1.本发明涉及手术机器人技术领域,尤其涉及一种手术机器人器械转接机构及器械驱动座。
背景技术:
2.随着科学技术与医疗技术的发展,腹腔内窥镜手术系统以其手术操作更精准、高效、舒适的优点,使其在微创手术中的应用越来越广泛。
3.在腹腔内窥镜手术时,需要在腹腔内窥镜手术机器人驱动器和无菌适配器之间找到一个合适的转接机构,以使腹腔镜手术机器人驱动器和无菌适配器之间能够快速、准确和可靠的形成对接,以便将驱动力传输给器械。
4.市场上现有的连接机构不尽人意,专利cn106667579a提供了一种用于腹腔镜手术机器人器械连接机构,其在微器械下盖和微器械上盖之间设置具有浮动位移量的弹簧,其在微器械下盖与微器械上盖之间设置限位螺钉,其在微器械下盖与微器械上盖之间采用单平面配合作导向。其存在的缺陷有:第一,无导向的弹簧压缩易发生失稳;第二,紧定螺钉作微器械上盖上下浮动的限位螺钉,微器械上盖多次撞击限位螺钉易造成螺钉松动,导致功能失效;第三,平面配合作导向易造成微器械下盖与微器械上盖之间的晃动量较大。
技术实现要素:
5.发明目的:针对现有技术之不足,本发明提供一种手术机器人器械连接机构及器械驱动座,结构简单、轻便可靠、拆装方便,可以实现微器械上盖的上下伸缩移动,且具有导向稳定,减小微器械下盖和微器械上盖的晃动的作用。
6.技术方案:
7.一种手术机器人器械转接机构,包括:
8.微器械下盖,固定于电机输出轴上,其上设有第一磁体;
9.微器械上盖,滑动且无转动地套设于所述微器械下盖上,其上设有第二磁体;
10.所述第一磁体、第二磁体分别位于微器械下盖、微器械上盖的中心轴线上且二者极性相同。
11.所述微器械上盖内部具有浮动空腔,所述微器械下盖位于所述浮动空腔中;所述微器械上盖底端具有开孔,电机输出轴穿过所述开孔连接所述微器械下盖。
12.所述微器械上盖包括上盖体和限位盖,所述限位盖固定于上盖体底端与上盖体共同围成所述浮动空腔。
13.在所述微器械下盖侧壁上设有至少一条沿轴线延伸的凸条,所述浮动空腔具有与所述凹条适配的凹槽。
14.所述微器械下盖、所述浮动空腔均为十字花型。
15.在所述微器械下盖底端设有电机轴孔,侧壁设有螺孔,通过将紧定螺钉置入所述螺孔内将所述微器械下盖固定于电机输出轴上。
16.所述螺孔为两个,对称设于微器械下盖侧壁上。
17.所述微器械上盖侧壁开设有用于穿设紧定螺钉的腰孔,所述紧定螺钉在所述微器械上盖上下浮动过程中不触碰所述腰孔的孔壁。
18.所述微器械下盖与所述微器械上盖相对滑动的最大距离小于所述腰孔的长度。
19.所述紧定螺钉的长度小于等于所述螺孔的深度。
20.一种手术机器人器械驱动座,包括:
21.如前述的手术机器人器械转接机构;
22.电机,设置于驱动座内,其输出轴与所述微器械下盖固定连接。
23.有益效果:本发明通过在微器械下盖和微器械上盖之间设置一对磁性相同的磁铁,使得微器械上盖相对于微器械下盖具有一浮动位移量,从而实现微器械上盖的上下浮动移动,无弹簧受压失稳问题;且有效克服了以紧定螺钉为浮动限位机构易导致螺钉碰撞松动问题,同时可以减小上下浮动的晃动,具有结构简单、轻便可靠、拆装方便的优点。
附图说明
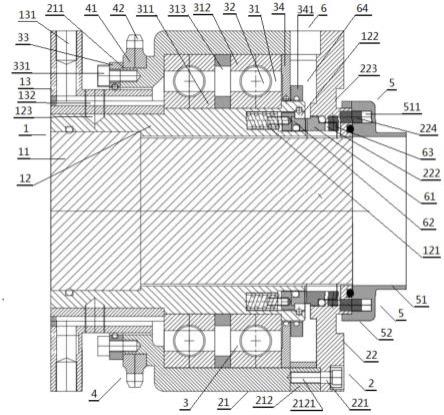
24.图1是本发明的器械转接机构结构示意图;
25.图2是本发明转接机构安装在驱动座上的结构示意图;
26.图3是本发明微器械下盖的结构示意图;
27.图4是本发明上盖体的结构示意图;
28.图5是本发明器械转接机构的使用示意图。
29.其中,a.微器械下盖,b.微器械上盖;
30.1.下盖体,2.第一磁体;
31.3.上盖体,4.第二磁体,5.限位盖;
