技术特征:
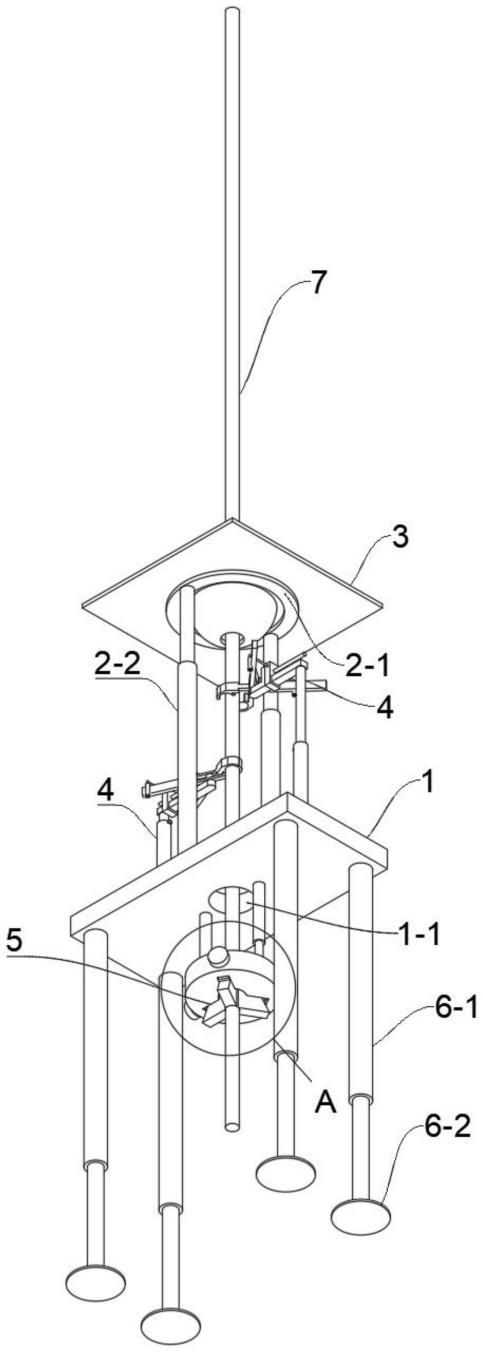
1.一种超级预应力支护装置,其特征在于,所述装置包括底板(1)、托盘夹具(2-1)、送锚机构(4)和张拉机构(5);所述底板(1)上开有贯通底板(1)上下表面的通孔(1-1),通孔(1-1)直径大于锚索(7)直径,底板(1)上部固定连接第一升降杆(2-2),第一升降杆(2-2)伸缩方向与通孔(1-1)中轴线平行,所述第一升降杆(2-2)上端固定连接托盘夹具(2-1);所述托盘夹具(2-1)与托盘(3)下表面形状相匹配,托盘夹具(2-1)中轴线与通孔(1-1)中轴线重合;所述底板(1)上部还设有送锚机构(4),送锚机构(4)与锚索(7)相匹配,送锚机构(4)中轴线与通孔(1-1)重合;所述底板(1)下部固定连接张拉机构(5),张拉机构(5)与锚索(7)相匹配,张拉机构(5)中轴线与通孔(1-1)重合。2.根据权利要求1所述的超级预应力支护装置,其特征在于,所述托盘夹具(2-1)为环状,托盘夹具(2-1)的内径与托盘(3)下表面突出部相匹配。3.根据权利要求2所述的超级预应力支护装置,其特征在于,所述托盘夹具(2-1)上表面设有橡胶垫;所述底板(1)下表面设有第四升降杆(6-1),第四升降杆(6-1)包括4个,4个第四升降杆(6-1)分布在底板(1)的四角处,第四升降杆(6-1)的下端固定连接支撑盘(6-2),支撑盘(6-2)下表面与第四升降杆(6-1)长度方向垂直。4.根据权利要求1所述的超级预应力支护装置,其特征在于,所述送锚机构(4)包括控制器(10)、位置反馈传感器(8)、第二升降杆(4-1)和锚索抓手(4-2);所述第二升降杆(4-1)包括两个,两个第二升降杆(4-1)设置在通孔(1-1)两侧,两个第二升降杆(4-1)上端分别连接有锚索抓手(4-2),第二升降杆(4-1)的伸缩方向与通孔(1-1)中轴线平行,第二升降杆(4-1)与控制器(10)电连接;所述位置反馈传感器(8)设置在第二升降杆(4-1)上,位置反馈传感器(8)与控制器(10)电连接。5.根据权利要求4所述的超级预应力支护装置,其特征在于,所述锚索抓手(4-2)包括轻触开关(4-2-9)、支撑臂(4-2-13)、弹片(4-2-10)、第一活动杆(4-2-3)、第二活动杆(4-2-4)、第一夹块(4-2-5)、第二夹块(4-2-6)、步进电机(4-2-11)、丝杆(4-2-12)、滑块(4-2-2)和控制臂(4-2-8);所述支撑臂(4-2-13)一端与第二升降杆(4-1)上端固定连接,支撑臂(4-2-13)与第二升降杆(4-1)垂直,支撑臂(4-2-13)上远离第二升降杆(4-1)的上表面设有夹持转轴(4-7),转轴与第二升降杆(4-1)平行;第一活动杆(4-2-3)与第二活动杆(4-2-4)转动连接在夹持转轴(4-7)上;所述第一夹块(4-2-5)固定连接在第一活动杆(4-2-3)远离第二升降杆(4-1)的一端,第二夹块(4-2-6)固定连接在第二活动杆(4-2-4)远离第二升降杆(4-1)的一端,第一夹块(4-2-5)上开有半圆弧,半圆弧开口处朝向第二夹块(4-2-6),半圆弧中轴线与通孔(1-1)中轴线平行,第二夹块(4-2-6)与第一夹块(4-2-5)左右对称,当第一夹块(4-2-5)与第二夹块(4-2-6)相互接触时,第一夹块(4-2-5)与第二夹块(4-2-6)上的半圆弧合围形成圆柱孔,且圆柱孔的中轴线与通孔(1-1)中轴线重合;
