(在被跟踪物体上具有无源转发器的六自由度跟踪系统
)”,该专利以其全部内容通过引用并入本文。在一些实施例中,光纤传感器可用于测量温度或力。在一些实施例中,温度传感器、力传感器、阻抗传感器或其他类型的传感器可以包括在柔性体内。在各种实施例中,一个或多个位置传感器(例如,纤维形状传感器、em传感器和/或类似物)可以集成在医疗器械1826内,并用于使用跟踪系统1830跟踪医疗器械1826的远端或部分的位置、取向、速度、速率、姿势和/或形状。
161.柔性体1816包括通道1821,其大小和形状被设计成接收医疗器械1826。例如,图18b是根据一些实施例的其中医疗器械1826延伸的柔性体1816的简化图。在一些实施例中,医疗器械1826可用于程序诸如成像、可视化、手术、活检、消融、照明、灌注和/或抽吸。医疗器械1826可以通过柔性体1816的通道1821部署,并在解剖结构内的目标位置处使用。医疗器械1826可以包括例如图像捕获探针、活检器械、激光消融纤维和/或其他手术、诊断或治疗工具,包括上述的柔性器械(例如,柔性器械100或200)或能量输送系统(例如,能量输送系统300、400或500)中的任一个。医疗器械1826可与柔性体1816内的成像器械(例如,图像捕获探针)一起使用。成像器械可包括与相机耦连的电缆以用于传输捕获的图像数据。在一些实施例中,成像器械可以是光纤束,诸如光纤镜,其与图像处理系统1831耦连。成像器械可以是单或多光谱的,例如在可见、红外和/或紫外光谱中的一个或多个中捕获图像数据。医疗器械1826可以从通道1821的开口推进以执行程序,并然后在程序完成后缩回到通道1821中。医疗器械1826可以从柔性体1816的近端1817或从沿柔性体1816的另一个可选器械口(未示出)去除。
162.柔性体1816还可以容纳在驱动单元1804和远端1818之间延伸的电缆、联动件或其他转向控件(未示出),以可控制地弯曲远端1818,例如通过远端1818的断裂虚线描绘1819所示。在一些实施例中,至少有四根电缆被用来提供独立的“上下”转向以控制远端1818的俯仰,以及“左右”转向以控制远端1818的偏航。提交于2011年10月14日的美国专利号9,452,276中详细描述了可转向的细长柔性装置,该专利公开了“带有可去除的视觉探针的导管”,并且该专利以其全部内容通过引用并入本文。在各种实施例中,医疗器械1826(例如柔性器械100或200,或能量输送系统300、400或500)可以耦连到驱动单元1804或单独的第二驱动单元(未示出),并使用转向控件可控制地或机器人地可弯曲。
163.来自跟踪系统1830的信息可以被发送到导航系统1832,在那里它与来自图像处理
系统1831的信息和/或术前获得的模型组合,以向操作者提供实时位置信息。在一些实施例中,实时位置信息可以显示在图17的显示系统1710上,以用于控制医疗器械系统1800。在一些实施例中,图17的控制系统1712可以利用位置信息作为用于定位医疗器械系统1800的反馈。提交于2011年5月13日的美国专利号8,900,131中提供了用于使用光纤传感器来配准和显示手术器械与手术图像的各种系统,该专利公开了“为图像引导的手术提供解剖结构模型的动态配准的医疗系统”,该专利以其全部内容通过引用并入本文。
164.在一些实施例中,医疗器械系统1800可以在图17的医疗系统1700内进行远程操作。在一些实施例中,图17的操纵器组件1702可被直接操作者控制所取代。在一些实施例中,直接操作者控制可以包括各种手柄和操作者界面以用于器械的手持操作。
165.示例
166.本技术的几个方面在以下示例中阐述:
167.1.一种柔性器械,包括:
168.细长装置,其包括内导体、包围所述内导体的外导体,和将所述内导体与所述外导体绝缘的电介质层;
169.在所述外导体中形成的凹槽;以及
170.在所述凹槽内并绕所述内导体定位的插入件。
171.2.根据示例1所述的柔性器械,其中所述细长装置包括近侧区段和远侧区段,并且其中所述凹槽定位在所述细长装置的所述远侧区段处以形成天线体。
