1.本发明涉及船舶与海洋工程水下装备技术领域,具体涉及一种无人潜航器水动力系数计算方法。
背景技术:
2.操纵性能是无人潜航器综合性能的重要组成部分,良好的操纵性能是无人潜航器安全航行和充分发挥其综合技术水平的重要保证。水动力系数是无人潜航器操纵性运动方程的关键系数,基于无人潜航器操纵性运动方程模拟操纵运动并预报操纵性,其中水动力系数的计算必须具有相当的准确性。
3.水动力系数计算是进行水下无人潜航器操纵性研究的基础,目前计算水下无人潜航器水动力系数的主要方法有三种:半理论半经验的估算方法、拘束船模试验和计算流体力学仿真计算。其中拘束船模试验是确定水动力系数最有效的方法,但通常需要耗费大量的人力物力,且试验周期较长;半理论半经验的估算方法适用于设计初期,计算结果目前还达不到工程精度要求,在实际研究中大多与其他方法结合运用;计算流体力学仿真的计算方法需要航行试验数据进行对比验证,因此多针对suboff型潜艇,并且对于复杂模型的水动力系数解算周期较长,对计算机的算力也具有一定要求。
4.matlab系统辨识(system identification)通过某种算法,利用模型输出与实际输出间的误差不断纠正模型参数(最小二乘准则),最终得到最优模型结果。对于已知数学结构的系统运动学模型,可使用matlab灰盒模型进行参数辨识,只需给定初值就能锁定可行解的范围,经多次迭代计算即可得到所求水动力系数值。
技术实现要素:
5.有鉴于此,本发明提供了一种无人潜航器水动力系数计算方法,在采用近似估算方法的基础上,利用matlab软件辨识得到水下无人潜航器的水动力系数,该方法兼具经济性与准确性,适用于主体为规则椭球体的水下无人潜航器。
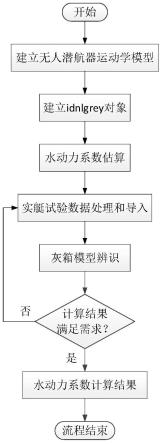
6.一种无人潜航器水动力系数计算方法,包括以下步骤:
7.步骤一:建立无人潜航器运动学模型;
8.步骤二:建立idnlgrey对象;
9.步骤三:估算无人潜航器水动力系数,作为后续步骤五中的初值;
10.步骤四:无人潜航器航行试验数据处理和导入;
11.步骤五:将步骤四的无人潜航器试验数据和初值代入步骤二的idnlgrey对象进行灰箱模型辨识;
12.步骤六:若步骤五所得水动力系数计算结果满足精度需求,则作为最终计算结果,否则,将步骤五的计算结果作为下一次初值,重复步骤四至六。
13.进一步地,所述步骤一中的无人潜航器水平面操纵运动表达式为:
[0014][0015]
无人潜航器垂直面操纵运动表达式为:
[0016][0017]
其中,u、v、w、p、q、r为潜航器在x、y、z方向的速度和角速度;δ为舵角系数,θ为欧拉角;x
vv
、x
rr
、x
vr
、yr、y
v|v|
、y
r|r|
、y
v|r|
、n
v|v|
、n
|v|r
、n
r|r|
、zw、z
w|w|
、z
w|q|
、mw、m
|w|
、m
w|q|
、m
w|w|
是水动力分量对潜航器运动参数的偏导数在展开点的值,统称为水动力系数;
[0018]
根据无人潜航器运动状态和水动力系数计算需求,参考无人潜航器典型空间操纵运动表达式建立无人潜航器运动学模型。
[0019]
进一步地,所述步骤二建立idnlgrey对象的过程如下:定义状态量x,控制量u,输出y=x;
[0020]
将无人潜航器运动学模型以idnlgrey对象的形式返回输出和状态导数作为时间、输入、状态和参数值的函数。
[0021]
进一步地,所述步骤三采用近似公式估算方法初步确定水动力系数,水动力系数包括加速度系数、速度系数、角速度系数和舵角系数,依据经验公式和查询图谱,对无人潜航器水动力系数进行初步估算;
[0022]
1)加速度系数:
[0023][0024][0025][0026][0027][0028]
[0029][0030]
其中,l、b、h为潜航器主轴尺寸,λ为各附体展弦比,μ(λ)为有限翼展的修正值,k
ij
(ij=11,22,33,55,66)为附加质量系数,x
ap
为各附体面积的水动力中心对原点的坐标值;
[0031]
2)速度系数
[0032][0033][0034][0035][0036]
其中,ε为干扰系数,为升力导数,为力矩导数,α
∞
为升力修正导数,k为厚度修正系数;
[0037]
3)角速度系数
[0038][0039][0040][0041][0042]
其中,为升力导数,为力矩导数;
