1.本发明涉及水质监测技术领域,尤其是一种内陆河流水体的水环境监测方法。
背景技术:
2.随着我国这几年经济的迅速发展,水资源的污染愈发严重,湖泊生态系统遭到破坏并且严重失衡,水质也在恶化,河流和湖泊频频有蓝藻水华、水体富营养化等现象发生,更加使原本匮乏的水资源雪上加霜,水又是生命之源,是“万物之本”,是人类社会赖以生存和发展的重要资源。因此,处在21世纪的人们比以往任何时候都更加重视水质的重要性,因此环境保护迫不及待,而环境监测是环境保护工作的基础,是环境规划、立法和决策的重要依据。内陆河流水体污染的监测与治理也显得尤为重要。实时、动态、大范围地对内陆河流水质进行监测与预警,能够为河流污染治理和水生态环境的保障提供准确有效的技术支持。
3.目前,中国水源地污染监测以传统“点”尺度为主要监测手段,无法精准获取“面”尺度信息,水质监测主要依靠人工监测,人工监测通过实地采样,采样后送至检测。这种方法可以准确地检测出采样点的各水质参数信息,并且具有监测精度高、研究针对性强等优点。然而,这些方法周期很长且需要消耗大量人力物力时效性不足且不能反映区域整体水质状况,难以满足内陆河流监测体系的需求。
技术实现要素:
4.为有效解决传统人工水质检测成本高、时效性不足且无法反映区域整体水质状况的不足、无法实现动态、高效监测的缺点,本发明的目的在于提供一种利用机器学习弥补无人机技术的局限性,更好地拟合遥感数据和水质指标的关系,使模型预测更为准确,实现内陆河流水体实时监测预警的内陆河流水体的水环境监测方法。
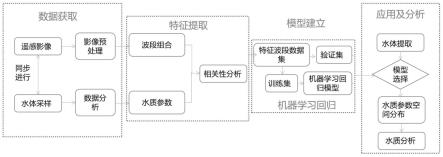
5.为实现上述目的,本发明采用了以下技术方案:一种内陆河流水体的水环境监测方法,该方法包括下列顺序的步骤:
6.(1)确定目标区域及对应水质各目标要素,确定目标区域水质采样点坐标;
7.(2)利用无人机搭载多光谱相机获取目标区域水质采样点对应的图像,得到无人机影像,经处理得到光谱数据;
8.(3)将光谱数据进行组合得到光谱特征参数,将光谱特征参数与水质各目标要素进行相关性分析,选取相关性最高的光谱特征参数组成数据集,将数据集划分为训练集和验证集两个部分;
9.(4)将数据集输入到机器学习,进行模型训练,验证得到最优解,经性能评估确定水质反演模型;
10.(5)基于水质反演模型对无人机影像进行反演,得到监测指标值,对超标指标进行预警。
11.所述步骤(1)具体包括以下步骤:
12.(1a)首先选定目标区域,对目标区域进行布点设置,按照水域的面积与形状确定采样点坐标,确定采样点坐标的经纬度;
13.(1b)对所采水样进行检测,得到水质各目标要素实际数据,所述水质各目标要素包括总氮、总磷和氨氮含量浓度。
14.所述步骤(2)具体包括以下步骤:
15.(2b)进行辐射校正:采用线性变换方法对无人机影像的反射率进行校正,利用标定靶反射率的经验值与无人机影像上的dn值建立线性函数模型,进而对整个图像线性变换;
16.(2c)进行反射数据提取:将经过辐射校正的无人机影像导入envi软件,构建以目标区域水质采样点为中心的roi感兴趣区域,以该roi感兴趣区域所有点的平均光谱反射率作为该目标区域水质采样点的光谱数据。
17.所述步骤(3)具体包括以下步骤:
18.(3a)将光谱数据进行组合,得到光谱特征参数,进行皮尔逊相关性分析,得出光谱特征参数与水质各目标要素的相关性,相关性计算公式如下:
[0019][0020]
式中:r
xy
为光谱特征参数与水质各目标要素的相关系数,r
xy
的绝对值越接近1,相关性越高,xi与yi分别为光谱特征参数与水质各目标要素的样本值;为xi的平均值,为yi的平均值;
[0021]