172.3.根据示例2所述的柔性器械,进一步包括在所述天线体的至少一部分上延伸并定位在所述插入件上的屏障层。
173.4.根据示例3所述的柔性器械,其中所述屏障层包括多个非导电层。
174.5.根据示例3或示例4所述的柔性器械,其中所述屏障层被配置为将所述插入件固定在所述凹槽内。
175.6.根据示例3或示例4所述的柔性器械,其中所述多个非导电层中的一个被配置为将所述天线体与流体密封。
176.7.根据示例3或示例4所述的柔性器械,其中所述屏障层由含氟聚合物、塑料材料、热缩材料或保形涂层组成。
177.8.根据示例1至7中任一项所述的柔性器械,进一步包括定位在所述外导体的至少一部分上的封套层。
178.9.根据示例8所述的柔性器械,其中所述凹槽进一步形成在所述封套层中。
179.10.根据示例8或示例9所述的柔性器械,其中所述封套层是非导电的。
180.11.根据示例8至10中任一项所述的柔性器械,其中所述封套层由塑料材料、pet涂层或热缩材料组成。
181.12.根据示例1至11中任一项所述的柔性器械,进一步包括导电材料,所述导电材料在所述柔性器械的远侧尖端附近将所述内导体电耦合到所述外导体。
182.13.根据示例1至11中任一项所述的柔性器械,进一步包括接近所述柔性器械的远侧尖端并电耦合到所述内导体的导电材料。
183.14.根据示例13所述的柔性器械,进一步包括在所述导电材料、所述插入件和所述细长装置的至少一部分上延伸的屏障层。
184.15.根据示例13所述的柔性器械,进一步包括:
185.非导电塞子,其形成在所述导电材料的远端处;以及
186.屏障层,其定位在所述导电材料、所述非导电塞子、所述插入件上延伸,并且定位在所述细长器件的至少一部分上延伸。
187.16.根据示例1至15中任一项所述的柔性器械,其中所述插入件是狭缝管。
188.17.根据示例1至16中任一项所述的柔性器械,其中所述插入件使用粘合剂固定在所述凹槽内。
189.18.根据示例1至17中任一项所述的柔性器械,其中所述插入件是非导电的。
190.19.根据示例1至18中任一项所述的柔性器械,其中所述插入件完全填充所述凹槽。
191.20.根据示例1至19中任一项所述的柔性器械,其中所述凹槽具有矩形、正方形、梯形、三角形、圆形或椭圆形横截面形状。
192.21.根据示例1至19中任一项所述的柔性器械,其中所述凹槽沿所述外导体的长度具有线性、弯曲形、曲线、环形、螺旋形、蛇形、之字形。
193.22.根据示例1至21中任一项所述的柔性器械,其中所述凹槽进一步形成在所述电介质层中。
194.23.根据示例1至22中任一项所述的柔性器械,其中所述外导体包括多丝层。
195.23.根据示例1至23中任一项所述的柔性器械,其中所述外导体包括编织层、箔层或镍钛合金层中的至少一种。
196.24.根据示例1至23中任一项所述的柔性器械,其中所述凹槽形成凹槽图案的一部分,并且其中所述凹槽图案包括第一凹槽和第二凹槽,每个凹槽沿所述外导体的远侧区段形成。
197.25.根据示例24所述的柔性器械,其中所述凹槽图案由所述第一凹槽和所述第二凹槽的间距、所述第一凹槽和所述第二凹槽的位置、所述第一凹槽和所述第二凹槽的形状或所述第一凹槽和所述第二凹槽的大小限定。
198.27.根据示例24所述的柔性器械,其中:
199.所述插入件是定位在所述第一凹槽内的第一插入件;以及
200.所述柔性器械进一步包括在所述第二凹槽内并绕所述内导体定位的第二插入件。
201.28.根据示例1至27中任一项所述的柔性器械,其中所述细长装置包括近侧区段和远侧区段,并且其中所述细长装置的所述近侧区段与所述细长装置的所述远侧区段是不同的且固定耦连的电缆区段。
202.29.一种能量输送系统,包括:
203.示例2的柔性器械,
204.其中所述柔性器械进一步包括——
205.传输构件,其中所述天线体处于所述传输构件的远端部分;
206.包围所述天线体和所述传输构件的护套;以及
207.至少部分地设置在所述护套内的至少一个流体导管,
208.其中——