32.6.驱动座外壳,7.电机;
33.8.无菌适配器,9.转接座;
34.11.螺孔,12.凸条;31.腰孔,32.滑槽,33.凹槽,34.凸块;
35.81.转接轴,91.寻零限位环。
具体实施方式
36.下面结合附图和具体实施例,进一步阐明本发明。
37.图1是本发明的结构示意图,如图1所示,本发明的手术机器人器械转接机构包括微器械下盖a和微器械上盖b,微器械上盖b套设于与微器械下盖a外,且微器械上盖b可相对于微器械下盖a上下浮动。
38.如图1、2所示,所述微器械下盖a包括下盖体1及固定于下盖体1上的第一磁体2。
39.所述微器械上盖b包括上盖体3、固定于上盖体3上的第二磁体4以及与上盖体3底端固定连接的限位盖5。
40.本发明中,上盖体3为内部具有空腔的圆柱体,限位盖5通过螺钉固定于上盖体3底端,从而与上盖体3形成可容纳下盖体1上下运动的浮动空腔,下盖体1位于所述浮动空腔内且与所述浮动空腔形状适配;限位盖5上设开孔,电机7输出轴穿过限位盖5上开孔后与位于所述浮动空腔内的下盖体1固定连接,从而使得位于微器械上盖b内的下盖体1可被位于所
述微器械上盖b外的电机7驱动实现微器械上盖b在浮动空腔内的上下运动。
41.本发明中,第一磁体2和第二磁体4分别固定于下盖体1和上盖体3顶端,第一磁体2和第二磁体4共轴且极性相同,磁体具体可为磁铁;两磁体间互斥力使上盖体3受到远离下盖体1方向的磁力而发生上浮;初始时上盖体3在磁力作用由下向上运动,上盖体3带动限位盖5同步向上运动,当限位盖5接触到下盖体1底端时被限位使得上盖体3被限位停止向上运动,从而实现微器械上盖b的上浮限位;上盖体3受外力被下压时,上盖体3向下运动,当上盖体3顶端触碰下盖体1顶端时被限位停止向下运动,从而实现微器械上盖b的下浮限位。
42.参照图1-3,本发明的下盖体1底端设有电机轴孔,侧壁上开设有螺孔11,通过将紧定螺钉置入螺孔11内将下盖体1固定于电机7的输出轴上;在上盖体3的侧壁上对应螺孔11位置处开设有腰孔31,腰孔31长度方向为高度方向,即图中的上下方向;装配时,通过腰孔31将紧定螺钉置入螺孔11中。
43.本发明中,紧定螺钉长度优选小于等于螺孔11深度,即紧定螺钉整体均置于螺孔11内,其末端并未伸出至腰孔31。这么设置可使微器械上盖b上下浮动过程中,腰孔31边缘不会撞击紧定螺钉末端,从而克服背景技术中提及的紧固螺钉受撞击松动问题。
44.本发明中,紧定螺钉长度也可大于所述螺孔11深度,此情况下,紧定螺钉末端伸出至腰孔31,那么紧定螺钉会随着上盖体3的上下浮动在腰孔31内相对上下活动;进一步地,下盖体1位于浮动空腔内的活动距离小于腰孔31的长度,也即上盖体3相对于下盖体1的最大浮动高度应小于腰孔31的长度,使上盖体3相对于下盖体1上下浮动时,紧定螺钉末端不触碰腰孔31孔壁,进而避免紧定螺钉受腰孔31撞击松动。
45.进一步地,在本发明中,在下盖体1侧壁上相对位置处各成型有一个螺孔11。
46.如图1、3所示,在下盖体1的侧壁上设有至少一沿轴线延伸的凸条12,对应地,上盖体3的浮动空腔设有相应的滑槽32,下盖体1和上盖体3通过凸条12与滑槽32的配合实现二者的滑动配合,对于下盖体1与上盖体3之间的滑动配合起导向作用,实现上盖体3以下盖体1为导轨的轴向运动的同时防止二者之间的相对转动,实现周向限位。
47.进一步地,在下盖体1的侧壁上对称设有两个沿轴线延伸的凸条12,上盖体3的中空结构与其适配。