(3b)将相关性最高的光谱特征参数组成数据集划分为两个部分,即70%用于模型训练的训练集,以及30%用于模型验证的验证集。
[0022]
所述步骤(4)具体包括以下步骤:
[0023]
(4a)将训练集作为模型输入;
[0024]
(4b)将水质各目标要素实际数据作为模型输出;
[0025]
(4c)建立水质反演模型,水质反演模型由多个机器学习网络和一个融合模块构成,所述多个机器学习网络包括深度神经网络、bp神经网络和遗传随机森林,深度神经网络、bp神经网络和遗传随机森林三者并行处理;
[0026]
多个机器学习网络的激活函数采用relu函数,其公式为:
[0027][0028]
融合模块的公式如下:
[0029]
p=αpc βpb (1-α-β)pg[0030]
式中,p代表水域水质的各目标要素浓度,pc,pb,pg分别代表深度神经网络、bp神经网络和遗传随机森林得到的水域水质的浓度值,α,β是权重参数,通过训练学习得到;
[0031]
(4d)将验证集输入水质反演模型中,水质反演模型输出得到预测结果,对水质反演模进行评价,用决定系数r2、均方根误差rmse、平均绝对百分比误差mae进行模型精度评价,计算公式分别如下:
[0032][0033][0034][0035]
其中,n为样本总数,i为第i组数据,为第i组数据的模型估计浓度,pi为第i组数据的实测浓度,为第i组数据的实测浓度平均值,r2越逼近1,rmse、mae越逼近0,则模型的反演效果越好。
[0036]
所述步骤(5)具体是指:基于水质反演模型对无人机影像进行反演,得到监测指标值,并根据《地表水环境质量标准gb3838-2002》对超标指标进行预警。
[0037]
由上述技术方案可知,本发明的有益效果为:第一,本发明将无人机遥感与水质监测相结合,整个水质要素的反演过程中涉及到的设备包括无人机和光谱相机,并通过一些物理及化学手段检测获取水质要素数据,检测过程更为简便,操作简单;第二,本发明基于无人机遥感监测水质,相比于传统手工采样监测、自动监测站监测规范更广,相对与卫星遥感监测,无人机监测具有较高的分辨率,更加适用于小微河道,更好发现一些常规方法难以揭示的污染源和污染物迁移特征,十分适宜内陆水系的污染治理需求;第三,本发明利用不同波段进行组合,得到的特征参数通过机器学习训练与拟合进行得到的模型更具有实用性和适用性;第四,本发明根据模型反演监测指标和相关标准规范,可实现对水污染程度的识别,为后期污染治理提供数据支撑。
附图说明
[0038]
图1为本发明的方法流程图。
具体实施方式
[0039]
如图1所示,一种内陆河流水体的水环境监测方法,该方法包括下列顺序的步骤:
[0040]
(1)确定目标区域及对应水质各目标要素,确定目标区域水质采样点坐标;
[0041]
(2)利用无人机搭载多光谱相机获取目标区域水质采样点对应的图像,得到无人机影像,经处理得到光谱数据;
[0042]
(3)将光谱数据进行组合得到光谱特征参数,将光谱特征参数与水质各目标要素进行相关性分析,选取相关性最高的光谱特征参数组成数据集,将数据集划分为训练集和验证集两个部分;
[0043]
(4)将数据集输入到机器学习,进行模型训练,验证得到最优解,经性能评估确定水质反演模型;
[0044]
(5)基于水质反演模型对无人机影像进行反演,得到监测指标值,对超标指标进行
预警。
[0045]
所述步骤(1)具体包括以下步骤:
[0046]
(1a)首先选定目标区域,对目标区域进行布点设置,按照水域的面积与形状确定采样点坐标,确定采样点坐标的经纬度;
[0047]
(1b)对所采水样进行检测,得到水质各目标要素实际数据,所述水质各目标要素包括总氮、总磷和氨氮含量浓度。
[0048]