209.所述至少一个流体导管限定流体入口通道,其被配置为向所述天线体的远端近侧
运送流体,以及
210.所述至少一个流体导管被配置为沿所述柔性器械的至少一个区段提供可变的可恢复柔性。
211.30.根据示例29所述的系统,其中所述至少一个流体导管由防止干扰所述天线体的能量输送的材料组成。
212.31.根据示例29或示例30所述的系统,其中所述至少一个流体导管包括由弹性柔性材料形成的第一区域和由非导电材料形成的第二区域。
213.32.根据示例31所述的系统,其中所述弹性柔性材料是形状记忆材料,并且所述非导电材料是塑料或聚合物。
214.33.根据示例31或示例32所述的系统,其中所述第一区域与所述护套内的所述传输构件的至少一部分并排延伸,并在所述传输构件的所述远端部分处或近侧终止。
215.34.根据示例31至33中任一项所述的系统,其中所述至少一个流体导管进一步包括过渡区域,其中所述过渡区域经由重叠或渐缩将所述第一区域耦连到所述第二区域。
216.35.根据示例29至34中任一项所述的系统,进一步包括被配置用于可滑动地插入所述至少一个流体导管内的管芯针。
217.36.根据示例29至35中任一项所述的系统,其中所述至少一个流体导管由非导电材料组成,并且所述管芯针由弹性柔性材料形成。
218.37.根据示例29至36中任一项所述的系统,进一步包括处于所述柔性器械的近端处的可滑动机构,其中所述可滑动机构机械地耦连到所述至少一个流体导管的近端部分。
219.38.根据示例37所述的系统,其中所述可滑动机构包括线性滑块、电缆驱动组件、机械臂或马达驱动的导螺杆中的至少一个。
220.39.根据示例29至38中任一项所述的系统,其中所述至少一个流体导管包括图案化到所述流体导管中的一个或多个狭槽或切口,并且其中所述一个或多个狭槽或切口中的至少一个狭槽或切口的形状和大小被设计成使得流体离开所述至少一个流体导管进入绕所述天线体的所述柔性器械的通道中。
221.40.根据示例29至38中任一项所述的系统,其中所述至少一个流体导管包括图案化到所述流体导管中的一个或多个狭槽或切口,并且其中所述一个或多个狭槽或切口用热缩材料层压,使得防止所述流体经由所述狭槽或切口离开所述流体导管。
222.41.根据示例29至40中任一项所述的系统,其中所述至少一个流体导管包括至少部分地设置在所述护套内的第一流体导管和第二流体导管,并且其中所述第一流体导管的远端沿所述护套的长度定位在与所述第二流体导管的远端不同的位置。
223.42.一种操作能量输送系统的方法,所述能量输送系统包括具有传输构件的柔性器械、处于所述传输构件的远端部分处的天线、包围所述柔性器械的护套与至少部分地设置在所述护套内的流体导管,所述方法包括:
224.在所述柔性器械导航至患者体内的目标期间,使用所述流体导管向所述柔性器械的至少一个区段提供弹性柔性;
225.经由所述天线向所述目标输送能量;以及
226.至少在向所述目标输送能量的同时,接近所述天线输送流体,
227.其中所述流体经由所述流体导管输送,同时所述流体导管的远端延伸到所述天线
的远端部分。
228.43.根据示例42所述的方法,其中提供弹性柔性包括在所述导航期间使用延伸到所述天线的至少所述远端部分的形状记忆材料。
229.44.根据示例43所述的方法,进一步包括在经由所述天线向所述目标组织输送能量之前,将所述形状记忆材料的所述远端缩回到所述传输构件的至少所述远端。
230.45.根据示例43或示例44所述的方法,其中所述形状记忆材料形成可滑动地定位在所述流体导管内的管芯针,并且其中所述流体导管由非导电材料形成。
231.46.根据示例43至45中任一项所述的方法,其中所述形状记忆材料形成所述流体导管,并且其中所述流体导管被配置为可在所述封套内滑动。
232.47.一种能量输送系统,所述系统包括:
233.柔性器械,其包括具有内导体、包围所述内导体的外导体和将所述内导体与所述外导体绝缘的电介质层的细长装置,所述柔性器械进一步包括:
234.在所述外导体中形成的凹槽;以及
235.在所述凹槽内并绕所述内导体定位的插入件;