48.更进一步地,在下盖体1的侧壁上均匀设有四个沿轴线延伸的凸条12,从而形成十字花型结构,对应的,微器械上盖b的浮动空腔设计为相应的十字花体,通过如此设计,不仅能够实现微器械上盖b上下浮动的轴向和周向限位,因为十字花体为多面多边结构,还能克服背景技术中提及微器械下盖a与微器械上盖b之间平面配合限位易造成的晃动量较大的问题;配合第一磁体2和第二磁体4设置,微器械上盖b在下压后由磁力提供上浮力,无需弹簧,不存在无导向的弹簧压缩失稳的问题。
49.更进一步地,在上盖体3上端设有用于与无菌适配器8的转接轴81上凸起适配的凹槽33。
50.更进一步地,在上盖体3侧壁设有用于与转接座9寻零限位环91适配的凸块34。
51.本发明还提供一种手术机器人器械驱动座,包括上述器械转接机构、驱动座外壳6、电机7,如图2、4所示,电机7设于器械驱动座外壳6内,电机7的输出轴穿过驱动座外壳6顶端后,穿过微器械上盖b的限位盖5上的开孔并与位于浮动空腔内的下盖体1固定连接。
52.本发明的工作原理如图5所示:
53.器械转接机构固定于电机7的输出轴上后,微器械上盖b因第一磁体2和第二磁体4之间的互斥力在微器械下盖a上以下盖体1为导轨上浮,当限位盖5触碰到下盖体1底部时停止上浮,此时微器械上盖b位于最高位。电机7运转,驱动输出轴转动带动微器械下盖a转动,进而带动微器械上盖b转动,此时器械转接机构转动不受限制。
54.当在器械驱动座上安装上转接座9后,转接座9上设有转接孔,转接孔顶端设有寻零限位环91,上盖体3顶端伸出转接孔,上盖体3侧壁上的凸块34抵接寻零限位环91,使得微器械上盖b被寻零限位环91下压受到下压力,微器械上盖b以下盖体1为导轨微量下浮;
55.电机7运转,驱动器械转接机构在转接座9转接孔内转动,微器械上盖b受磁力作用其上凸块34始终抵紧寻零限位环91下壁并在其上做圆周运动,因寻零限位环91上设有零位凹槽,凸块34落入零位凹槽时,器械转接机构转动被限制,电机7堵转。
56.当在转接座9上进一步安装上无菌适配器8时,无菌适配器8上的转接轴81下压上盖体3,上盖体3克服第一磁体2和第二磁体4之间的磁性互斥力使得微器械上盖b以下盖体1为导轨向下浮动,使得凸块34脱离寻零限位环91上的零位凹槽,器械转接机构的转动限制解除,因第一磁体2和第二磁体4之间的磁性互斥力的存在,微器械上盖b始终顶紧转接轴81;电机7驱动器械转接机构转动使得上盖体3上的连接孔33与无菌适配器8连接轴81上凸起接合,完成驱动转接,即电机7产生的扭矩依次经由微器械下盖a、微器械上盖b、无菌适配器8的连接轴81转接至末端器械。
57.本发明通过上述设计可以有效避免无菌适配器8安装时的作用力作用在器械驱动座上,具有一个缓冲的作用;另外微器械上盖b内浮动空腔有限,以浮动空腔为限位,以及微器械上盖b在微器械下盖a上的浮动距离小于腰孔31的长度,可以有效防止紧固螺钉撞击腰孔31造成紧固螺钉松动。
58.本发明通过在下盖体1和上盖体3上设置一对磁性相同的磁体,使得上盖体3相对于下盖体1具有一浮动位移量,从而实现上盖体3的上下浮动移动,无弹簧受压失稳问题;且本发明设置一限位盖5限制微器械上盖b内浮动空腔大小,从而实现微器械上盖b在微器械下盖a上的浮动限位,克服了以紧定螺钉为浮动限位机构易导致紧定螺钉与腰孔31之间发生碰撞导致的松动问题;此外,本发明设置十字型的下盖体1和具有十字型内腔的上盖体3配合,多边多面配合,从而减小上盖体3沿下盖体1和上下浮动的晃动,具有结构简单、轻便可靠、拆装方便的优点。
59.以上详细描述了本发明的优选实施方式,但是本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换(如数量、形状、位置等),这些等同变换均属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。