技术特征:
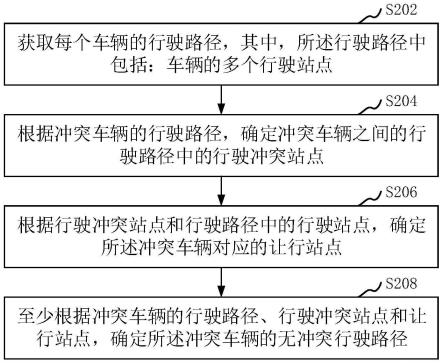
1.一种agv的路径规划方法,其特征在于,所述方法包括:获取每个车辆的行驶路径,其中,所述行驶路径中包括:车辆的多个行驶站点;根据冲突车辆的行驶路径,确定冲突车辆之间的行驶路径中的行驶冲突站点,其中所述冲突车辆包括:行驶路径存在冲突的车辆;根据行驶冲突站点和行驶路径中的行驶站点,确定所述冲突车辆对应的让行站点;至少根据冲突车辆的行驶路径、行驶冲突站点和让行站点,确定所述冲突车辆的无冲突行驶路径。2.根据权利要求1所述的方法,其特征在于,所述行驶站点包括:行驶终点站点,所述至少根据冲突车辆的行驶路径、行驶冲突站点和让行站点,确定所述冲突车辆的无冲突行驶路径,包括:响应于第一行驶终点站点在第二行驶路径中,或者所述冲突车辆中第二车辆行驶进入所述行驶冲突站点,则确定所述冲突车辆中第一车辆让行;根据所述第一车辆的行驶路径和让行站点,确定所述第一车辆的无冲突行驶路径;其中,所述第一行驶终点站点为所述冲突车辆中第一车辆的行驶终点站点,所述第二行驶路径为所述冲突车辆中第二行驶车辆的行驶路径。3.根据权利要求1所述的方法,其特征在于,所述至少根据冲突车辆的行驶路径、行驶冲突站点和让行站点,确定所述冲突车辆的无冲突行驶路径,还包括:响应于所述冲突车辆均未行驶进入所述行驶冲突站点,则根据预先设置的所述冲突车辆的优先级和所述冲突车辆的行驶路径的优先级,确定所述冲突车辆中让行车辆;根据所述让行车辆的行驶路径和让行站点,确定所述让行车辆的无冲突行驶路径。4.根据权利要求1所述的方法,其特征在于,所述至少根据冲突车辆的行驶路径、行驶冲突站点和让行站点,确定所述冲突车辆的无冲突行驶路径,还包括:响应于所述冲突车辆均行驶进入所述行驶冲突站点,根据与所述冲突车辆距离最近的让行站点、预先确定的所述冲突车辆行驶进入所述行驶冲突站点时所对应的行驶路径的权重值,确定所述冲突车辆中让行车辆;控制所述让行车辆行驶至与所述冲突车辆距离最近的所述让行站点;根据所述让行车辆的行驶路径、所述让行站点,确定所述让行车辆的无冲突行驶路径。5.根据权利要求1所述的方法,其特征在于,所述获取每个车辆的行驶路径,包括:获取区域地图,所述区域地图包括:多个站点;确定所述车辆在所述区域地图中的行驶起点站点和行驶终点站点;根据所述行驶起点站点、行驶终点站点和所述区域地图中多个站点确定每个车辆的至少一条行驶路径。6.根据权利要求5所述的方法,其特征在于,所述根据行驶冲突站点和行驶路径中的行驶站点,确定所述冲突车辆对应的让行站点,至少包括下述中一种:根据所述行驶冲突站点之前的所述冲突车辆的行驶路径中的行驶站点,确定所述冲突车辆对应的让行站点;根据所述区域地图中,所述冲突车辆的行驶站点之外且与其他车辆不存在路径冲突的站点,确定所述冲突车辆对应的让行站点。7.根据权利要求5所述的方法,其特征在于,所述根据所述行驶起点站点、行驶终点站
点和所述区域地图中多个站点确定每个车辆的至少一条行驶路径,包括:根据所述行驶起点站点、行驶终点站点和所述区域地图中多个站点,并利用递归查找算法,确定每个车辆的多个行驶路径;根据多个行驶路径中所述车辆行驶的距离和所述车辆之间的行驶冲突站点的数量,确定每个行驶路径对应的权重值;根据每个行驶路径对应的权重值,确定每个车辆的至少一条行驶路径。8.根据权利要求7所述的方法,其特征在于,所述获取区域地图,包括:响应于所述区域地图大于预先设置的区域范围,则根据所述区域地图中的多个站点对所述区域地图进行拆分,得到多个拆分区域地图;所述根据所述行驶起点站点、行驶终点站点和所述区域地图中多个站点,并利用递归查找算法,确定每个车辆的多个行驶路径,包括:获取所述拆分区域地图之间的连接站点;根据所述行驶起点站点、行驶终点站点、所述拆分区域地图中多个站点和所述连接站点,并利用递归查找算法,确定每个车辆的多个行驶路径。9.一种agv的路径规划装置,其特征在于,所述装置包括:路径获取模块,用于获取每个车辆的行驶路径,其中,所述行驶路径中包括:车辆的多个行驶站点;冲突站点确定模块,用于根据冲突车辆的行驶路径,确定冲突车辆之间的行驶路径中的行驶冲突站点,其中所述冲突车辆包括:存在路径冲突的车辆;让行站点确定模块,用于根据行驶冲突站点和行驶路径中的行驶站点,确定所述冲突车辆对应的让行站点;路径规划模块,用于至少根据冲突车辆的所述行驶路径、行驶冲突站点和让行站点,确定所述冲突车辆的无冲突行驶路径。10.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至8中任一项所述的方法的步骤。
技术总结
本公开涉及一种AGV的路径规划方法、装置、计算机设备。所述方法包括:获取每个车辆的行驶路径,其中,所述行驶路径中包括:车辆的多个行驶站点;根据冲突车辆的行驶路径,确定冲突车辆之间的行驶路径中的行驶冲突站点,其中所述冲突车辆包括:行驶路径存在冲突的车辆;根据行驶冲突站点和行驶路径中的行驶站点,确定所述冲突车辆对应的让行站点;至少根据冲突车辆的行驶路径、行驶冲突站点和让行站点,确定所述冲突车辆的无冲突行驶路径。采用本方法能够在存在多个冲突段时,能够确定AGV的避让位置,不会使AGV停止工作。不会使AGV停止工作。不会使AGV停止工作。
技术研发人员:赵鑫
受保护的技术使用者:苏州华兴源创科技股份有限公司
技术研发日:2022.11.08
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。