1.本发明属于船舶定位技术领域,具体涉及一种面向海岸场景的基于深度学习的船舶定位方法,对基站个数较少(比如四个基站),且目标在特殊gdop (geometric dilution precision,几何精度因子)的海岸场景下的nlos(non-lightof sight,非视距传播)误差消除仍适用。
背景技术:
2.海洋环境对维持世界经济和我们的日常生活起着至关重要的作用。众所周知,海洋不仅是众多海洋物种生活的空间,也是航海、巡航、捕鱼、货物运输等人类活动的场所。近年来,船舶数量与水域交通密度以及危险货物装载量的不断增加给海事交通安全带了了潜在的威胁。频繁发生的海损事故,将会造成生命与财产的重大损失,而且对邻近水域的海洋生态环境会造成严重的破坏。
3.近二十年来,ais(automatic identification system,船舶自动识别系统)被广泛应用于海事领域,用于监控海上交通,避免船舶碰撞。然而,我们面临的主要现实问题是一些船舶不保持ais系统的正常工作状态,在设备中输入虚假信息。因此,ais信号无法被其他船舶和陆上服务机构有效接收,直接影响ais设备的有效性,严重威胁水上交通安全。这就导致了海上监视的诸多问题。
4.为了保证沿海航行安全,imo(international maritime organization,国际海事组织)制订的世界无线电导航计划中倡导世界各成员国为现有ais船站增加测距定位功能,即ais-r模式。ais-r模式通过无线电子测量方式获得船舶到陆地基站之间的距离进行定位。然而在实际应用过程中,nlos路径是影响定位精度的重要因素。信号在传播过程中由于缺乏los(light of sight,视距传播)路径,信号只能通过穿透、反射、绕射或散射路径到达接收器。nlos条件下信号的传播会导致测距出现正偏差,严重影响定位精度。目前的大多数研究都是基于蜂窝网络,假设目标位于具有足够基站并且具有良好的gdop条件。但是关于海岸特殊gdop场景下基站数量较少、nlos传播更严重的定位问题的研究较少。这种场景在工程上又具有很强的应用背景和实用价值。
技术实现要素:
5.针对海岸这种特殊场景下由于nlos误差引起的定位精度低的问题,本发明提供一种面向海岸场景的基于深度学习的船舶定位方法,得到更为准确的目标船舶定位。
6.本发明的具体步骤如下:
7.步骤1:采用nb个基站对试验目标进行测距,计算得到使系统误差最小时的斜率k和截距b,并得到各基站消除系统误差后的测量距离d
′
mi
;最小二乘法拟合式如下:
8.9.其中,k表示最小二乘法拟合后直线的斜率,b表示最小二乘法拟合后直线的截距,d
ti
表示第i个基站与试验目标的真实距离,d
mi
表示第i个基站消除系统误差前的测量距离。
10.步骤2:设所需的最小基站数为m,由于基站总数为nb,则得到满足最小基站数要求的种不同的基站组合。然后,对于每一种基站组合中各基站消除系统误差后的测量距离d
′
mi
,基于pso的三边定位方法,并引入粒子群算法寻找每一种基站组合确定的试验目标最佳定位位置。
11.步骤3:根据各基站位置坐标、步骤2中每一种基站组合确定的试验目标最佳定位位置和试验目标位置坐标得到一个n
pos
×
2的坐标矩阵:
[0012][0013]
其中为第p个基站组合确定的试验目标最佳定位位置,n在{m,m 1,
…
,nb}中取值,(x
ms
,y
ms
) 为试验目标位置坐标,(x
bsi
,y
bsi
)为第i个基站的位置坐标。
[0014]
通过平面直角坐标系将坐标矩阵m转化为二维像素矩阵,将二维像素矩阵作为densenet模型的数据集。
[0015]
步骤4:通过步骤3构建的数据集对densenet模型进行训练,采用训练后的 densenet模型估计目标船舶的位置。
[0016]