所述弹片(4-2-10)设置在第一活动杆(4-2-3)和第二活动杆(4-2-4)之间,弹片(4-2-10)的弹力方向与第一活动杆(4-2-3)和第二活动杆(4-2-4)张开的方向一致;所述步进电机(4-2-11)固定连接在支撑臂(4-2-13)上,步进电机(4-2-11)转轴与支撑臂(4-2-13)长度方向平行,步进电机(4-2-11)的转轴上固定连丝杆(4-2-12),丝杆(4-2-12)的中轴线与步进电机(4-2-11)转轴中轴线重合,步进电机(4-2-11)与控制器(10)电连接;所述滑块(4-2-2)滑动连接在支撑臂(4-2-13)上,滑块(4-2-2)上开有第一螺孔(4-2-1),第一螺孔(4-2-1)在支撑臂(4-2-13)长度方向贯通滑块(4-2-2),第一螺孔(4-2-1)与丝杆(4-2-12)相匹配,丝杆(4-2-12)与第一螺孔(4-2-1)螺纹连接;所述控制臂(4-2-8)包括2个,两个控制臂(4-2-8)以支撑臂(4-2-13)为中轴线为中心线对称分布,控制臂(4-2-8)包括第一支杆(4-2-8-1)和第二支杆(4-2-8-2),第一支杆(4-2-8-1)与第二支杆(4-2-8-2)连接组成l形,第一支杆(4-2-8-1)固定连接在滑块(4-2-2)上,第二支杆(4-2-8-2)与第一活动杆(4-2-3)或第二活动杆(4-2-4)的外侧面接触,控制臂(4-2-8)的第二支杆(4-2-8-2)位于夹持转轴(4-7)靠第二升降杆(4-1)的一侧;所述轻触开关(4-2-9)固定连接在支撑臂(4-2-13)上,设控制臂(4-2-8)驱动第一夹块(4-2-5)与第二夹块(4-2-6)接触时滑块(4-2-2)位于支撑臂(4-2-13)上的a点,轻触开关(4-2-9)位置位于支撑臂(4-2-13)上的a点,轻触开关(4-2-9)为常关式,轻触开关(4-2-9)与控制器(10)电连接。6.根据权利要求5所述的超级预应力支护装置,其特征在于,所述第二支杆(4-2-8-2)与第一活动杆(4-2-3)和第二活动杆(4-2-4)垂直。7.根据权利要求6所述的超级预应力支护装置,其特征在于,所述第二支杆(4-2-8-2)上设有中轴线与第二支杆(4-2-8-2)中轴线重合的滚轮。8.根据权利要求1所述的超级预应力支护装置,其特征在于,所述张拉机构(5)包括第三升降杆(5-2)和紧固盘(5);所述第三升降杆(5-2)包括两个,第三升降杆(5-2)一端固定连接在底板(1)下表面,两个第三升降杆(5-2)位于通孔(1-1)两侧,第三升降杆(5-2)与通孔(1-1)中轴线平行,第三升降杆(5-2)下端与紧固盘(5)固定连接;紧固盘(5)中轴线与通孔(1-1)中轴线垂直。9.