[0043]
4)舵角系数
[0044][0045][0046]
其中,b
p
为螺旋桨的负荷系数,k
t
为螺旋桨的推力系数,j为螺旋桨的进速比,n、d、w分别为螺旋桨的转速、直径和伴流系数。
[0047]
有益效果:
[0048]
1、本发明的无人潜航器水动力系数计算方法基于无人潜航器运动学模型和实艇航行试验数据,利用了理论估算和参数辨识方法,相比于拘束船模试验方法,本方法采用自由航行试验数据,省去了拘束船模试验过程中耗费的大量试验成本和时间成本,更具经济性。
[0049]
2、相比于流体动力仿真计算方法,本发明基于实际试验数据,试验场真实航行环境相比计算机模拟的效果更具准确性。
[0050]
3、本发明的步骤三采用近似公式估算方法初步确定水动力系数,水动力系数包括加速度系数、速度系数、角速度系数和舵角系数,能够实现对无人潜航器水动力系数的初步估算。
附图说明
[0051]
图1为本发明无人潜航器水动力系数计算方法的流程图;
[0052]
图2为水下无人潜航器运动学参数示意图;
[0053]
图3为灰箱模型辨识拟合曲线。
具体实施方式
[0054]
下面结合附图并举实施例,对本发明进行详细描述。
[0055]
本发明提供了一种无人潜航器水动力系数计算方法,该方法的计算步骤如下:
[0056]
步骤一:建立无人潜航器运动学模型;
[0057]
以某水下无人潜航器为研究对象进行水动力系数计算,计算输入为该无人潜航器小舵角下的水平面操纵运动试验数据。忽略水动力泰勒展开式中的二阶及其以上项,只保留线性项,且不考虑横滚面的运动,建立无人潜航器运动学模型:
[0058][0059]
其中艏向速度u为1m/s;v,r,ψ,y分别为无人潜航器侧向速度、偏航角速率、偏航角、侧偏距,如附图2所示;δr为方向舵偏转角;m为质量;iz为偏航转动惯量。
[0060]
步骤二:建立idnlgrey对象;
[0061]
定义状态量x=[v,r,ψ,y]
t
,控制量u=δr,输出y=x。
[0062]
将无人潜航器运动学模型以idnlgrey对象的形式返回输出和状态导数作为时间、输入、状态和参数值的函数。
[0063][0064]
步骤三:估算无人潜航器水动力系数,作为后续步骤五中的初值;
[0065]
无人潜航器近似估算所需参数:水下全排水容积航行器长度l、航行器的高b、宽h、各附体的投影面积s、展长l、弦长b、面积中心至动坐标系原点(重心)的纵坐标x、展弦比λ,如下表所示:
[0066][0067][0068]
1)加速度系数:
[0069][0070][0071][0072][0073][0074][0075][0076]
2)速度系数:
[0077]
取干扰系数ε1=ε2=1,由查表得到:
[0078][0079]
[0080][0081][0082][0083][0084]
3)角速度系数:
[0085]
取浮心位置修正系数为1,干扰系数ε5=ε6=1,由b/h=1,查表得到:
[0086][0087][0088][0089][0090][0091]
4)舵角导数:
[0092]
取干扰系数ε3=ε4=1
[0093][0094][0095][0096]
步骤四:无人潜航器航行试验数据处理和导入;
[0097]
获取无人潜航器航行试验数据,选取横向速度v,偏航角速率r,偏航角ψ,侧偏距y,方向舵偏转角δr进行数据预处理,预处理包括:导出潜航器内部存储数据;对存储数据(16进制原始数据)进行解码,转换为可读数据,以iddata对象的形式导入工作空间,也就是将数据转化为软件可处理的形式。
[0098]
步骤五:灰箱模型辨识;
[0099]
设置连续仿真时间t=0.2s,将步骤四的无人潜航器试验数据和初值代入步骤二的idnlgrey对象进行灰箱模型辨识,将结果无因次化:
[0100]yv
=-0.0112,yr=0.00662,nv=-0.00723,nr=-0.00109,nd=-0.00353。
[0101]
步骤六:多次迭代计算。
[0102]
若步骤五所得水动力系数计算结果满足精度需求,则作为最终计算结果,否则,将步骤五的计算结果作为下一次初值,重复步骤四至六,直到仿真曲线拟合结果满足需求(拟合误差不大于15%),仿真结果的界面如附图3所示。
[0103]
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。