进一步地,所述粒子群算法的步骤如下:
[0017]
step1:以试验目标位置为优化目标,使用x
pj
=(x
pj
,y
pj
)和v
pj
=(v
pj
,v
pj
)来表示第j个粒子的位置和速度,初始化粒子群,每一个粒子的速度v
pj
=(v
pj
,v
pj
)和位置x
pj
=(x
pj
,y
pj
)在初始化时取随机值。
[0018]
step2:建立适应度函数,确定粒子群中粒子每一次迭代的适应值,第j个粒子的适应度函数定义如下:
[0019][0020]
其中,n在{m,m 1,
…
,nb}中取值,第p个基站消除系统误差后的测量距离表达式为:
[0021][0022]
其中(x
ms
,y
ms
)表示试验目标位置坐标,(x
bsp
,y
bsp
),p∈(1,2,
…
,s)表示第p个基站位置坐标,n
p
表示第p个基站的nlos误差。
[0023]
step3:粒子群在迭代过程中跟踪粒子的最优值x
prej
=(x
prej
,y
prej
)和粒子群全局最优值xg=(xg,yg),若根据当前粒子群全局最优值xg计算得到的适应度值小于预设误差值,则结束,得到每一种基站组合确定的试验目标最佳定位位置 (x
esp
,y
esp
),p∈{1,2,
3,
…
,s},否则判断粒子群中的每一个粒子当前的适应度值是否比根据上次该粒子迭代记录的最优值x
prej
得到的适应度值更优,是则更新该粒子的最优值x
prej
,且判断粒子群中的每一个粒子当前的适应度值是否比上次迭代记录的粒子群全局最优值xg得到的适应度值更优,是则更新粒子群全局最优值xg。
[0024]
进一步地,第j个粒子的速度和位置更新规则如下:
[0025][0026]
其中t表示迭代数,c1和c2表示学习因子,r1和r2是介于[0,1]之间的随机概率值。
[0027]
进一步地,步骤3构建的数据集中选取一部分作为训练集,另一部分作为验证集,对densenet模型进行训练和验证。
[0028]
本发明具有的有益效果在于:
[0029]
本发明通过数据增强产生初步定位特征,然后通过densenet模型有效识别出数据增强后的nlos噪声环境的定位特征,得到更为准确的目标船舶定位。其中,数据增强是通过分组预定位的方法产生多个预定位坐标特征,将原始距离数据按照基站分组,对每一组距离数据采用数学模型进行初步定位,产生初步定位特征,在基站数量较少的情况下最大限度的利用了距离特征以及基站位置特征。 densenet是一种面向强噪声或者高度冗余数据的特征学习方法,采用信息重用的方式使提取的数据更加完整,通过该模型可以有效的识别出数据增强后的nlos 噪声环境的定位特征,能够在基站更少的海岸场景下有效缓解nlos误差。
附图说明
[0030]
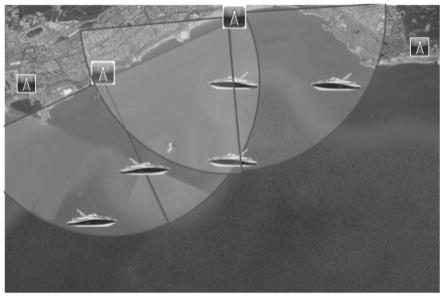
图1是海岸场景下的定位模型图。
[0031]
图2是坐标矩阵转化为二维像素矩阵后生成的特征图像。
[0032]
图3是具有三个稠密块和两个过渡层的densenet结构图。
具体实施方式
[0033]
下面结合附图,对本发明作进一步详细描述。
[0034]
系统误差和nlos误差是影响基站测距精度的主要原因。在海岸这种特殊场景中基站较少且目标位于由多个基站组成的多边形之外,特别在los基站的数量相对较少的情况下,los基站很难补偿nlos误差,而nlos误差一般比系统误差大得多,因此,这种情况会严重影响定位精度。
[0035]
第i个基站的测量距离d
mi
可以表示为:
[0036]dmi
=d
ti
ei ni,i=1,2,3,
…
,nb[0037]
其中,d
ti
表示第i个基站与目标之间的实际距离;ei表示第i个基站的系统误差,遵循均值为0的高斯随机变量;ni表示第i个基站的nlos误差,并假设服从0.05d