根据权利要求8所述的超级预应力支护装置,其特征在于,所述紧固盘(5)包括盘体(5-1)和夹紧块(5-3);所述盘体(5-1)直径大于两个第三升降杆(5-2)之间的距离,盘体(5-1)中心处开有贯通盘体(5-1)上下表面的穿孔(5-1-2),穿孔(5-1-2)直径大于锚索(7)直径,穿孔(5-1-2)侧壁设有贯通盘体(5-1)上下表面的滑槽(5-1-1),穿孔(5-1-2)处滑槽(5-1-1)的两侧壁与穿孔(5-1-2)中轴线平行,与穿孔(5-1-2)相对的滑槽(5-1-1)侧壁为斜面,斜面上边缘与盘体(5-1)中心的距离小于斜面下边缘与盘体(5-1)中心的距离;所述夹紧块(5-3)为梯形,夹紧块(5-3)厚度与滑槽(5-1-1)两侧壁间距相匹配,夹紧块(5-3)的其中一个腰与夹紧块(5-3)的底面垂直,夹紧块(5-3)的另一个腰与夹紧块(5-3)的底面的夹角同斜面与盘体(5-1)底面的夹角相同,夹紧块(5-3)高度大于盘体(5-1)高度,与底面垂直的夹紧块(5-3)的腰上开有与锚索(7)相匹配的弧面。
10.一种权利要求7所述的超级预应力支护装置的支护方法,其特征在于,所述方法包括以下步骤:s01、将两个第二升降杆(4-1)的初始位置设置为一个处于最大的伸长状态,一个处于最大的收缩状态;s02、将锚索(7)从通孔(1-1)穿入,然后穿过2个锚索抓手(4-2)的中轴线;s03、先手动将锚索(7)送入钻孔直到无法再推进;s04、控制器(10)控制处于最大的收缩状态的第二升降杆(4-1)上的锚索抓手(4-2)抓紧锚索(7);控制处于最大的伸长状态的第二升降杆(4-1)上的锚索抓手(4-2)张开角度最大,设第一状态为第二升降杆(4-1)处于最大的伸长状态且锚索抓手(4-2)张开角度最大,第二状态为第二升降杆(4-1)处于最大的收缩状态且锚索抓手(4-2)夹合角度最小;s05、控制器(10)控制处于第二状态的第二升降杆(4-1)伸长直到对应的位置反馈传感器(8)检测到第二升降杆(4-1)伸长长度处于最大值,控制处于第一状态的第二升降杆(4-1)收缩对应的位置反馈传感器(8)检测到第二升降杆(4-1)伸长长度处于最小值,将两根第二升降杆(4-1)状态互换,跳转到步骤s05直到索锚被送到指定位置或者收到外界终止命令;其中,判断第二升降杆(4-1)的状态的方法为,如果第二升降杆(4-1)对应的位置反馈传感器(8)检测到第二升降杆(4-1)伸长长度处于最大值,且对应的轻触开关(4-2-9)状态为关,则第二升降杆(4-1)的状态为第一状态,如果第二升降杆(4-1)对应的位置反馈传感器(8)检测到第二升降杆(4-1)伸长长度处于最小值,且对应的轻触开关(4-2-9)状态为开,则第二升降杆(4-1)的状态为第二状态。
技术总结
本发明公开了一种超级预应力支护装置,所述装置包括底板、托盘夹具、送锚机构和张拉机构;所述底板上开有贯通底板上下表面的通孔,通孔直径大于锚索直径,底板上部固定连接第一升降杆,第一升降杆伸缩方向与通孔中轴线平行,所述第一升降杆上端固定连接托盘夹具;所述托盘夹具与托盘下表面形状相匹配,托盘夹具中轴线与通孔中轴线重合;所述底板上部还设有送锚机构,送锚机构与锚索相匹配,送锚机构中轴线与通孔重合;所述底板下部固定连接张拉机构,张拉机构与锚索相匹配,张拉机构中轴线与通孔重合。以解决现有技术的锚索支护装置工作效率较低的问题。效率较低的问题。效率较低的问题。
技术研发人员:曹俊才 安铁梁 徐再刚 池恩安 熊光林 吴燚 邓恩德 李杰 陈永松 杨乘
受保护的技术使用者:贵州盘江煤电集团技术研究院有限公司
技术研发日:2022.11.09
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。