技术特征:
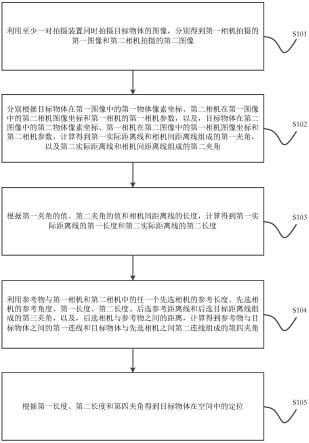
1.一种对视定位方法,其特征在于,包括:利用至少一对拍摄装置同时拍摄目标物体的图像,分别得到第一相机拍摄的第一图像和第二相机拍摄的第二图像;分别根据所述目标物体在所述第一图像中的第一物体像素坐标、所述第二相机在所述第一图像中的第二相机图像坐标和所述第一相机的第一相机参数,以及,所述目标物体在所述第二图像中的第二物体像素坐标、所述第一相机在所述第二图像中的第一相机图像坐标和第二相机参数,计算得到第一实际距离线和相机间距离线组成的第一夹角,以及第二实际距离线和所述相机间距离线组成的第二夹角,其中,所述第一实际距离线由所述目标物体与所述第一相机连线得到,所述相机间距离线由所述第一相机与所述第二相机连线得到,所述第二实际距离线由所述目标物体与所述第二相机连线得到;根据所述第一夹角的值、所述第二夹角的值和所述相机间距离线的长度,计算得到所述第一实际距离线的第一长度和所述第二实际距离线的第二长度;利用参考物与所述第一相机和所述第二相机中的任一个先选相机的参考长度、所述先选相机的参考角度、所述第一长度、所述第二长度、后选参考距离线和后选目标距离线组成的第三夹角,以及,所述后选相机与所述参考物之间的距离,计算得到所述参考物与所述目标物体之间的第一连线和所述目标物体与所述先选相机之间第二连线组成的第四夹角,其中,所述后选参考距离是指所述第一相机和所述第二相机中的另一个后选相机与所述参考物之间的连线,所述后选目标距离线是指所述后选相机与所述目标物体之间的连线;以及,根据所述第一长度、所述第二长度和所述第四夹角得到所述目标物体在空间中的定位。2.根据权利要求1所述的对视定位方法,其特征在于,所述第一夹角和所述第二夹角的计算过程,包括:根据当前相机的相机参数获取得到第三连线和拍摄轴之间的第五夹角,以及获取第四连线和拍摄轴之间的第六夹角,其中所述第三连线是指当前图像中的另一对视相机在当前图像中的对视相机像素点与焦距之间的连线,所述第四连线是指当前图像中所述目标物体在当前图像中的目标物体像素点与焦距之间的连线;根据所述焦距和所述当前图像的原点之间的焦距长度、以及所述第五夹角,利用三角函数计算得到所述对视相机像素点与焦距之间的第三长度,其中所述原点为所述拍摄轴与所述当前图像的交点;根据所述焦距长度以及所述第六夹角,利用三角函数计算得到所述目标物体像素点与焦距之间的第四长度;以及,根据所述原点与所述对视相机像素点之间的连线,和所述原点与所述目标物体像素点之间的连线组成第七夹角,并利用所述第七夹角、所述对视相机像素点与所述原点之间的距离、所述目标物体像素点与所述原点之间的距离,根据三角函数计算得到所述对视相机像素点与所述目标物体像素点之间的第五长度;利用所述第三长度、所述第四长度以及所述第五长度,计算得到第五连线和第六连线组成的夹角作为所述第一夹角或所述第二夹角,其中,所述第五连线是指所述目标物体像素点与所述焦距之间的连线,所述第六连线是指所述对视相机像素点与所述焦距之间的连线。
3.根据权利要求1所述的对视定位方法,其特征在于,所述根据所述第一长度、所述第二长度和所述第四夹角得到所述目标物体在空间中的定位,包括:根据所述第一夹角的值、所述第二夹角的值和所述相机间距离线的长度,计算得到所述目标物体和所述相机间距离线之间的垂线距离;根据所述垂线距离、所述第一长度、所述第二长度和所述第四夹角得到所述目标物体在空间中的定位。4.根据权利要求1所述的对视定位方法,其特征在于,获取所述目标物体在所述第一图像中的第一物体像素坐标、所述第二相机在所述第一图像中的第二相机图像坐标、所述目标物体在所述第二图像中的第二物体像素坐标、所述第一相机在所述第二图像中的第一相机图像坐标的过程,包括:利用像素对应函数对所述第一图像和所述第二图像进行处理,得到所述第一物体像素坐标、所述第二相机图像坐标、所述第二物体像素坐标和所述第一相机图像坐标。5.根据权利要求1所述的对视定位方法,其特征在于,所述利用至少一对拍摄装置同时拍摄目标物体的图像,分别得到第一相机拍摄的第一图像和第二相机拍摄的第二图像,还包括:利用矫正函数矫正所述所第一相机和所述第二相机拍摄的图像,从而得到所述第一图像和所述第二图像。6.