ti
与0.9d
ti
之间的独立同分布。
[0038]
本发明一种面向海岸场景的基于深度学习的船舶定位方法,具体步骤如下:
[0039]
步骤1、消除各基站测量距离的系统误差。系统误差主要包括激光发射延迟误差和探测电路延时误差。由于激光雷达采用了光电-电光转换法进行测距,驱动激光器的电学信号从激励激光器到激光器发光之间存在延时时间,该延迟时间与激光器本身的特征有关,属于线性误差。因此,系统误差可以通过偏置校正进行调整,以消除激光发射延迟误差部分。而激光发射延迟误差是系统误差的主要形式,消除了激光发射延迟误差,可视为消除系统误差。
[0040]
本发明采用nb个基站对试验目标进行测距,采用最小二乘法的偏置修正方法,即通过最小二乘法对测距进行拟合,计算得到使系统误差最小时的斜率k和截距b,并得到各基站消除系统误差后的测量距离d
′
mi
,提高测距精度;最小二乘法拟合式如下:
[0041][0042]
其中,k表示最小二乘法拟合后直线的斜率,b表示最小二乘法拟合后直线的截距,d
ti
表示第i个基站与试验目标的真实距离,d
mi
表示第i个基站消除系统误差前的测量距离,nb表示基站数量。
[0043]
步骤2、分组定位。海岸定位场景下的定位模型如图1所示。假设基站的总数量大于定位所需的最小数量,因此,可以以组合的方式得到多组定位基站。在二维定位场景中,至少需要三个基站来估计目标的位置。假设所需的最小基站数为m,基站总数量为nb,则得到种不同的基站组合。假设s
gi
表示基站数量为gi的组合,gi∈{nb,n
b-1
…
m}。以nb=4和m=3为例,存在5种可用的基站测距值组合,比如选用的基站组合为s4=(1,2,3,4),或基站组合为 s3=[(2,3,4)、(1,2,3)、(1,2,4)、(1,2,3)]。
[0044]
本发明对于每一种基站组合中各基站消除系统误差后的测量距离d
′
mi
,使用基于pso的三边定位方法初步估计试验目标位置,此时m=3。基于pso的三边定位方法是一种基于距离的无线定位算法。假设空间中有三个已知坐标的非共线基站,以基站坐标为圆心,测量距离为半径可以创建三个圆,圆的交点就是目标的定位坐标。但是,由于在大多数现实场景中存在各种误差,三个圆不会在特定点相交。因此本发明基于pso的三边定位方法初步估计目标位置时,引入粒子群算法寻找每一种基站组合确定的试验目标最佳定位位置。粒子群算法的基本原理是利用群体中的个体对信息的共享,从而使整个群体在问题求解空间中产生从无序到有序的演化过程,获得群体的最优解。粒子群算法主要关注粒子的位置和速度,本发明以试验目标位置为优化目标,使用x
pj
=(x
pj
,y
pj
)和v
pj
=(v
pj,x
,v
pj,y
) 来表示第j个粒子的位置和速度。
[0045]
粒子群算法的主要步骤如下:
[0046]
step1:初始化粒子数量为n
p
的粒子群,每一个粒子的速度v
pj
=(v
pj
,v
pj
)和位置x
pj
=(x
pj
,y
pj
)在初始化时取随机值。
[0047]
step2:建立适应度函数,确定粒子群中粒子每一次迭代的适应值 (fitnessvalue),第j个粒子的适应度函数定义如下:
[0048][0049]
其中,n在{m,m 1,
…
,nb}中取值,第p个基站消除系统误差后的测量距离表达式为:
[0050][0051]
其中(x
ms
,y
ms
)表示试验目标位置坐标,(x
bsp
,y
bsp
),p∈(1,2,
…
,s)表示第p个基站位置坐标,n
p
表示第p个基站的nlos误差。
[0052]
step3:粒子群在迭代过程中跟踪粒子本身的最优值x
prej
=(x
prej
,y
prej