所述步骤(2)具体包括以下步骤:
[0049]
(2b)进行辐射校正:采用线性变换方法对无人机影像的反射率进行校正,利用标定靶反射率的经验值与无人机影像上的dn值建立线性函数模型,进而对整个图像线性变换;通过辐亮度校正将原始的dn值转换为辐亮度值减少太阳角度、双向反射分布函数效应、云的阴影、相机增益及曝光时间等对传感器的测量值的影响。
[0050]
(2c)进行反射数据提取:将经过辐射校正的无人机影像导入envi软件,构建以目标区域水质采样点为中心的roi感兴趣区域,以该roi感兴趣区域所有点的平均光谱反射率作为该目标区域水质采样点的光谱数据。
[0051]
所述步骤(3)具体包括以下步骤:
[0052]
(3a)将光谱数据进行组合,得到光谱特征参数,进行皮尔逊相关性分析,得出光谱特征参数与水质各目标要素的相关性,相关性计算公式如下:
[0053][0054]
式中:r
xy
为光谱特征参数与水质各目标要素的相关系数,r
xy
的绝对值越接近1,相关性越高,xi与yi分别为光谱特征参数与水质各目标要素的样本值;为xi的平均值,为yi的平均值;
[0055]
(3b)将相关性最高的光谱特征参数组成数据集划分为两个部分,即70%用于模型训练的训练集,以及30%用于模型验证的验证集。
[0056]
所述步骤(4)具体包括以下步骤:
[0057]
(4a)将训练集作为模型输入;
[0058]
(4b)将水质各目标要素实际数据作为模型输出;
[0059]
(4c)建立水质反演模型,水质反演模型由多个机器学习网络和一个融合模块构成,所述多个机器学习网络包括深度神经网络、bp神经网络和遗传随机森林,深度神经网络、bp神经网络和遗传随机森林三者并行处理;
[0060]
多个机器学习网络的激活函数采用relu函数,其公式为:
[0061][0062]
融合模块的公式如下:
[0063]
p=αpc βpb (1-α-β)pg[0064]
式中,p代表水域水质的各目标要素浓度,pc,pb,pg分别代表深度神经网络、bp神经网络和遗传随机森林得到的水域水质的浓度值,α,β是权重参数,通过训练学习得到;
[0065]
(4d)将验证集输入水质反演模型中,水质反演模型输出得到预测结果,对水质反
演模进行评价,用决定系数r2、均方根误差rmse、平均绝对百分比误差mae进行模型精度评价,计算公式分别如下:
[0066][0067][0068][0069]
其中,n为样本总数,i为第i组数据,为第i组数据的模型估计浓度,pi为第i组数据的实测浓度,为第i组数据的实测浓度平均值,r2越逼近1,rmse、mae越逼近0,则模型的反演效果越好。
[0070]
所述步骤(5)具体是指:基于水质反演模型对无人机影像进行反演,得到监测指标值,并根据《地表水环境质量标准gb3838-2002》对超标指标进行预警。
[0071]
综上所述,本发明将无人机遥感与水质监测相结合,整个水质要素的反演过程中涉及到的设备包括无人机和光谱相机,并通过一些物理及化学手段检测获取水质要素数据,检测过程更为简便,操作简单;本发明基于无人机遥感监测水质,相比于传统手工采样监测、自动监测站监测规范更广,相对与卫星遥感监测,无人机监测具有较高的分辨率,更加适用于小微河道,更好发现一些常规方法难以揭示的污染源和污染物迁移特征,十分适宜内陆水系的污染治理需求;本发明利用不同波段进行组合,得到的特征参数通过机器学习训练与拟合进行得到的模型更具有实用性和适用性;本发明根据模型反演监测指标和相关标准规范,可实现对水污染程度的识别,为后期污染治理提供数据支撑。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。