根据权利要求4所述的对视定位方法,其特征在于,所述利用像素对应函数对所述第一图像和所述第二图像进行处理,得到所述第一物体像素坐标、所述第二相机图像坐标、所述第二物体像素坐标和所述第一相机图像坐标,包括:在利用所述当前图像未获取得到所述对视相机像素点的坐标时,通过延伸定位法和/或准星法计算得到所述对视相机像素点的坐标。7.一种对视定位装置,其特征在于,包括:拍摄模块,用于利用至少一对拍摄装置同时拍摄目标物体的图像,分别得到第一相机拍摄的第一图像和第二相机拍摄的第二图像;角度计算模块,用于分别根据所述目标物体在所述第一图像中的第一物体像素坐标、所述第二相机在所述第一图像中的第二相机图像坐标和所述第一相机的第一相机参数,以及,所述目标物体在所述第二图像中的第二物体像素坐标、所述第一相机在所述第二图像中的第一相机图像坐标和第二相机参数,计算得到第一实际距离线和相机间距离线组成的第一夹角,以及第二实际距离线和所述相机间距离线组成的第二夹角,其中,所述第一实际距离线由所述目标物体与所述第一相机连线得到,所述相机间距离线由所述第一相机与所述第二相机连线得到,所述第二实际距离线由所述目标物体与所述第二相机连线得到;长度计算模块,用于根据所述第一夹角的值、所述第二夹角的值和所述相机间距离线的长度,计算得到所述第一实际距离线的第一长度和所述第二实际距离线的第二长度;相对位置计算模块,用于利用参考物与所述第一相机和所述第二相机中的任一个先选相机的参考长度、所述先选相机的参考角度、所述第一长度、所述第二长度、后选参考距离线和后选目标距离线组成的第三夹角,以及,所述后选相机与所述参考物之间的距离,计算得到所述参考物与所述目标物体之间的第一连线和所述目标物体与所述先选相机之间第二连线组成的第四夹角,其中,所述后选参考距离是指所述第一相机和所述第二相机中的
另一个后选相机与所述参考物之间的连线,所述后选目标距离线是指所述后选相机与所述目标物体之间的连线;以及,定位模块,用于根据所述第一长度、所述第二长度和所述第四夹角得到所述目标物体在空间中的定位。8.根据权利要求7所述的对视定位装置,其特征在于,所述长度计算模块,包括:用于根据当前相机的相机参数获取得到第三连线和拍摄轴之间的第五夹角,以及获取第四连线和拍摄轴之间的第六夹角,其中所述第三连线是指当前图像中的另一对视相机在当前图像中的对视相机像素点与焦距之间的连线,所述第四连线是指当前图像中所述目标物体在当前图像中的目标物体像素点与焦距之间的连线的模块;用于根据所述焦距和所述当前图像的原点之间的焦距长度、以及所述第五夹角,利用三角函数计算得到所述对视相机像素点与焦距之间的第三长度,其中所述原点为所述拍摄轴与所述当前图像的交点的模块;用于根据所述焦距长度以及所述第六夹角,利用三角函数计算得到所述目标物体像素点与焦距之间的第四长度的模块;以及,用于根据所述原点与所述对视相机像素点之间的连线,和所述原点与所述目标物体像素点之间的连线组成第七夹角,并利用所述第七夹角、所述对视相机像素点与所述原点之间的距离、所述目标物体像素点与所述原点之间的距离,根据三角函数计算得到所述对视相机像素点与所述目标物体像素点之间的第五长度的模块;用于利用所述第三长度、所述第四长度以及所述第五长度,计算得到第五连线和第六连线组成的夹角作为所述第一夹角或所述第二夹角,其中,所述第五连线是指所述目标物体像素点与所述焦距之间的连线,所述第六连线是指所述对视相机像素点与所述焦距之间的连线的模块。9.一种计算机可读存储介质,其存储有计算机指令,其特征在于,所述计算机指令被操作以执行权利要求1-6中任一项所述的对视定位方法。
技术总结
本申请公开了一种对视定位方法、装置及存储介质,属于空间定位领域。包括:利用一对拍摄装置同时拍摄目标物体的图像,分别得到第一图像和第二图像;根据第一物体像素坐标、第二相机图像坐标和第一相机参数,第二物体像素坐标、第一相机图像坐标和第二相机参数,计算得到第一夹角和第二夹角;根据第一夹角、第二夹角和相机间距离线长度,计算得到第一长度和第二长度;利用参考长度、参考角度、第一长度、第二长度、第三夹角,以及后选相机与参考物之间的距离,计算得到第四夹角;根据第一长度、第二长度和第四夹角得到目标物体在空间中的定位。本申请能够在保证定位精度时降低定位成本,能够实现后续重复模拟,能够形成阵列以覆盖更大面积。面积。面积。
技术研发人员:陈政
受保护的技术使用者:陈政
技术研发日:2022.10.26
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。