)和粒子群全局最优值xg=(xg,yg),若根据当前粒子群全局最优值xg计算得到的适应度值小于预设误差值,则结束,得到每一种基站组合确定的试验目标最佳定位位置(x
esp
,y
esp
),p∈{1,2,3,
…
,s},否则判断粒子群中的每一个粒子当前的适应度值是否比根据上次该粒子迭代记录的最优值x
prej
得到的适应度值更优,是则更新该粒子的最优值x
prej
,且判断粒子群中的每一个粒子当前的适应度值是否比上次迭代记录的粒子群全局最优值xg得到的适应度值更优,是则更新粒子群全局最优值 xg。
[0053]
其中,第j个粒子的速度和位置更新规则如下:
[0054][0055]
其中t表示迭代数,c1和c2表示学习因子,r1和r2是介于[0,1]之间的随机概率值。
[0056]
步骤3、densenet模型的数据集构建。在基站数量为nb的定位系统的场景下,经过分组定位后可以得到一个n
pos
×
2的矩阵:
[0057][0058]
其中
[0059]
通过平面直角坐标系将坐标矩阵m转化为二维像素矩阵,将二维像素矩阵作为densenet模型的数据集。根据二维像素矩阵可生成特征图像,特征图像中每个像素点具有相同的大小和不同的颜色,通过像素点的颜色来区分基站位置坐标、基站组合确定的试验目标最佳定位位置和试验目标位置坐标,例如,基站位置坐标为黑色,rgb=(255,255,255),试验目标位置坐标为红色,rgb= (255,0,0),如图2所示。
[0060]
步骤4、通过步骤3构建的数据集对densenet模型进行训练,采用训练后的 densenet模型估计目标船舶的位置,得到更为准确的目标船舶定位。进一步地,可以在步骤3构建的数据集中选取一部分作为训练集,另一部分作为验证集,对 densenet模型进行训
练和验证;在训练阶段,使用不同场景下的大量仿真数据来训练模型。densenet是一种经典的drsn网络模型,它的主要优点是可以有效地处理含有噪声的数据,可以在前层和后层之间建立跳跃连接,使整个神经网络足够深,能够避免由于网络层太深引起的梯度消失问题,进而可以提取足够的特征,能够有效处理含有噪声数据的特征图像数据。由于大部分环境的nb个基站中是los基站与nlos基站混合的环境,本发明只对los基站与nlos基站混合的环境进行分析,nb个基站中某些组合不包含nlos测距值或比其他组合包含更少的nlos测距值,采用densenet模型可以给受nlos影响较小的这些组合中的基站测量距离分配较大的权重,从而有效减少nlos对目标船舶定位的影响。
[0061]
densenet模型的神经网络结构设计如图3所示,该模型由输入层、卷积层、 3个稠密块(denseblock)、2个过渡层(transitionlayer)、池化层、线性连接层以及输出层组成;输入层将二维像素矩阵作为输入,输出层输出目标船舶的最终估计位置;卷积层的主要作用是生成特征图,池化层是为了缓解卷积层对位置的过度敏感性。该网络结构的核心是稠密块,图3中稠密块内的黑色框代表一个卷积层,各层的输出数据保持相同数据规模,可以在channel(通道)维度上连接,每一层的输入由前面的所有卷积层输出组成。且稠密块中非线性组合函数是一个组合操作,采用的是归一化 修正线性单元 3*3卷积核的结构,通过信息重用的方式使提取的数据更加完整。其中,稠密块内第q层的输出xq表达式如下:
[0062]
xq=h([x1,x2,
…
,x
q-1
])
[0063]
其中h表示非线性组合函数,x1,x2,
…
,x
q-1
分别为第q层前面的各卷积层输出。
[0064]
而过渡层放在两个dense block中间,因为每个dense block结束后的输出 channel个数很多,需要通过1*1的卷积核来降维。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。