236.包围所述柔性器械的护套;以及
237.至少一个流体导管,其至少部分地设置在所述护套内并沿所述柔性器械延伸,
238.其中所述至少一个流体导管限定流体入口通道,所述流体入口通道被配置为将流体运送到所述柔性器械的远端区域,并且进一步其中所述至少一个流体导管沿所述柔性器械的至少一部分提供可变的可恢复柔性。
239.48.根据示例47所述的能量输送系统,其中所述细长装置包括近侧区段和远侧区段,并且其中所述凹槽定位在所述细长装置的所述远侧区段处以形成天线体。
240.49.根据示例47或示例48所述的能量输送系统,其中所述插入件完全填充所述凹槽。
241.50.根据示例47至49中任一项所述的能量输送系统,其中所述凹槽具有矩形、正方形、梯形、三角形、圆形或椭圆形横截面形状。
242.51.根据示例47至49中任一项所述的能量输送系统,其中所述凹槽具有沿所述外导体的长度的线性、弯曲形、曲线、环形、螺旋形、蛇形或之字形。
243.52.根据示例47至51中任一项所述的能量输送系统,其中所述插入件是狭缝管。
244.53.根据示例47至52中任一项所述的能量输送系统,其中所述插入件使用粘合剂固定在所述凹槽内。
245.54.根据示例47至53中任一项所述的能量输送系统,其中所述插入件由胶水、ptfe、fep、peek或聚氨酯组成。
246.55.根据示例47至54中任一项所述的能量输送系统,进一步包括被配置用于可滑动地插入所述至少一个流体导管内的管芯针。
247.56.根据示例47至55中任一项所述的能量输送系统,其中所述至少一个流体导管包括至少部分地设置在所述护套内的第一流体导管和第二流体导管,并且其中所述第一流体导管与所述第二流体导管并排行进并与所述第二流体导管分离。
248.结论
249.本文中描述的系统和方法可以以一种或多种有形和非暂时性机器可读介质(诸如
硬盘驱动器、硬件存储器、光学介质、半导体介质、磁介质等)的形式提供,该介质上记录有指令用于由处理器或计算机执行。指令集可包括指示计算机或处理器执行具体操作的各种命令,诸如此处描述的各种实施例的方法和过程。指令集可以是软件程序或应用程序的形式。编程指令可以实施为多个单独的程序或子例程,或它们可以集成到本文中描述的系统的多个其他方面。计算机存储介质可以包括易失性和非易失性介质,以及可移除和不可移除的介质,以用于存储信息,诸如计算机可读指令、数据结构、程序模块或其他数据。计算机存储介质可以包括但不限于ram、rom、eprom、eeprom、闪存或其他固态存储器技术、cd-rom、dvd或其他光学存储、磁盘存储,或可用于存储所期望信息并可被系统部件访问的任何其他硬件介质。系统的部件可以经由有线或无线通信彼此通信。在一个实施例中,控制系统支持无线通信协议,诸如蓝牙、irda(红外数据通讯)、homerf(家庭射频)、ieee 802.11、dect(数位加强式无线通讯系统)和无线遥测。部件可以彼此分离,或者部件的各种组合可以一起集成到监视器或处理器中,或者包含在具有标准计算机硬件(例如,处理器、电路系统、逻辑电路、存储器等)的工作站中。该系统可以包括处理装置,诸如微处理器、微控制器、集成电路、控制单元、存储介质和其他硬件。
250.可通过本文中公开的细长柔性装置或导管输送的医疗工具可包括,例如,图像捕获探针、活检器械、激光消融纤维和/或其他手术、诊断或治疗工具。医疗工具可包括整体形成和/或单独附接的末端执行器,其具有单个工作构件,诸如手术刀、钝刀、光纤、电极和/或类似物。其他末端执行器可包括,例如,镊子、抓取器、剪刀、夹子和/或类似物。其他末端执行器可进一步包括电激活的末端执行器,诸如电外科电极、换能器、传感器和/或类似物。医疗工具可包括图像捕获探针,其包括用于捕获图像(包括视频图像)的立体或单面相机。医疗工具可以另外容纳电缆、联动件或其他致动控件(未示出),这些装置在其近端和远端之间延伸,以可控制地弯曲工具的远端。可转向器械在以下专利中详细描述:提交于2005年10月4日的美国专利号7,316,681,其公开了“articulated surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity(用于执行具有增强的灵巧和敏感性的微创手术的铰接手术器械
