技术特征:
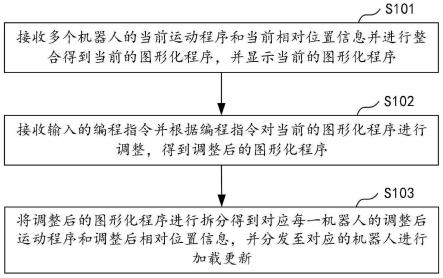
1.一种基于多机器人协作的图形化编程方法,其特征在于,包括:接收多个机器人的当前运动程序和当前相对位置信息并进行整合得到当前的图形化程序,并显示当前的所述图形化程序;接收输入的编程指令并根据所述编程指令对当前的所述图形化程序进行调整,得到调整后的图形化程序;将调整后的所述图形化程序进行拆分得到对应每一机器人的调整后运动程序和调整后相对位置信息,并分发至对应的机器人进行加载更新。2.根据权利要求1所述的基于多机器人协作的图形化编程方法,其特征在于,所述接收多个机器人的当前运动程序和当前相对位置信息并进行整合得到当前的图形化程序,并显示当前的所述图形化程序,包括:接收每一机器人的当前运动程序和当前相对位置信息,得到每一机器人的空间点和轨迹的使用状态,其中,所述空间点包括机器人的工作位,所述轨迹为机器人在两个工作位之间的移动路径;所述使用状态表示是否可移动、是否锁定、是否可到达、是否使用、是否非法中的一种或多种;将所有机器人的空间点和轨迹的使用状态以整体工程的方式进行整合,得到当前的图形化程序,并显示当前的所述图形化程序。3.根据权利要求2所述的基于多机器人协作的图形化编程方法,其特征在于,所述图形化程序为二维或三维图形化程序,所述图形化程序中的空间点和轨迹以外显特征进行状态标识。4.根据权利要求3所述的基于多机器人协作的图形化编程方法,其特征在于,所述外显特征包括颜色、文字和形状中的一种或多种。5.根据权利要求2所述的基于多机器人协作的图形化编程方法,其特征在于,所述编程指令包括拖拽空间点、按顺序划线连接空间点、点击编程选项中的一种或多种。6.根据权利要求2-5任一项所述的基于多机器人协作的图形化编程方法,其特征在于,所述接收输入的编程指令并根据所述编程指令对当前的所述图形化程序进行调整,包括:接收输入的空间点添加指令,根据所述空间点添加指令在当前的所述图形化程序中添加新的空间点,并将新的空间点与选定的机器人绑定;和/或,接收输入的轨迹添加指令,根据所述轨迹添加指令在当前的所述图形化程序中添加新的轨迹,并将新的轨迹与选定的机器人绑定。7.根据权利要求2-5任一项所述的基于多机器人协作的图形化编程方法,其特征在于,所述接收输入的编程指令并根据所述编程指令对当前的所述图形化程序进行调整,还包括:接收输入的空间点更改指令,根据所述空间点更改指令在当前的所述图形化程序中对选定的空间点的属性进行更改;其中,所述空间点的属性包括:所绑定的机器人编号、位置、空间点编号中的一种或多种;和/或,接收输入的轨迹更改指令,根据所述轨迹更改指令在当前的所述图形化程序中对选定的轨迹的属性进行更改,其中,所述轨迹的属性包括:起止点、过程点、轨迹编号、速度和指令中的一种或多种。8.根据权利要求2-5任一项所述的基于多机器人协作的图形化编程方法,其特征在于,
所述接收输入的编程指令并根据所述编程指令对当前的所述图形化程序进行调整,还包括:接收输入的空间点删除指令,根据所述空间点删除指令在当前的所述图形化程序中对选定的空间点进行删除;和/或,接收输入的轨迹删除指令,根据所述轨迹删除指令在当前的所述图形化程序中对选定的轨迹进行删除。9.根据权利要求2-5任一项所述的基于多机器人协作的图形化编程方法,其特征在于,还包括:利用所述图形化程序对待生产物品的工序进行轨迹分析,当存在多个机器人均可完成同一工序时,则输出对应多个轨迹时间图,当每一工序均仅由任意一个机器人完成时,则输出一个轨迹时间图;当输出多个所述轨迹时间图时,选择完成单个待生产物品所需时间最少的轨迹时间图作为推荐。10.根据权利要求9所述的基于多机器人协作的图形化编程方法,其特征在于,所述当输出多个所述轨迹时间图时,选择完成单个待生产物品所需时间最少的轨迹时间图作为推荐,包括:将每一所述轨迹时间图中的单个机器人作为分类;取每一所述轨迹时间图中单个机器人的最长用时;选择最长用时为最小的所述轨迹时间图作为推荐。11.一种基于多机器人协作的图形化编程装置,其特征在于,包括:整合单元,用于接收多个机器人的当前运动程序和当前相对位置信息并进行整合得到当前的图形化程序,并显示当前的所述图形化程序;编程单元,用于接收输入的编程指令并根据所述编程指令对当前的所述图形化程序进行调整,得到调整后的图形化程序;拆分单元,用于将调整后的所述图形化程序进行拆分得到对应每一机器人的调整后运动程序和调整后相对位置信息,并分发至对应的机器人进行加载更新。12.一种计算机设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至5中任一项所述的基于多机器人协作的图形化编程方法。13.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序当被处理器执行时使所述处理器执行如权利要求1至5任一项所述的基于多机器人协作的图形化编程方法。
技术总结
本发明公开了一种基于多机器人协作的图形化编程方法及相关组件,其涉及机器人编程技术领域。该方法包括:接收多个机器人的当前运动程序和当前相对位置信息并进行整合得到当前的图形化程序,并显示当前的图形化程序;接收输入的编程指令并根据编程指令对当前的图形化程序进行调整,得到调整后的图形化程序;将调整后的图形化程序进行拆分得到对应每一机器人的调整后运动程序,并分发至对应的机器人进行加载更新。本发明可以在机器人群中任选一台机器人通过视图显示整个机器人群的图形化程序,更直观展示出整个机器人群的空间点和轨迹以便进行调试。轨迹以便进行调试。轨迹以便进行调试。
技术研发人员:李俊林 刘子静 颜鲁齐 殷伟豪
受保护的技术使用者:珠海格力电器股份有限公司
技术研发日:2022.11.07
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。