)”,以及提交于2008年9月30日的美国专利号9,259,274,其公开了“passive preload and capstan drive for surgical instruments(用于手术器械的被动预载和绞盘驱动)”,这些专利以其全部内容通过引用并入本文。
251.本文中描述的系统可适用于经由自然或手术创建的连接通路对各种解剖系统中的任一个进行解剖组织的导航和治疗,该解剖系统包括肺、结肠、胃、肠、肾和肾盏、膀胱、肝、胆囊、胰腺、脾、输尿管、卵巢、子宫、大脑、循环系统(包括心脏、脉管)和/或类似物。
252.注意,所介绍的过程和显示可能与任何特别的计算机或其他设备没有内在联系。各种通用系统可以与根据本文中的教导的程序一起使用,或者可以证明构建更专门的设备来执行所描述的操作是方便的。各种这些系统所需的结构将作为要素出现在权利要求中。此外,本发明的实施例没有参考任何特别的编程语言来描述。应理解的是,各种编程语言都可以用来实施本文中描述的本发明的教导。
253.虽然在附图中已描述和显示了本发明的某些示例性实施例,但应当理解,此类实施例仅仅是说明性的,并且不是对广泛的发明的限制,而且本发明的实施例不限于所示出和描述的具体构造和布置,因为对于本领域普通技术人员来说,可能发生各种其他修改。对
本技术的实施例的上述详细描述不意图详尽无遗,或将本技术限制在上面公开的精确形式。尽管上面描述了本技术的具体实施例和示例是为了说明问题,但在本技术的范围内可以进行各种等效的修改,相关领域的技术人员会认识到这一点。例如,虽然步骤是以给定的顺序提出的,但可替代实施例可以以不同的顺序执行步骤。此外,本文中描述的各种实施例也可以组合以提供进一步的实施例。
254.从上文应理解,为了说明的目的,本文中已描述了本技术的具体实施例,但为了避免不必要地掩盖本技术的实施例的描述,没有详细示出或描述众所周知的结构和功能。如果通过引用并入本文的任何材料与本公开相冲突,则以本公开为准。在上下文允许的情况下,单数或复数术语也可以分别包括复数或单数术语。此外,除非“或”字被明确限制为仅指在提及由两个或更多个项目组成的列表时排除其他项目的单个项目,否则在此列表中使用“或”应被解释为包括(a)列表中的任何单个项目,(b)列表中的所有项目,或(c)列表中项目的任何组合。如本文所用,“a和/或b”中的短语“和/或”是指a单独,b单独,以及a和b两者。在上下文允许的情况下,单数或复数术语也可以分别包括复数或单数术语。此外,术语“包括(comprising)”、“包括(including)”、“具有(having)”和“具有”自始至终都用于指至少包括(多个)所提及的特征,使得不排除任何更多数量的相同特征和/或额外类型的特征。
255.此外,如本文所用,术语“基本上”是指动作、特性、属性、状态、结构、项目或结果的完整或几乎完整的范围或程度。例如,“基本上”封闭的物体将意味着该物体是完全封闭的或几乎完全封闭的。在一些情况下,偏离绝对完整性的确切可允许程度可能取决于具体的环境。然而,一般来说,接近完成的程度将与获得绝对和完全完成的情况下的总体结果相同。使用“基本上”同样适用于在负面内涵中用于指完全或接近完全没有动作、特性、属性、状态、结构、项目或结果的时候。
256.从上述内容中还将认识到,可以在不偏离本技术的情况下进行各种修改。例如,本技术的各种部件可以进一步划分为子部件,或者本技术的各种部件和功能可以被组合和/或整合。此外,尽管与本技术的某些实施例相关联的优点已在那些实施例的背景下进行了描述,但其他实施例也可以表现出此类优点,而且并非所有的实施例都需要表现出此类优点才能落入本技术的范围内。因此,本公开和相关联技术可以包括本文中未明确示出或描述的其他实施例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。